充実したモジュール構成により、高度、低コストのカスタマイズ開発が可能
関連製品: UC-win/Road
サービスの概要と特長
細分化モジュールによる高度で柔軟かつ低コストの開発
●モジュールの変更/追加が容易(ドライビングシミュレーションシステム)
UC-win/Road車輌運動モデルの変更、ユーザのハードウエアへの変更及び運転状況のログ出力などのカスタマイズを行った開発事例です。従前のモジュール構成として通常のゲームコントローラーからペダルとステアリングハンドルの操作量を入力し、車輌の運動を計算します。更に、車輌の加速度と軌道の計算を独立したモジュールで行い、車輌のエンジン運動モデルのカスタマイズや、路面とタイヤの密着モデルを要求に合わせることが可能になりました。「アナログペダル装置入力」および「ペダル操作入力切替」モジュールの追加で、ゲームコントローラと他のハードウエアの共存を確保し、アナログ装置への対応ができました。最後に「ログ取得と保存」モジュールを追加したことによって、ドライビングシミュレーションに関する情報の取得と出力が可能になりました。
高度化機能、新機能の利用
●新モジュールの開発/開発中製品の機能を先取り
カスタマイズで新機能を実現したい場合は、基本技術を独自開発し、幅広くパッケージの新機能として生かせるように設計、開発を進めています。運転シミュレーションを大きく向上する走行シナリオ機能は、カスタマイズ提供を経て蓄積してきたノウハウを生かして開発を進め、次バージョンに新たな機能として搭載されます。シナリオ機能により、走行中にイベント発動させ、運転者の反応を引き出したり、さまざまな運転のストーリーを展開させることができます。また、コンピューターグラフィックスの最新技術に関しても、Shaders言語を採用し、地形のテクスチャ処理や光源の高度な表現などを開発しています。
ハードウェアとの連携による高度シミュレーションの実現
●UC-win/Roadドライブシミュレータ・モーションプラットフォーム
ハードウェアとの連携で代表的なUC-win/Roadドライブシミュレータ(DS)のカスタマイズも可能です。「モーションプラットフォーム」は、より体感的、現実的なシステムとして最大6自由度に対応可能です。DSの開発実績では、自動車研究、安全システム開発、訓練シミュレータ、広報用シミュレータの開発実績があり、鉄道シミュレータにも活用されています。ハードウェアとの連携では不可欠のリアルタイム3次元VRの特長を生かすばかりではなく、柔軟な3D空間の作成、変更、シナリオやイベント制御も自在に行えるシステムですのでさまざまなシミュレーションニーズをカバーできます。
関連情報
- ◆記事掲載
- 3DVRによる重機の遠隔操縦システムが国交省北海道開発局「 北海道開発技術研究発表会」に掲載(2020/03/11)
カスタマイズ事例
<各種ドライブシミュレータ>
