Le système possible d’opérer la conduite de UC-win/Road avec les mouvements des mains devant KinectTM comme l’opération de la direction. On change les informations des positions de mains du conducteur détécté par KinectTM en direction, accélérateur et frein.

Le capteur de Kinect
Qu’est-ce que le capteur de Kinect
Le capteur de KinectTM (Kinect) est aussi utilisé comme périphérique de jeu vidéo à usage doméstique « Xbox360® » de Microsoft. Il est l’appareil possible d’opérer avec mouvement de corps, geste, voix, etc. sans utiliser contrôleur. Il est chargé de caméra et capteur, et si un joueur est debout devant Kinect, il est reconnu automatiquement.
Cette technique est basée sur la technologie de l'appareil photo de distance
développée par la société de recherche et de développement, PrimeSense.
Le capteur comprend un appareil photo VGA, un scanner 3D, quatre microphones,
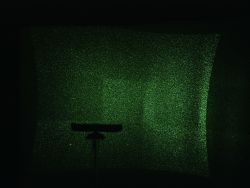
un moteur en pente. Le scanner 3D est composé d'un laser infrarouge (la
fréquence est un peu plus basse que le feu rouge), qui affiche des points
de manière continue. Le laser n'est pas visible aux yeux humains (la longueur
d'onde est environ 780nm) , mais on peut les retrouver avec un appareil
photo vision nocturne (Figure 1a, 1b).
 |
|
 |
Figure1a
Image du capteur de Kinect
en mode vision nocturne |
|
Figure1b Vue d'agrandissement
des points projetés sur un mur |
1. Sortie d'image de distance
Nous offrons des images
de distance (chaque pixel porte la distance de l'objet le plus proche du
capteur) de 640 x 480 pixels
2.Détection et poursuite d’utilisateur
Il est possible de détecter et poursuivre le corps humain dans la vue de capteur.
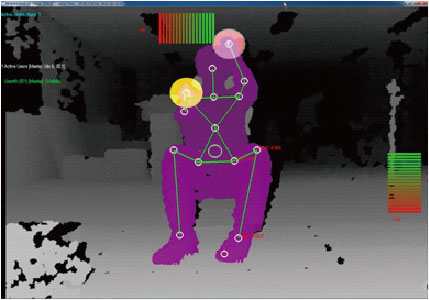
3.Détection et poursuite de squelette
Il est possible de détecter et poursuivre la position d’articulation du corps humain.
Air Driving Interface
4.Air driving
Reconnaîssant l’opération de volant des deux mains et celle d’accélérateur
et de frein du pied droit, l’opération de geste de la simulation de conduite
devient possible ( il correspond au mouvement de direction, accélérateur
et de frein en UC-win/Road ).
 |
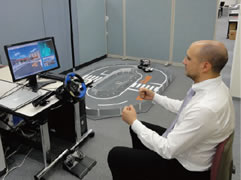
Capteur KinectTM et la simulation
de conduite de geste d' UC-win/Road
avec l'affichage dynamique 6K multi-cluster
(Tokyo Game Show 2011) |
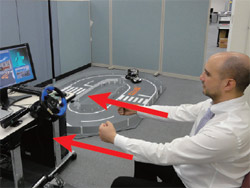
Contrôle de véhicule et image d’opération de conduite de Kinect
En coopération avec UC-win/Road, il est possible de faire l’expérience
de la simulation de conduite tenant "volant virtuel" seulement
avec le mouvement de mains.
- État de neutralité
On réalise l’opération d’accélérateur et de frein d’après la distance de
KinectTM jusqu’aux mains. On opère avec le mouvement en avant et arrière
de l’état de neutralité.
