Résumé du programme
 |
|
OHPASS (Optimal Highway Path
Automatic Search
System) est une méthode pour calculer des formes linéaires optimales
comme l'autoroute. Son particularité: l'utilisation des algorithmes
génétiques.
D'abord, on cherchait comment on pouvait simuler des formes linéaires
flexiblement et rapidement. En 2000, Mitsubishi Research Institute, qui
a accepté la demande du laboratoire de Japan Highway Public Corporation
(aujourd'hui Nippon Expressway Research Institute Co., Ltd.), a
commencé le développement et effectué la modélisation du profil de
courbe et de l'alignement horizontal. On envisage d'adopter le modèle
linéaire de point de passage et les algorithmes
génétiques pour évaluer et optimiser les formes linéaires dessinées à
partir de ce modèle linéaire.
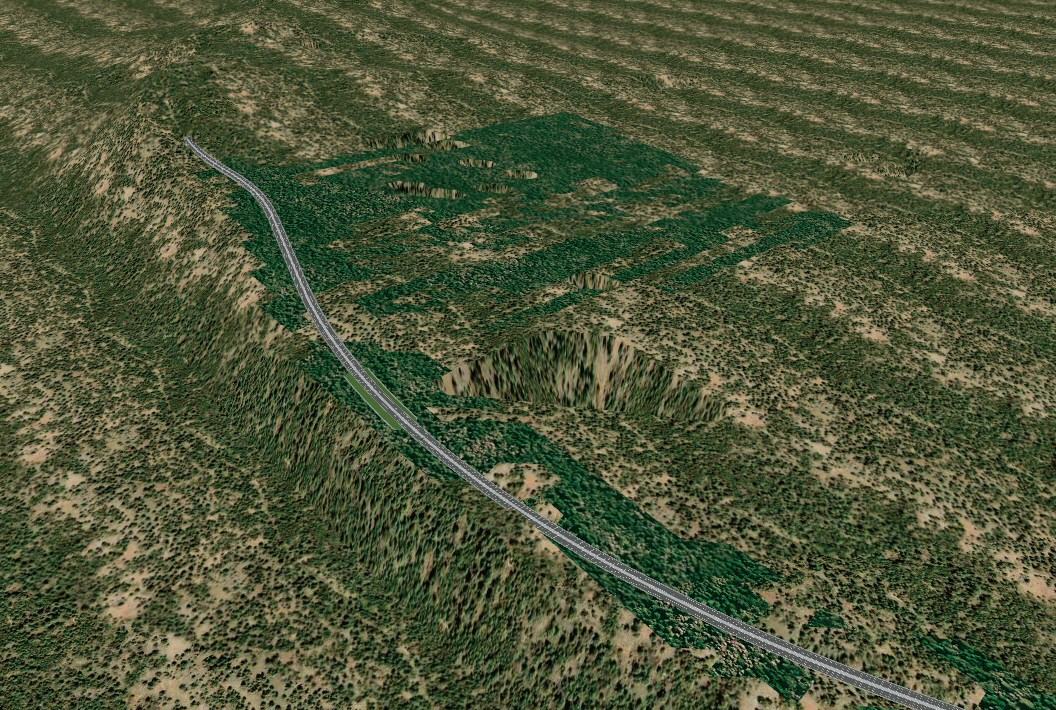
C'est ainsi que s'est construit le système de recherche de la forme
linéaire optimale de route, "OHPASS", qui simule et évalue des formes
linéaires de routes dessinées sur une donnée de terrain numérique et
qui permet de réduire le coût de travaux et d'améliorer l'équilibre du
nombre de travailleurs.
|
|
Présentation
des nouveaux produits
|
|
|
OHPASS 2013
|
| |
Principaux points forts /
fonctions |
|
Le processus du programme est comme décrit
ci-dessous.
- Définition des conditions initiales
- Configuration des conditions de calcul
- Calcul, affichage des résultats
Définition des
conditions initiales
Les trois fichiers ci-dessous seront définis et importés en tant que
conditions initiales.
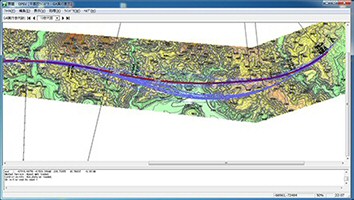
Information de terrain numérique
On utilise un fichier DXF qui contient des informations de terrain en
3D. Les informations de terrain importées seront converties vers une
maille de terrain en 3D.