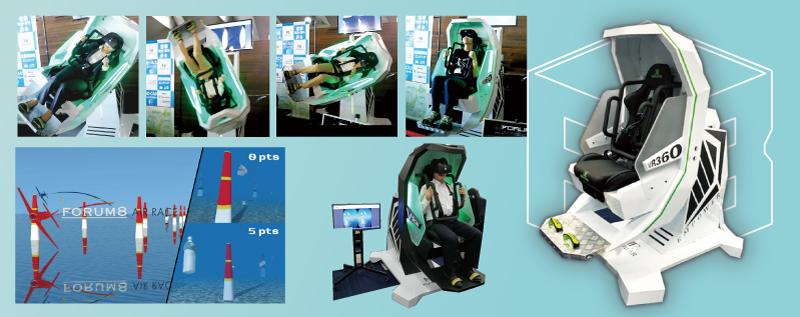
VR360°シミュレータ
-
ヘッドマウントディスプレイを装着し、ピッチ、ロールが可能な座席に座り、ダイナミックな動きを体験できるシミュレータです。ローリングは左右それぞれ最大360度回転します。
コンテンツ事例
「UC-win/Road」で構築したデジタルツイン空間の中で、「エアレース体験」と「海中ごみ拾いSDGs体験」が可能です。
-
- 6DOF
車両走行中に基本的なダイナミックスの表現が可能 - Yaw-Table
交差点、急カーブなど回転時の動きが表現が可能 - Vibrationシステム
異なる路面上で走行する時の違いを細かい振動で表現 - マルティチャンネル投射システム
エッジブレンディングを用いて360度で車両走行のシミュレーション環境を提供 - バーチャルリアリティ制御ユニット
UC-win/Roadより、3次元の道路モデリングと交通シミュレーションが快適に行える。 - X-Table
長距離直線運動システム。長距離加速する場合の遠心力をドライバーに伝える。 - 6DOFモーション
全体的にX-Tableのレールに沿って直線方向に動く。車両ダイナミックスの計算より走行中車両の姿勢を忠実に再現するため、Pitch、Roll、Yaw、Sway、Surge、Heaveという6つの方向に組み合わせた動きが可能。 - Yaw-Table
6DOFモーション構造と車両キャビンの間に設置され、交差点と急カーブのところで曲がる時に車両本体が回転 - Vibration
Yaw-Tableと車輪の連結部分に設けられ、車両が材質の異なる路面上を走る際の高周波数の振動表現が可能。
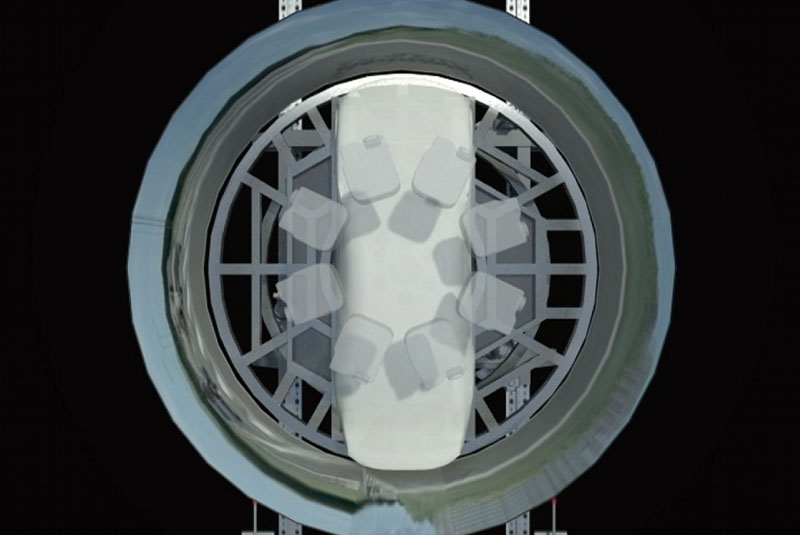
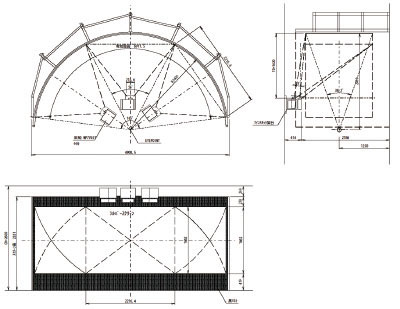
6軸+Yaw・Xテーブルおよび全周囲8プロジェクション・クラスタ構成
●概要
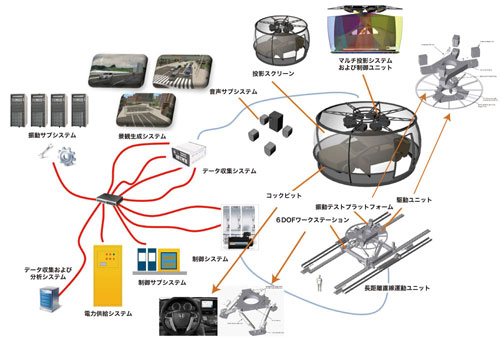
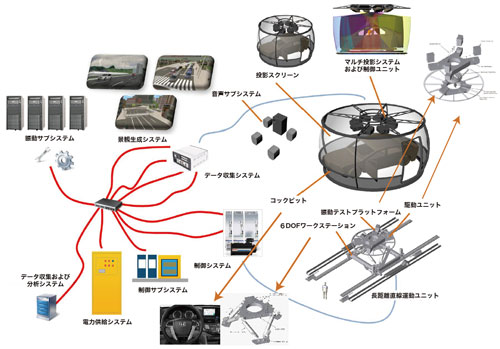
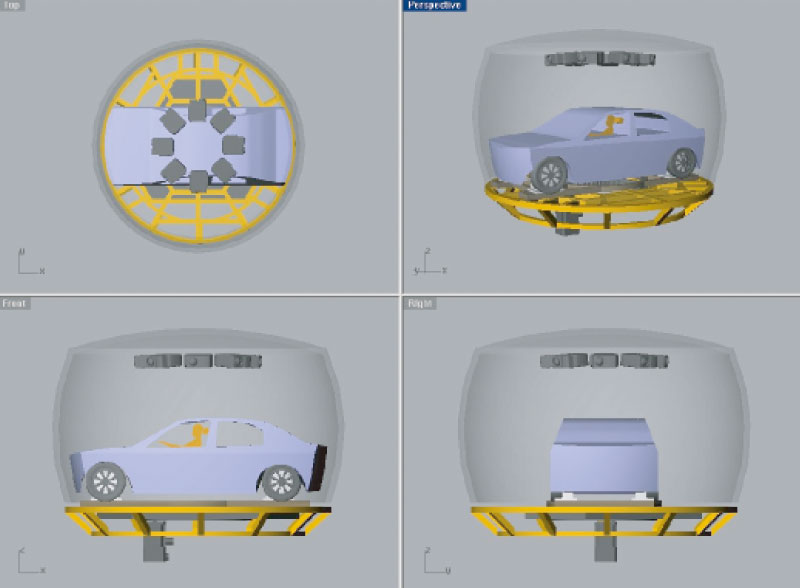
6DOF、Yaw-Table、Vibration、X-Table、キャビン、マルチチャンネル投射システム、音声システム、電源システムとその他のサブシステムより構成される、研究型8DOF交通安全シミュレーションシステム。
その他の特徴として、5.1チャンネル音響システムにより車両走行中の各種環境音をリアルに再現。車両キャビンをカバーするためのドーム構造は硬くて軽い材質を使用しており、プロジェクターをサポートすると同時に、コックピット内の温度調節など、快適なドライビングシミュレーション環境を確保。車両コックピットは前後一部カッティングされたホンダアコードより改装され、本格的な運転が体験できる。