- Opération de direction(tourner à droite et à gauche de l’état de neutralité)
On réalise l’opération d’accélérateur et de frein d’après la distance de
KinectTM jusqu’aux mains. On opère avec le mouvement en avant et arrière
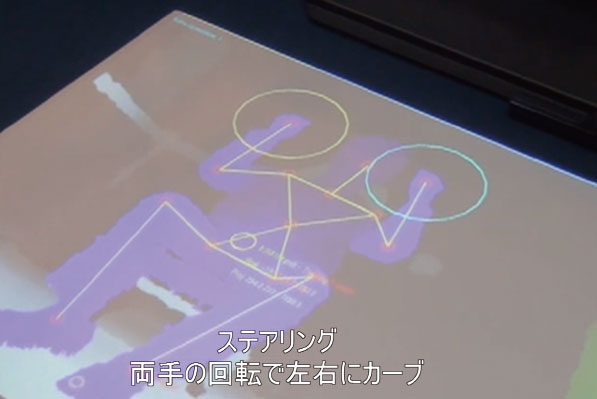
de l’état de neutralité. Il est possible d’opérer la direction en tournant
les mains comme la direction réelle. On peut tourner à droite et à gauche
avec le tour de bras comme une voiture réelle.
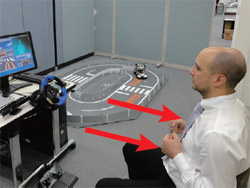
- Opération d’accélérateur
On accélère en sortant des mains de l’état de
neutralité. On accélère d’autant plus qu’on sort loin en avant.
- Opération de frein
On freine en tirant des mains de l’état de neutralité. On freine d’autant plus qu’on les tire.
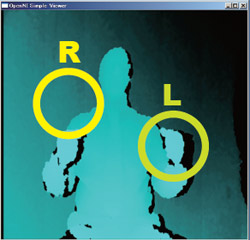
- Détection de direction et quantité d’angle de volant
On détecte la direction et l’angle de volant du virage à droite et à gauche
comme valeur analogique à partir de la relation de position des poings
droit et gauche sortis an avant.
 |
 |
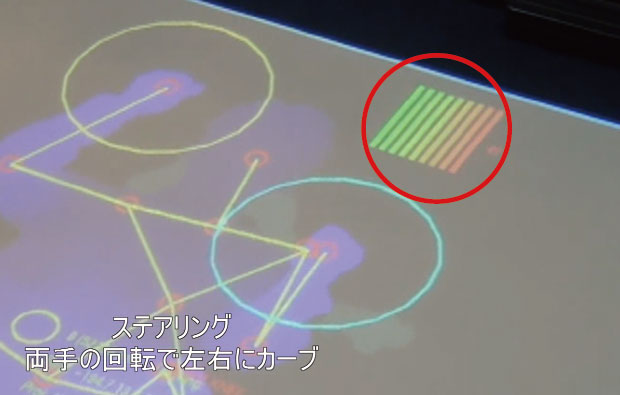 |
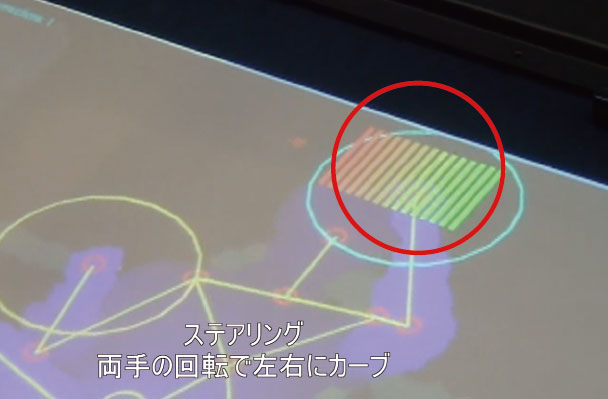
| Aller droit |
Virage à droite : barre
se développe à droite
d’autant plus qu’on tourne
le volant à droite. |
virage à gauche : barre
se développe à gauche
d’autant plus qu’on tourne
le volant à gauche. |
- Distinction d’accélérateur et de frein
On distingue avec la détection d’angle de la pointe des pieds droites.