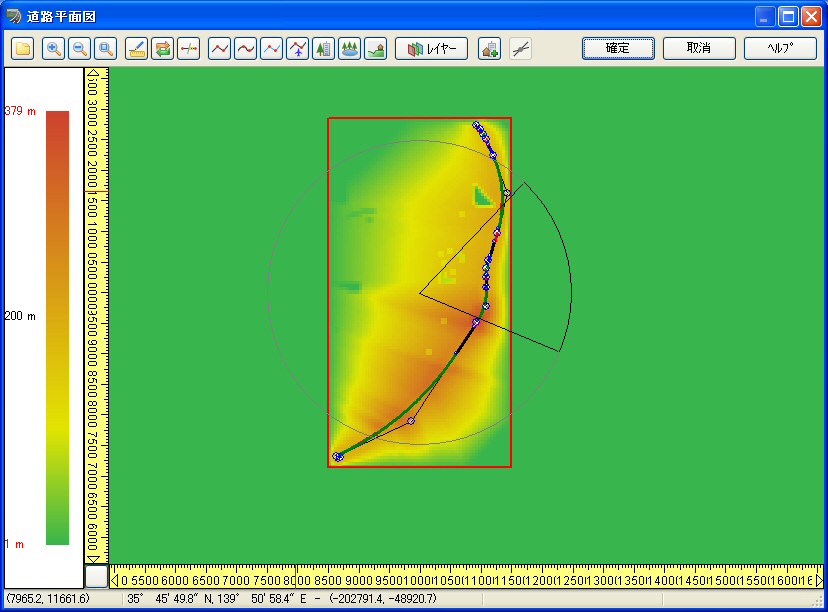
Définition de la forme linéaire planifiée
On prépare une forme linéaire provisoire et fixe un champ approximatif
sur le calcul de forme linéaire. On limite le champ en fonction du
champ de terrain. Si on ne limite pas, il arrive que la forme linéaire
ne soit pas fixée.
Configuration de point de contrôle
On fixe les points à éviter avec l'alignement horizontal, avec le
profil de courbe et les points à éviter le plus possible.
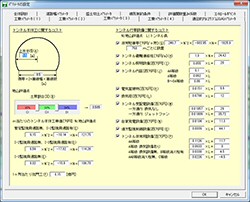
Configuration
des conditions de calcul
Ensuite, on fait des configurations.
Pour obtenir la forme
linéaire optimale, on entre la condition de la forme linéaire, la
configuration de la section transversale, le coût des travaux, la
configuration de point de contrôle, celle de l'algorithme, celle de
l'évaluation.