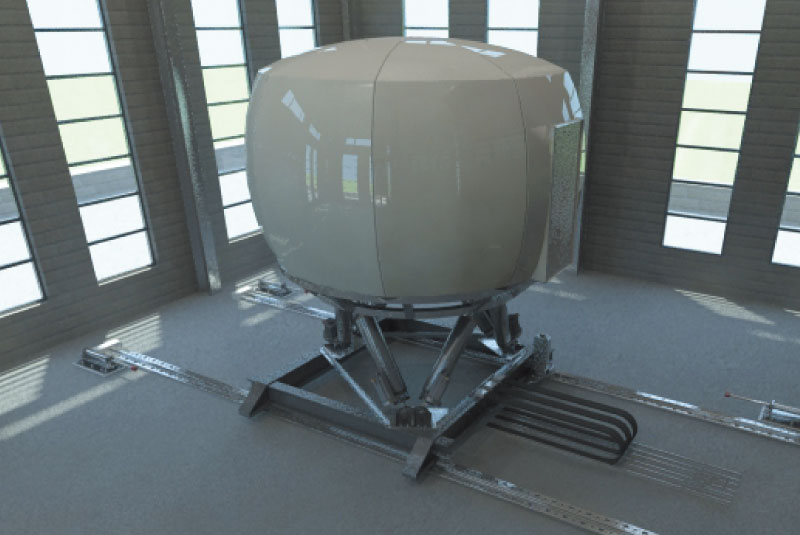
●モーションプラットフォーム
X-Table、6DOF、Y-TableとVibrationより構成される。
その他、車両のキャビンについては、エンジン部分は取り外され、かわりに電子制御システムや音響PCなどを装備し、内部にパソコン用電源とインターネット接続用の接続端末が用意されている。リアルな運転感覚を維持するためハンドル、アクセルおよびブレーキは実車部品のまま使用。




