Product Overview
 |
|
The Lily Car is a scale model robotic car, which purpose is to emulate
on a small scale the behavior of actual cars and help the development of
robotic cars. It originates from the rapidly increasing transfer of robotics
technology to the car industry, mainly to improve the safety and transport
in an autonomous way of persons who cannot drive (persons visually impaired,
children…). A Lily Car prototype is shown on Figure 1: it is based on a
chassis of a 1/10 RC car, a driving and a steering motor, infrared distance
sensors for collision detection at the car level, an AR marker for the
car tracking, a wireless module to allow communication and control from
a remote PC, and a main controller to manage the whole system.
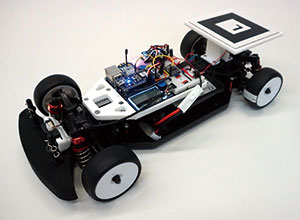 |
 Figure1 Lily Car prototype Figure1 Lily Car prototype |
|
|
Feature/Function
|
|
Autonomous control demo system
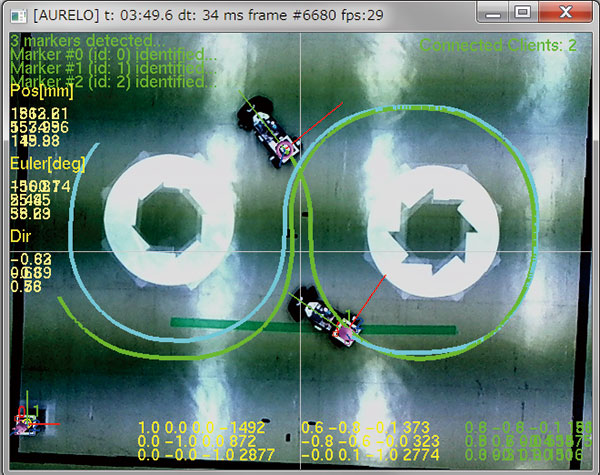
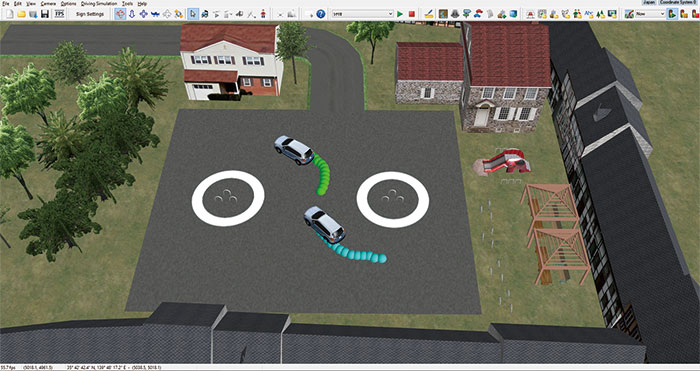
e are currently developing a system to demonstrate the autonomous driving, which includes 3 sub systems: a set of 2 Lily Car, a real time 3D tracking system based on Augmented Reality (Aurelo, Figure 2), and UC-win/Road for the visualization in a 3D virtual environment (Figure 3). The whole system is shown in Figure 4.
In the current system, the cars run autonomously on a test course, with several predefined paths. At any time, the user can switch the control mode between the manual or autonomous mode. The PC control interface connects to the Aurelo system to get the position and orientation of each car and sends the proper commands to the cars to make them follow the selected path. The next step will be to move the path planning and decision making processes from the controlling PC to the car's main controller, and send to the car only its localization data to emulate self-driving cars moving autonomously based on GPS information and on board sensors data. Also, a global supervision system will take over the control to prevent collisions whenever a car shows an unexpected behavior.
 |
 |
| Figure2 Aurelo 3D localization system |
Figure3 Visualization in UC-win/Road |
 |
| Figure4 Autonomous control system |
|
|