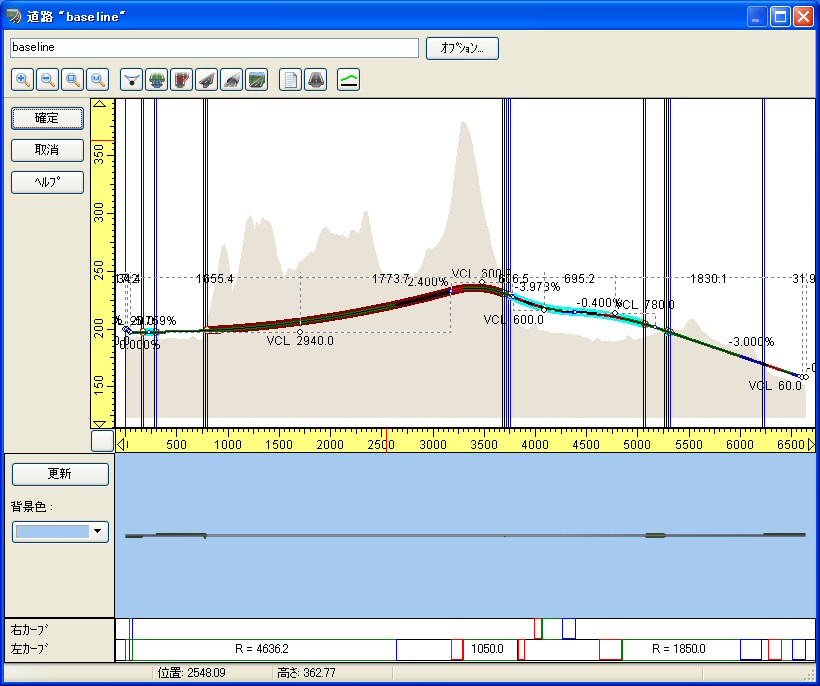
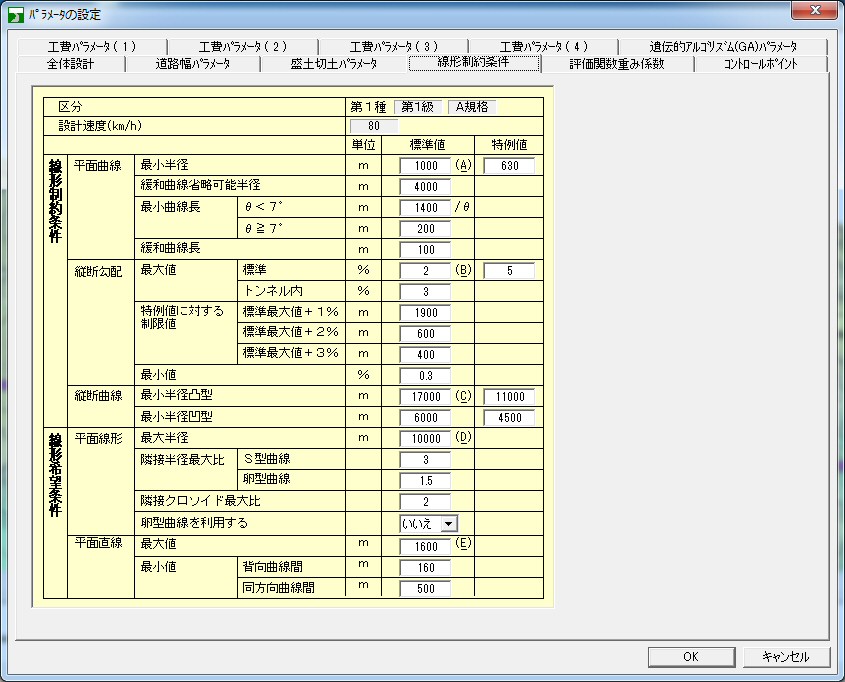
Condition de la forme linéaire
On fait la configuration des
rayons maximaux et minimaux de l'alignement horizontal et du profil de
courbe. Concernant des sections transversales, de petites structures,
des tunnels, des ponts et des ponts, on fait la configuration de
conditions nécessaires comme la valeur de dimension.
 |
|
 |
Configuration
de la condition
de la forme linéaire |
|
Configuration
du paramètre
de la conception de route |
Configuration des conditions du coût des travaux
 |
Configuration
des conditions
du coût des travaux |
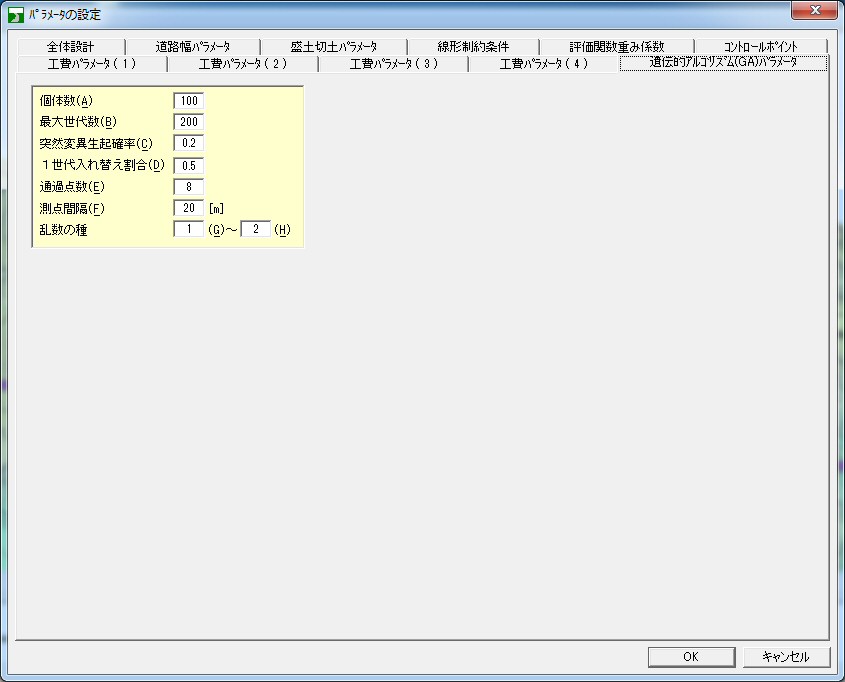
Configuration de l'algorithme
On fait la configuration des conditions : jusqu'à quelle génération de
forme linéaire on calcule, ce qu'on va faire pour l'incidence de la
mutation.