▲8DOF ドライビングシミュレータ
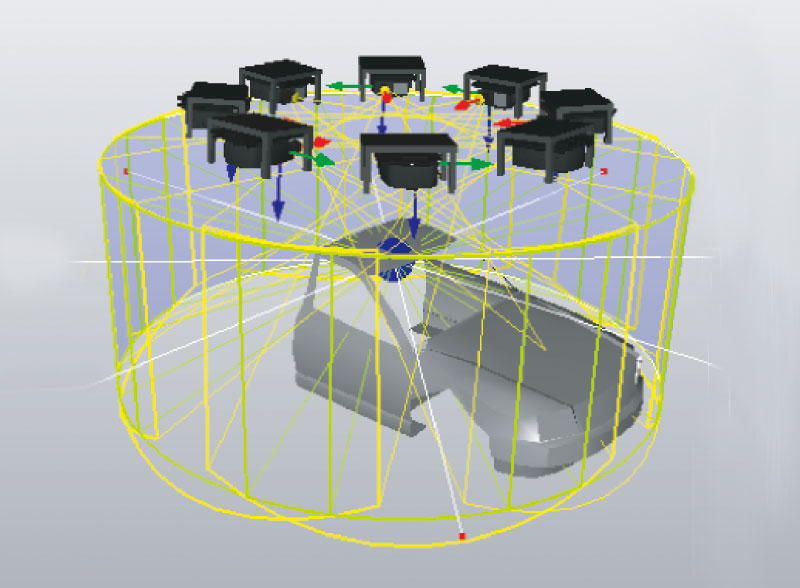
●投射システム
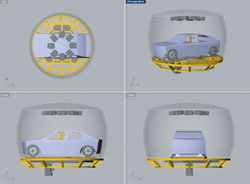
ドームの中で8台のプロジェクターが設置され、エッジブレンディングの処理を行った上で360度スクリーンにリアルタイムな走行シミュレーションを投影。プロジェクターの向きや投射角度は、専門のコンサルタントよりシミュレーション検証を行った上で設計され、ドライバーの目線には支障にならない構造となっている。
システムコンポーネント 1 6DOFモーションプラットフォーム
6DOF Motion Platform6-DOF Motion Platform
Bosch Rexroth EMotion-4000-6DOF-700-MK22 回転テーブル
Yaw TableYaw Table
Yaw table for E-Motion 40003 モーションプラットフォーム
Vibration Test PlatformVibration
Bosch Rexroth E-Motion4000 Vibration4 マルチチャンネル投影システム
Multi Project SystemBARCO SIM5R 5 ドーム&スクリーン
Projection ScreenInnosimulation Order Made Dome structure and screen 6 長距離直線テーブル
X Axis TableBosch Rexroth Order Made Long excursion
1(one) axis motion table7 音声システム
Sound Sub SystemInnosimulation Order Made Audio
Subsystem8 車輌コックピット
CabinHonda Accord 9 電源システム
Power Supply SystemBosch Rexroth Order Made Power Supply Subsystem 10 サブ制御システム
Control Sub SystemControl System DELL Precision T3400

