|
|
1. UC-win/Road Ver.9 Part 1
2. UC-win/Road SDK Ver.8
3. Overseas Training and Seminars
|
| 1. UC-win/Road Ver.9 Part 1 |
In traffic safety research, vehicle and vehicle-infrastructure cooperation research and development, it is essential to conduct investigation, verification, and experiment under various driving conditions. The necessity of reproducing driving conditions very accurately is significantly increasing in the industry today in which intelligent transport system such as automated system and in-vehicle assistance system are being developed. In order to meet this demand, scenario function, micro simulation player, and the cluster system have been enhanced and the autonomous driving feature has been added to UC-win/Road Ver.9 as new features.
Apart from the improvement of the simulation features, the operability has also been improved and a new modeling function has been added.
- Scenario function has been enhanced so that surrounding vehicles and traffic as a whole within a scenario can be controlled very accurately.
- Micro Simulation Player plays a prerecorded simulation. It's interoperability
with traffic simulation has been improved in this new version.
- In a cluster system, driving/walking simulation can not only be performed
from a master PC but also from client PC. The term active client refers
to the ability of client PCs to control vehicle/pedestrian within the 3D
environment. When one user is driving or walking within the 3D environment
from a client PC, the 3D environment on his/her screen can now be synchronized
with the 3D environment on the screen of other the client(s) connected
to the cluster system.
- An autonomous driving feature not only reproduces the behavior of vehicles
equipped with Adaptive Cruise Control (ACC), but also allows you to make
your vehicle run autonomously.
- Thanks to the addition of model panel, it is now possible to import,
place, or search all types of models using one window.
- Older versions allowed users to create road marking, road signs, trees,
etc. by assigning its parameter. In this new version, stairs, posters,
LED road signs, escalators, and fences can also be created as a parametric
model.
|
| Improvement of traffic simulation function |
Improved scenario
The scenario function of UC-win/Road Ver.9 has become more intelligent than that of previous version. One of the improvements concern the dynamically controllable parameter mentioned in the following paragraph.
First, the speed at which each of the surrounding vehicle is traveling,
the lane number of the lane on which each vehicle is traveling and its
offset distance inboard from each of the lane delimiters can be now changed.
In addition, the system can create a control command that triggers a specific
event at a specific time and place within a scenario based on the information
of the vehicle-in-front from your vehicle's perspective. Furthermore, your
vehicle's parameters concerning ACC feature can now be changed. The same
type of parameters that can be assigned to other vehicles can now be assigned
to your vehicle as well.
Moreover, it is now possible to assign information of the vehicle in front as a condition that triggers a specific event within a scenario. This means that you can assign the information of the vehicle-in-front relative to your vehicle (such as how far ahead the vehicle-in-front is) as a condition that determines the next event within the scenario at a specific time and place. This mechanism is in line with the control command explained earlier. For example, the distance between your vehicle and the one in front and time to collision can be used as a reference for controlling the transition of the scenario. These commands can be used to reproduce various driving conditions. One of the many things that you can do using this feature is creating a scene in which the other vehicle cuts in front of you by creating a command that makes the other car change lanes according to the distance between your vehicle and the one in the right turn-only lane, or make the vehicle-in-front move more or less laterally by changing its offset distance inboard from each of the lane delimiters.
Another amazing thing about Ver.9 is its ability to control pedestrian simulation in that it is now possible to select pedestrian model and to assign a point from where the pedestrian starts walking and a point at which it stops.
Traffic snapshot function
Feature that takes a snap shot of a traffic condition has been added to make traffic simulation more versatile. In the previous version, a simulation recorded by the taking advantage of the Replay plug-in or Microsimulation Player can be played. The traffic snapshot feature has been built on top of this feature, allowing you to start a simulation under a specific traffic condition. The new feature comes in handy when you want to resume a simulation under a saved traffic condition in which there are many vehicles. Since the driving condition of your vehicle is saved as well, you can start driving as the simulation starts i.e. drive within a predefined simulation.