 |
 |
| Position d’accélérateur |
Position de frein |
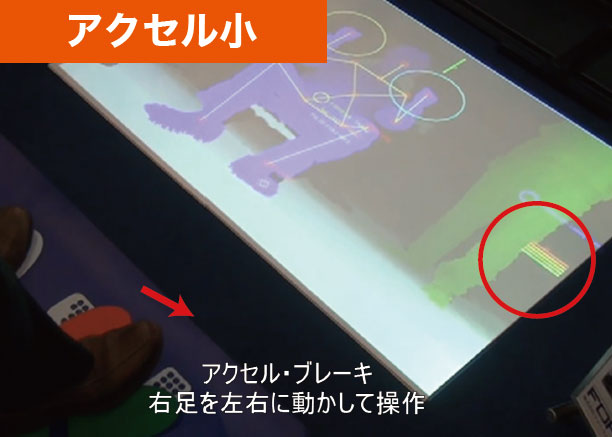
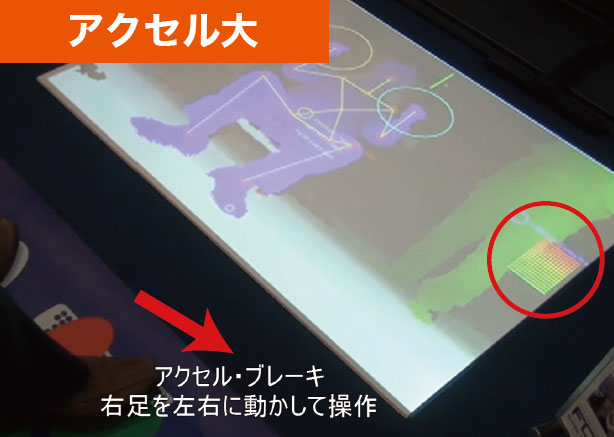
- Détection de la quantité d'accélération et de freinage
Accélérateur
Il est détecté comme valeur analogique à partir de la quantité de la pression
que le conducteur exerce sur la pédale d'accélérateur. Accélérateur : La
barre rallonge vers le haut.
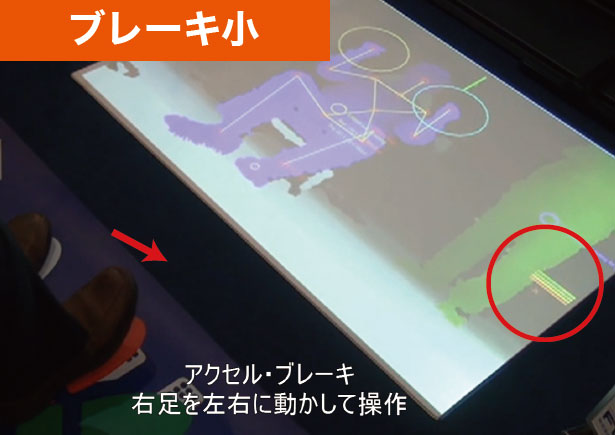
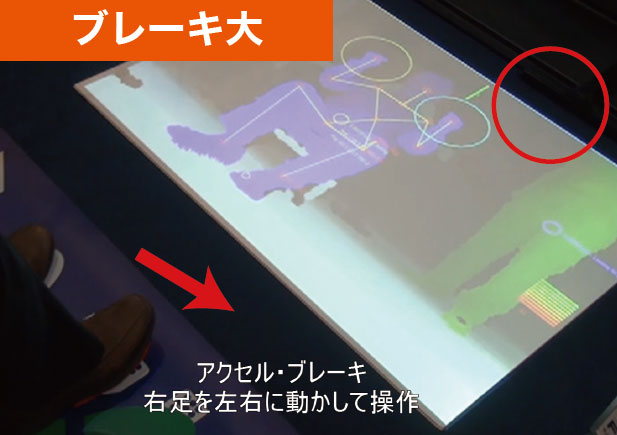
Frein
Il est détecté comme valeur analogique à partir de la quantité de la pression
que le conducteur exerce sur la pédale d'accélérateur. Frein : La barre
rallonge vers le bas.
5. Levier d’embrayage virtuel
On reconnaît le geste du mouvement de saisie et de l’opération d’embrayage
de l’objet(Il correspond au changement de l’avance et le recul en UC-win/Road.).
6. Geste Interface
On reconnaît les douze sortes de mouvements au maximum par rapport aux combinaisons des mouvements verticals et horizontals de la main droite(Il correspond au changement de l’avance et le recul en UC-win/Road.).
|