- 6DOF




UC-win/Road 自転車シミュレータ
-
▶Up&Coming 103号 ユーザ紹介 : 株式会社フローベル 応用システム開発グループ
cycleStreet シリーズ City Edition
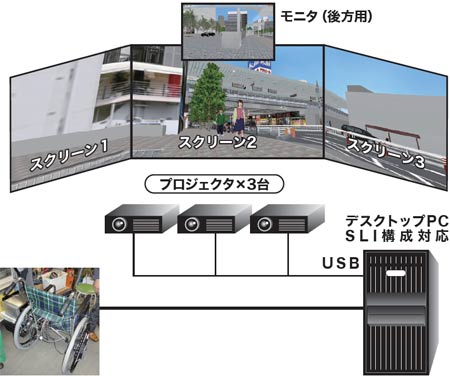
エアロバイクを用いて、その中に独自に開発した速度センサーを組み込み、そこから回転数を読み取るDLL(ダイナミックリンクライブラリ)を接続。これに、UC-win/Roadで作成したVR・CGの3画面パノラマ表示がリンクしている。システムのサンプルコースは、フォーラムエイトが作成した渋谷駅を中心に一周する内容のデータを活用。体験者がエアロバイクのペダルを漕ぐと、速度に応じてCGが動き、都心のサイクリングをゲーム感覚で楽しみながらエクササイズできる仕組みを実現している。

▲UC-win/Road を導入したcycleStreet シリーズCity Edition

▲UC-win/Road で渋谷の街並みが再現されている

▶Up&Coming 91号 ユーザ紹介 : 徳島大学 大学院 ソシオテクノサイエンス研究部
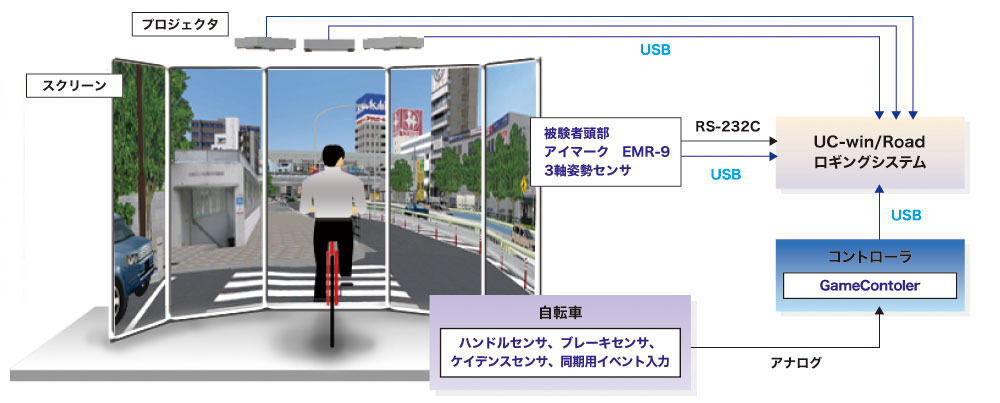
徳島大学大学院ソシオテクノサイエンス研究部(工学部建設工学科都市デザイン研究室)山中英生教授が指導する「交通チーム」では、利用者の視認特性に適した自転車用情報提示技術の開発へUC-win/Roadベースの自転車シミュレータを導入している。
各種サインのサイズや掲出間隔の違いによる見込み角、あるいは視認時間が自転車視認に与える影響を明らかにし、自転車利用環境に適した情報提示の基準となる知見を得ることが可能。また、アイマークレコーダーや頭部姿勢センサーとともに、多様な実験条件を構築することも可能。ドライブシミュレータを用いる実験システムを導入することで、自転車利用者の視認特性を明らかにしたうえで、自転車の誘導・制御に有効なマークセットの開発・検討や、道路づくりに活用することができる。