ACC/Autonomous driving feature
The ability to reproduce behavior of the driving vehicle equipped with ACC and to reproduce autonomous driving within a simulation has been added. These functions can be applied in research and education on ITS and traffic safety.
An algorithm unique to ACC based on autonomous driving feature equipped on each and every vehicle within a traffic simulation in UC-win/Road has been developed. Thanks to this development, it is now possible for vehicles to keep within a specific traveling speed and time to collision, and for vehicles to switch from manual driving to autonomous driving and vice versa. Furthermore, by running vehicle-infrastructure cooperative simulation, vehicles can recognize traffic signals and speed limit.
 |
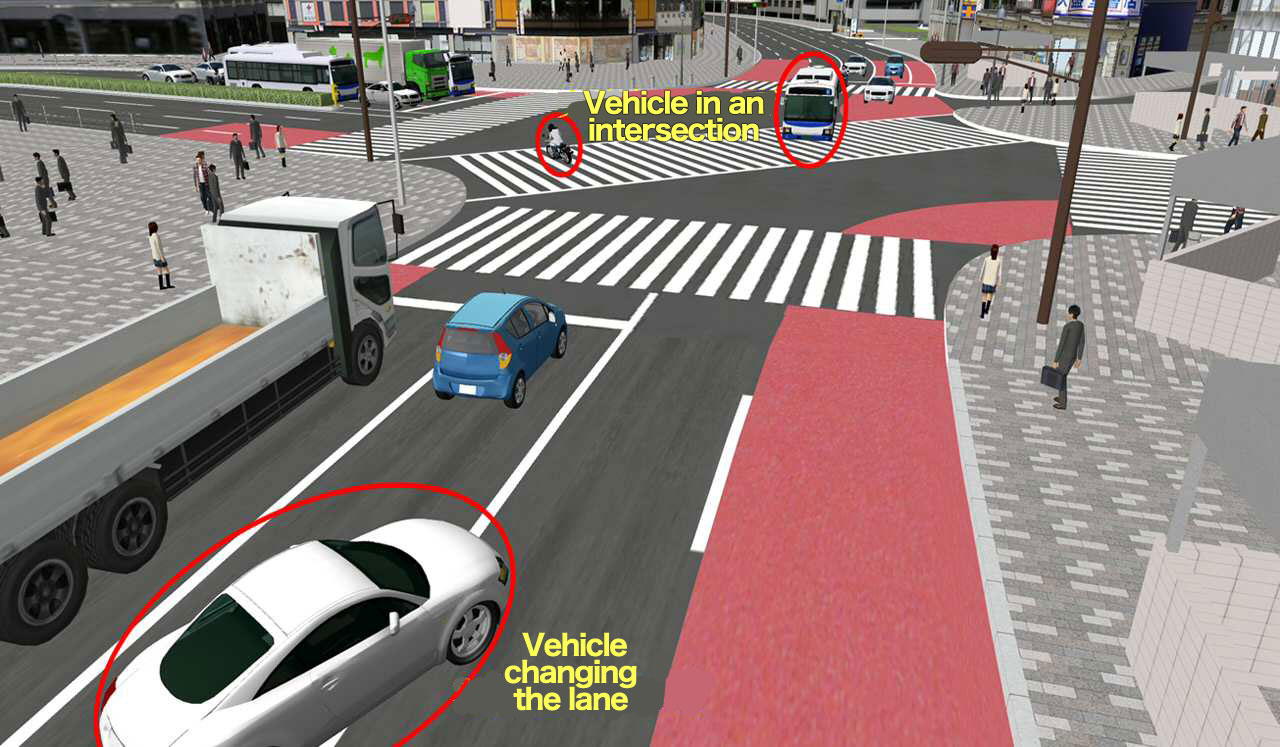 |
Figure 1 A scene where a vehicle cuts
in front of you because there were enough space. |
Figure 2 After resuming a simulation
from a saved traffic condition (traffic snap shot) |
|
| Improvement of cluster system |
Driving simulator synchronization feature
Only one person (who is controlling the mater PC) can drive in the cluster system environment (realized by Cluster plug-in that is sold separately) based on the older versions of UC-win/Road. In Ver.9, multiple users can drive or walk within same the 3D environment at the same time. This new feature is called the active client. Driving/walking simulation can be achieved through the use of devices listed in table 1 below.