 |
| Configuration
des algorithmes génétiques |
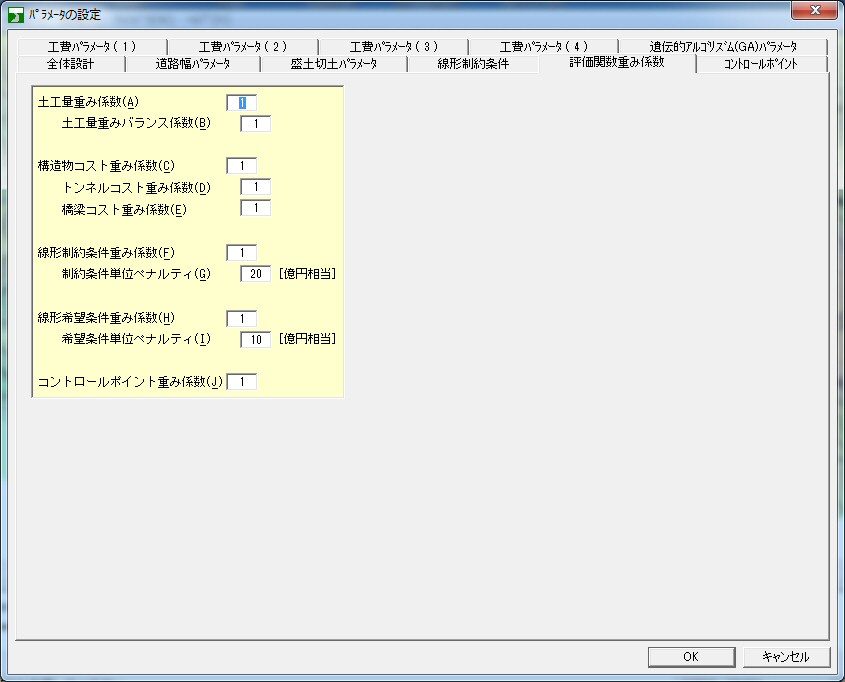
Configuration de l'évaluation
En configurant l'évaluation, on peut configurer la densité de poids de
travailleurs, de tunnels, de pont ou on peut configurer une pénalité et
faire une évaluation quand la condition linéaire n'est pas satisfaite.
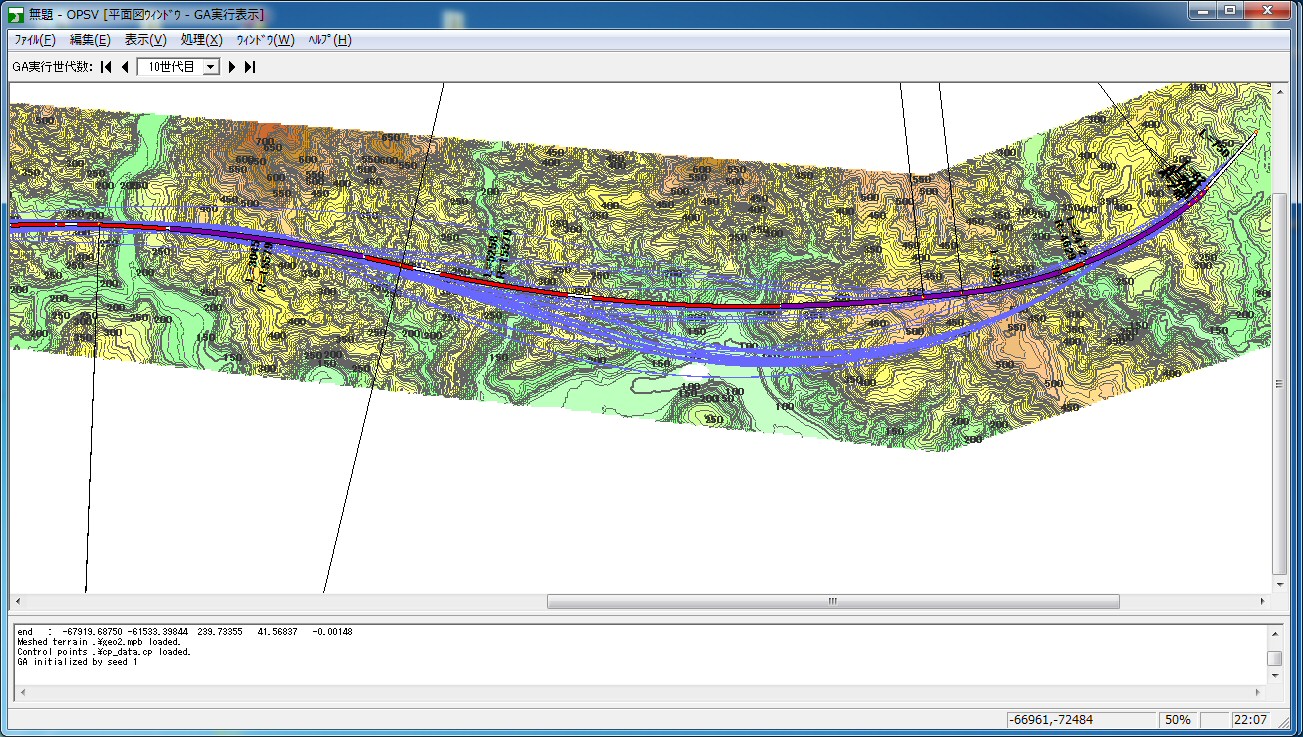
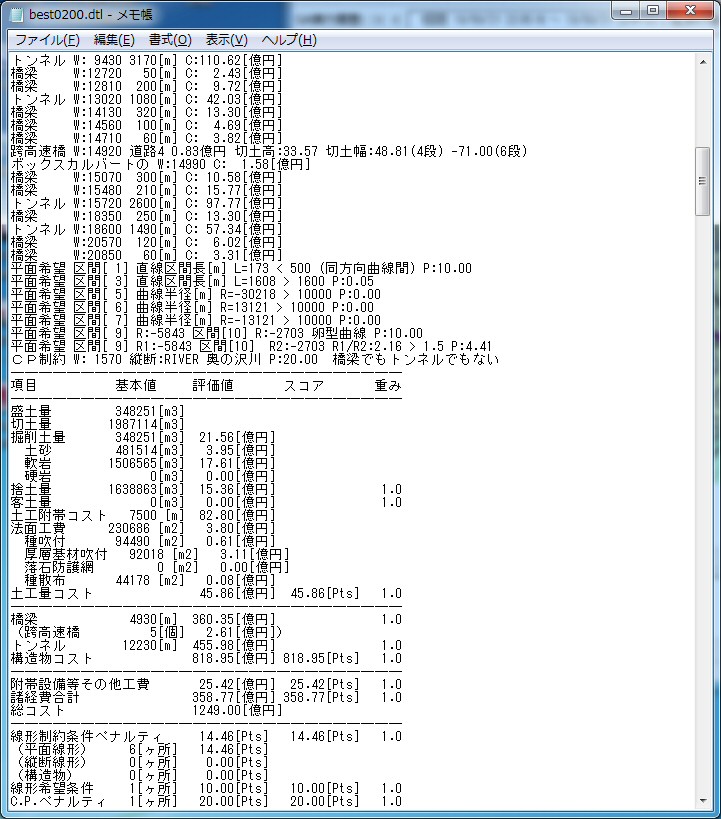
Calcul,
affichage des résultats
Pendant
le calcul et l'affichage des résultats de calcul, on peut dessiner et
vérifier des formes linéaires initiales, des formes linéaires de chaque
génération et des formes linéaires optimisées.
Les résultats seront exporté à des fichiers textes et on peut vérifier
les formes linéaires, le coût des travaux et l'évaluation.
 |
 |
Calcul
et jugement
du coût des travaux |
Affichage
de la génération et la forme linéaire optimale |
|
|