▲自転車シミュレータを使った実験の様子

▲FORUM8 デザインフェスティバル2011では開発賞を受賞
▲自転車シミュレータで有効性の確認が行われているサイン例

▲自転車シミュレータ構成イメージ





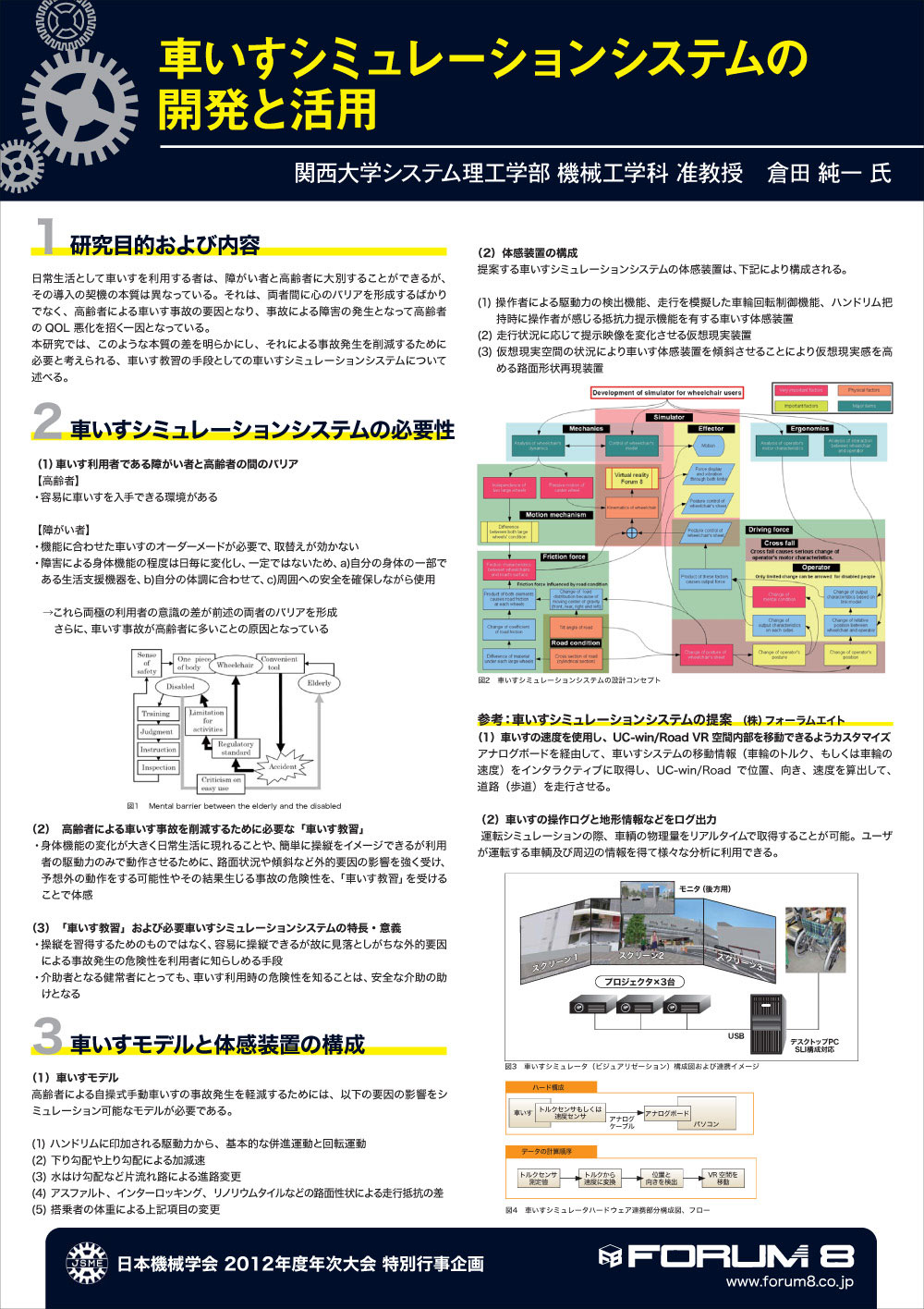
カスタマイズ:車いすシミュレータ(関西大学システム理工学部 機械工学科)
-
▶Up&Coming 91号 コラボレーションニュース紹介 : 関西大学システム理工学部 機械工学科
関西大学システム理工学部 機械工学科 倉田准教授の研究開発成果である車いすシミュレータの映像表示部分に、UC-win/RoadのVR環境が利用されている。
車いすシミュレータハードウェア本体に両輪別駆動のトルクセンサー付き車輪を実装して算出した車速、路面抵抗のモデルを車いすの運動モデル(ダイナミクス)として使用。表示部分にはUC-win/Roadを活用。また、車いすシミュレータからの実測値のデータをUC-win/Roadに読み込むことで、VR空間内を移動可能であるかについて検証を実施する。
個人の障害の程度や部位を考慮し、これからの電動車いすのあるべき姿と、車いす利用時の事故発生の危険性を認知して、より安全な利用が可能となるシステム。
▲車いすシミュレータ構成イメージ

▲車いすシミュレータ
ハードウェア連携部分構成図、フロー

▲UC-win/Road MD3キャラクタによる
車いす事例サンプル
▲フォーラムエイトでは、日本機械学会ワーク
ショップ(2012年9月11日)にて
「シミュレーション・システム・セッション」
を開催し、同大准教授の倉田氏も
「車いすシミュレーションシステムの開発と活用」
と題した講演を発表しました。



UC-win/Road 鉄道シミュレータ(鉄道運行シミュレータ)
-
▶Up&Coming 92号 新製品紹介 : UC-win/Road 鉄道シミュレータ提案
▶Up&Coming 79号 新製品紹介 : UC-win/Road カスタマイズシステム 鉄道シミュレータ
研究開発、教育・訓練、広報展示目的の鉄道運行シミュレータ
■さまざまな用途に対応
車両や人間工学の研究開発用、乗務員の教育・訓練用、博物館、鉄道展等での運転体験用、列車運転ゲームなど。
■大型から小型まで
実物大の乗務員室、広視界画面、動揺装置を備えたフルキャブタイプ、運転コンソール部分のみの簡易型、PC画面への表示など。
■CG映像と実写映像の両方に対応
運転自由度の高いCGとリアリティに優れたビデオ映像とを用途に応じて使い分け。
■臨場感の高い模擬環境を生成
高画質・高速描画の模擬視界発生、マルチチャンネル・マルチスピーカーによる音響、加減速の体感を与える動揺装置。