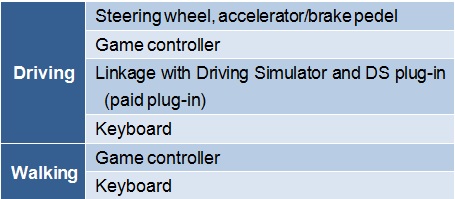
Table1: The above devices can be used to control vehicle / pedestrian model
from client PC.
As the system synchronizes each and every PC via cluster plug-in, the VR environment shown on each and every computer that are connected will all be the same.
Because this is a cluster system, synchronization amongst each user is performed using low latency. Latency is the time it takes for your PC to display the movement of vehicle controlled by a different PC. It is possible to keep the latency within 1 frame.
Another great thing about the cluster system is its ability to completely
synchronize every simulation elements including traffic condition, weather,
movable model, and an element that dictates how flags and tress move with
the wind, and hence each and every user can run a simulation at the same
time under the same condition. Furthermore, the administrator of the master
PC can track the active client's field of view. Moreover, simulation run
by multiple users can be controlled using a scenario.
If you are taking advantage of the simulation technology that UC-win/Road has to offer in order to do your own experiment, you may think that it would be convenient if logs written during the simulation can be output. If you are one of the many valued users who dreamed of doing this, we are pleased to inform you that part or all of the log written during a simulation can now be output from the master PC. From the client PC, logs describing the information related to vehicle or pedestrian controlled by users along the surrounding vehicle and pedestrians can be output.
The ability to calculate the log of 1 vehicle or 1 pedestrian controlled by the user using a client PC has been incorporated to UC-win/Road Ver. 9. On top of this we plan to incorporate the ability to distribute simulation as a whole in future releases.
Improvement of client settings
An option for hiding the backdrop of 3D environment:
You can choose to hide the backdrop of 3D environment so that HUD of UC-win/Road, image within the scenario, message, image shown on video, and image within a script are displayed without the backdrop. For example, you can hide the backdrop of 3D environment and then show multimedia contents on low spec PC connected to the cluster system so that synchronization performance does not go down.
Compatibility to dome projection:
New dome projection settings have been incorporated allowing you to draw
using vertical FOV and horizontal FOV simultaneously without considering
the aspect ratio of the screen. In addition, the projector's pitch angle
can be adjusted.
 |
 |
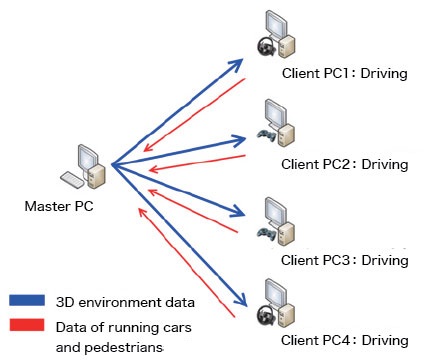
Figure 3 Driving simulator
synchronization structure |
Figure 4 Example of driving simulator synchronization |
|
|
| 2. UC-win/Road SDK Ver.8 |
| Here the new functions of the newly released UC-win/Road SDK Ver.8 are
introduced. , UC-win/Road SDK Ver.8 supports Delphi XE2, a version of Delphi
that was not supported in older versions of SDK. |
| Refactoring of the class structure |
| In UC-win/Road, class structure has been changed so that all the resources
can be managed and edited in the same manner. In the SDK of UC-win/Road
V8, the super class of elements displayed within 3D space such as 3D models,
trees, and texts, has been newly added. This class is called "Model
resource class" and provides the common interface of the displayed
element. The specification of a subclass has not been changed , however,
some common processing can now be performed easily. |
All the windows (a camera view, a view of the center and on the left and right sides, 2D view, etc.) can now share the resource of OpenGL automatically.