▲小型運転シミュレータ
▲鉄道乗務員の教育・訓練を目的としたシミュレータシステム構成

▲VR

▲実写映像

▲大型鉄道シミュレータ(イメージ図)
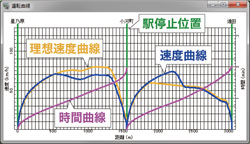
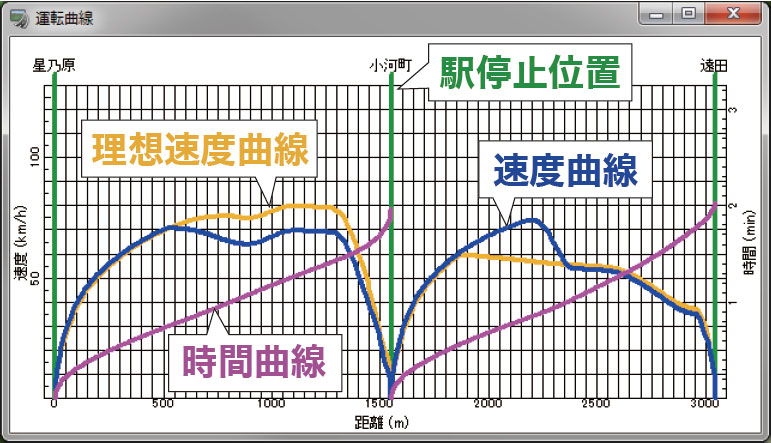
運転曲線機能
運転曲線は、列車の走行位置の変化と速度および時間を継続的にグラフ化したものです。鉄道においては運転曲線図を作成することにより駅間の運転時分が定まり、効率的な運転計画(ダイヤグラム)を立てることができます。
●速度曲線
速度曲線(青色)は、縦軸が速度、横軸が距離を表した曲線です。速度曲線を参照すれば、どこで加速し、どこでブレーキを掛けたのが一目で判ります。この駅間の理想となる速度曲線は(黄色)で表されます。多くの理想速度曲線は無駄な加減速がなく、省エネ運転になっています。
●時間曲線
時間曲線(ピンク色)は、縦軸が時間、横軸が距離を表した曲線です。発車から次駅までの所要時間が一目で判ります。UC-win/Roadの鉄道シミュレータでは、列車が5m進む毎に速度と時間を記録、描画を行っています。運転曲線画面は、透過できるようになっており、運転画面に重ね合わせて表示させることも可能です。画面サイズも任意に変更できるので、1つの画面で運転したい時に画面の隅に置いておくのに便利です。また、自身の運転情報を記録することができます。記録されたデータを表計算ソフト等を用いれば、手元でグラフを見ることもできます。



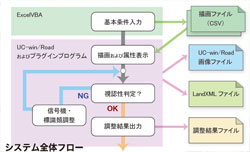
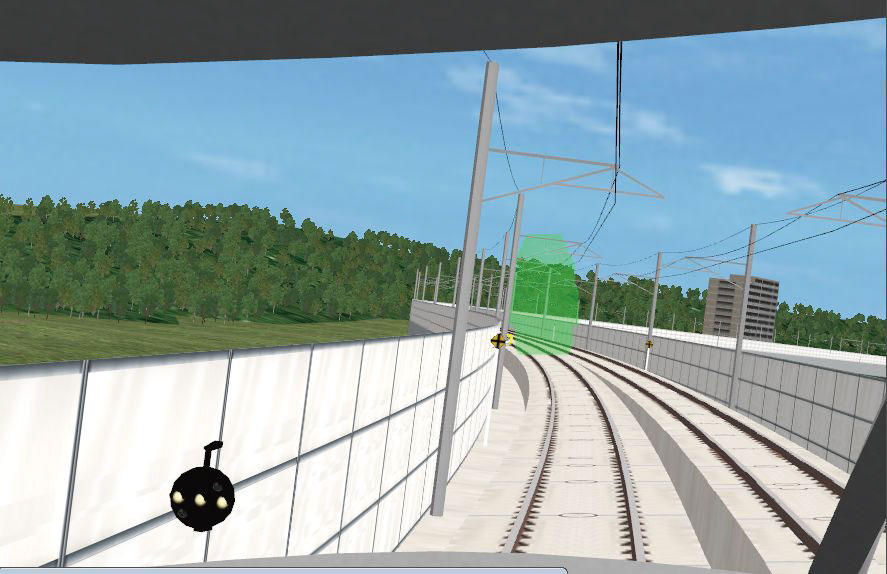
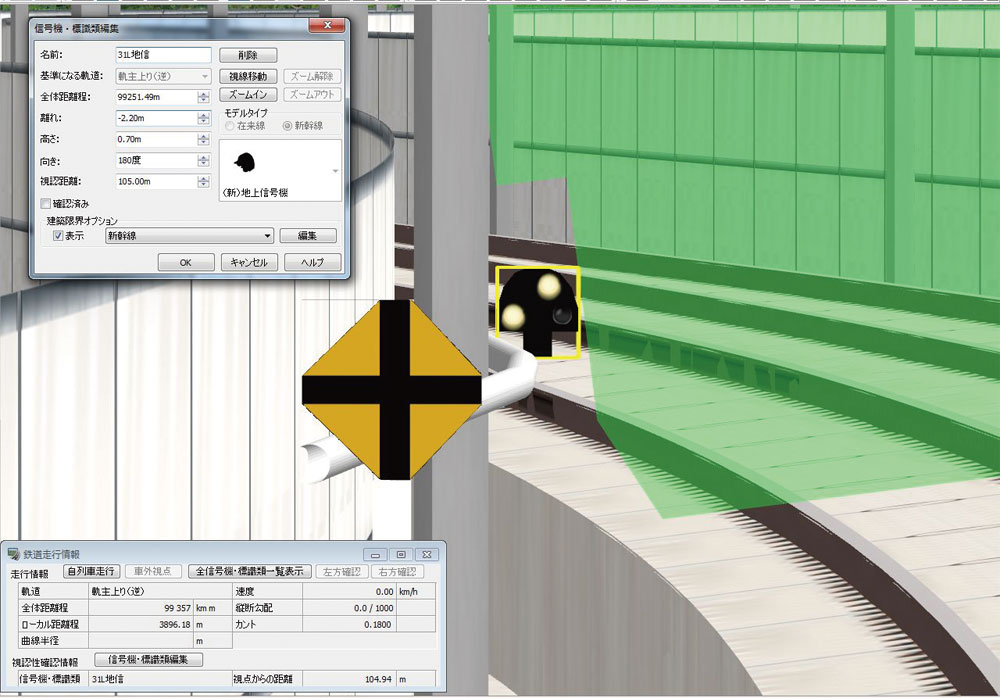
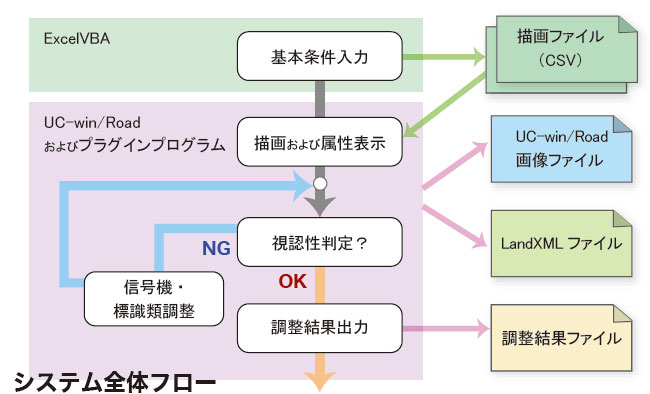
UC-win/Road 運転設備設置位置検討システム
-
●独立行政法人 鉄道建設・運輸施設整備支援機構殿受託開発 平成22年度納入
●鉄道線路の新設・改良にあたり、乗務員等からの信号機標識類の視認性を施設の設計段階で確認することができます。
▲自動停止