The state of texture object, numbering, display list, and each and every buffer object can all be managed easier than ever before. Regarding the plug-in that was creating the OpenGL screen independently, the time and effort required for development can now be reduced thanks to the automation of resource sharing. |
A Waypoint can now be arranged on a crossing.
A Waypoint is added to the crossing by specifying the run route object on which you wish to arrange the waypoint.
Moreover, it came to be able to confirm whether the original Waypoint objects and commands are enabled or disabled by invoking a callback when commands related to the Waypoint are executed. |
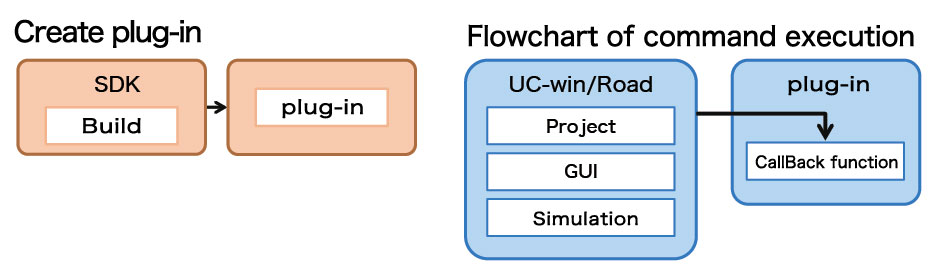
| Running traffic simulation |
Until the previous version, traffic simulation could only be run from GUI. This is now possible via API.
This is done by specifying the simulation time limit and then bringing it into operation. In addition, the progress ratio can be acquired while simulation is running. Furthermore, cancellation command and the CallBack function for routine treatment can also be used. |
| Control of the traffic lights |
The traffic lights in a crossing can now be controlled during a simulation.
Specifically, while the color of the traffic lights is changing according to the assigned signal phase, you can switch around signal phases themselves at your own discretion.
When switching, specify the switchover time. In conjunction with this function, the information on signal phase assigned on each and every crossing can now be acquired.
Combining this function with the function for running traffic simulation allows you to run traffic simulation using various patterns of signal phase and timing in a short time. |
Traffic vehicles can be generated on a crossing. The vehicles once generated on the road can be moved to an arbitrary crossing.
Since the run route within the crossing is automatically recognized when a vehicle is generated on or moved to the crossing, the vehicle can be moved to the crossing only by specifying the position and the direction of the vehicle.
This function is useful when initializing traffic or when reproducing a saved traffic condition. |
| Acquisition of audio information |
The sound (the whole synthetic sound) currently outputted from UC-win/Road can now be acquired in real time.
The information on sound is acquired by acquiring a buffer little and little via CallBack. The buffer is in uncompressed WAVE format, and the system enables you to acquire the format information about this sound.
This feature is useful for recording, audio transmission in real time, and analysis to name a few. |
| Add the project information |
The thumbnail of the project object representing a data file can now be edited. Up The thumbnail was automatically saved at the time of saving a file, but in this new version, thumbnail can now be added as a property of a project, acquired as data, and edited.
Since the images other than 3D space can also be saved, you can customize the visual property of the Explorer and the icon for re-opening a project, not to mention GUI that can be used for this kind operation is available.
In addition to thumbnail, copyright and creator's name can now be saved. |
We will continue to upgrade or develop new products so that they can meet
your needs.
|
|
| 3. Overseas Seminars and Exhibition |
Exhibition
| Date |
Exhibition Name |
Location |
| 4/6/11, 2013 |
NAB SHOW |
Las Vegas Convention Center, USA |
For more information and applications, please email us at
mailto : forum8@forum8.com
Gross circulation:6633
To subscribe this page, go to http://www.forum8.co.jp/english/p-mail-e.htm
If you would like to unsubscribe from our newsletters, please include "Unsubscribe"
in the subject title of your email and send it back to us.
Thank you for your continued support.
FORUM8 Co., Ltd. mailto:forum8@forum8.co.jp
Nakameguro GT Tower 15F
2-1-1 Kamimeguro Meguro-ku Tokyo 153-0051 JAPAN
TEL +81-3-5773-1888
FAX +81-3-5720-5688
http://www.forum8.com/ |
|