▲接近表示
▲位置調整
第10回 3D・VRシミュレーションコンテスト・オン・クラウド GRAND PRIX
「運転設備設置位置検討システム」
独立行政法人鉄道建設・運輸施設整備支援機構

-
バーチャルリアリティによる船舶操船シミュレータ
UC-win/Roadの多様な3D/VR空間表現を活用した船舶操船シミュレータは、VR空間を容易に精度高く表現できるとともにドライビングシミュレータで培ったシナリオ・イベント機能やモーションプラットフォーム技術を活用して多様な要求に応えるシミュレータの構築が可能です。
船員訓練や学生教育ばかりではなく、港湾施設のシミュレーション、様々な港湾環境の景観評価などにも活用をご提案できます。
デモシミュレータ 主要内容
・小型デモ用シミュレータ (UC-win/Road含まず)
・展示、案内用コンパクトタイプ
・Start/Stopボタン
・ハンドル、アクセル、ブレーキ実装
<建設重機関連>
建設重機の透過表示コックピットシステム NEW!
-
- 発光体設置間隔4mmの透過型LEDフィルムディスプレイにより、重機正面において約150x150のピクセル数で映像を表示。
- 最大輝度1,200cd/㎡で映像を表示し、真夏の日中でも運転席から映像を視認可能。
- 視線位置計測システムSmart Eye Pro DX(株式会社東陽テクニカ)との連動で、重機オペレータの視線位置に応じた映像を表示。
- 運転席正面ディスプレイには3次元設計データ、側面ディスプレイにはアームで隠れた部分の背景を光学迷彩として重機オペレータの視線上に重ねて表示。
- バックホウ用3次元マシンガイダンスシステムiCon_iXE3(ライカジオシステムズ株式会社)との連携により、システムに登録した任意の3次元設計・施工データを表示。また、iCon_iXE3とセットで設置することで、既存のバックホウへの設置も可能。
- ラジコンバックホウで動作する室内シミュレータにより、展示会等で体験可能。
株式会社竹中土木、加賀電子株式会社、イマクリエイト株式会社との共同開発による、建設重機を対象とした透過表示コックピットシステムです。
本システムは、竹中土木と株式会社Delight Globalの共同開発による、従来の透明ディスプレイ製品と比較して高輝度での映像表示が可能な透過型LEDフィルムディスプレイを利用。これにより、明るい日中でも表示映像を視認しやすくなり、運転者が3次元設計データを目視しながら簡単に重機を操縦できることに加えて、側面ディスプレイの映像で重機アームにより隠れた部分も視認できるようになるため、ミスの低減や旋回時の安全性向上につながります。
フォーラムエイトでは、UC-win/Roadを制御ソフトとして、3次元マシンガイダンスシステムによるバケット刃先位置と重機位置の取得と、視線計測システムによるオペレータの視点位置を3DVRデータと連動させ、それぞれを正面ディスプレイへの表示に反映させる部分のシステム開発を行っています。また、ラジコンバックホウで動作する室内シミュレータにおいて、取得したラジコンの位置データを3DVRデータと連動させディスプレイに表示に反映する部分についても、対応いたしました。
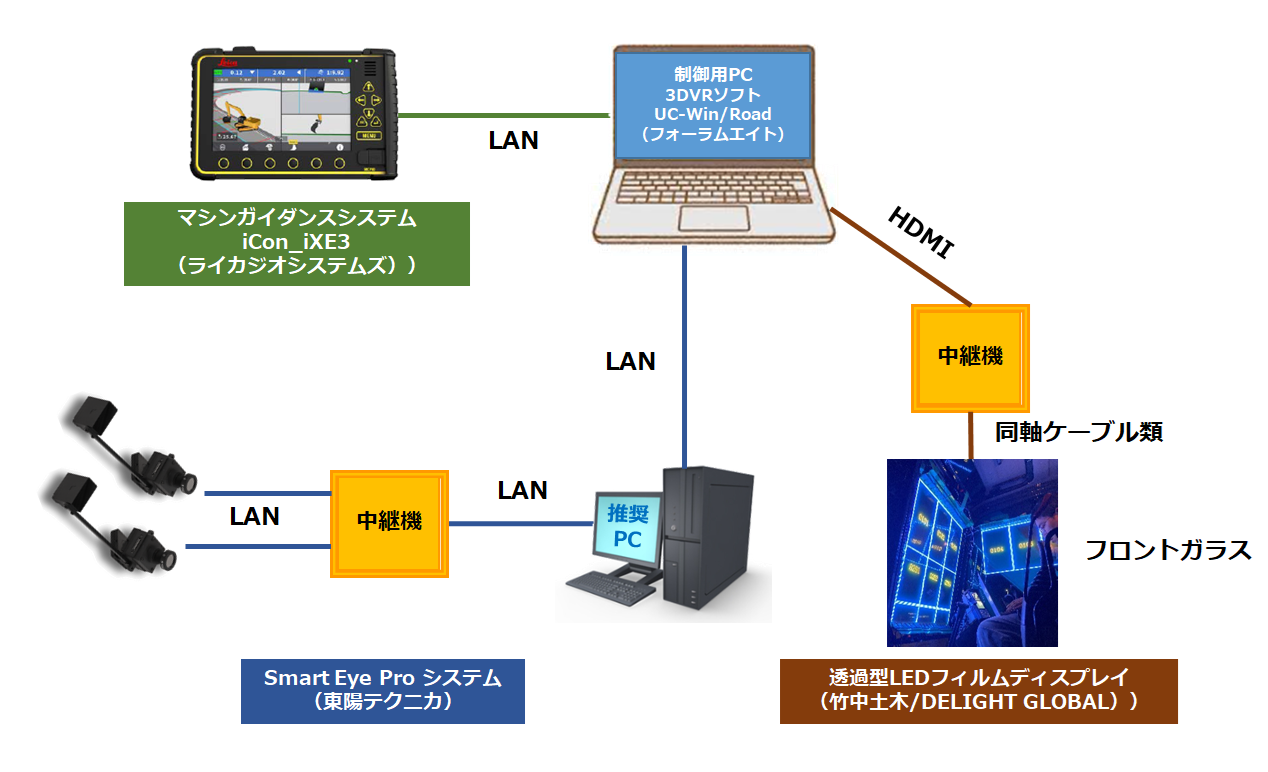
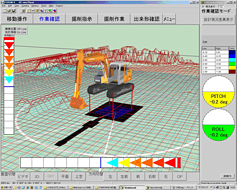
▲3次元設計データ表示システム構成


▲室内シミュレータ

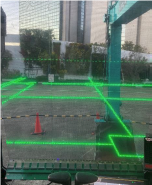
▲操縦席からのディスプレイイメージ写真(左:夜間/右:昼間)
▲ディスプレイ表示シミュレーションの様子
【システムの特徴】
施工機械マンマシン・インターフェイス
-
▶Up&Coming 73号 新製品紹介 : UC-win/Road カスタマイズシステム
ロボット施工を目指して
(独) 土木研究所技術推進本部との共同研究 (平成19年度、機械化施工における情報化施工研究)
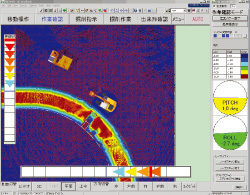
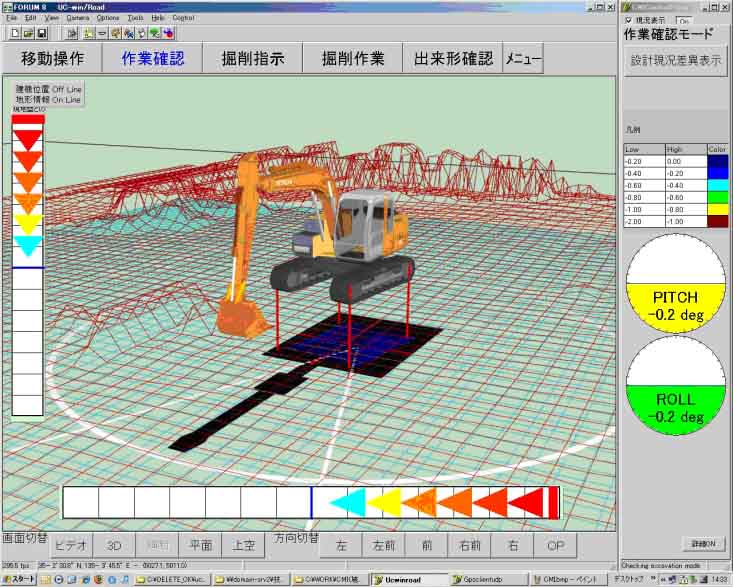
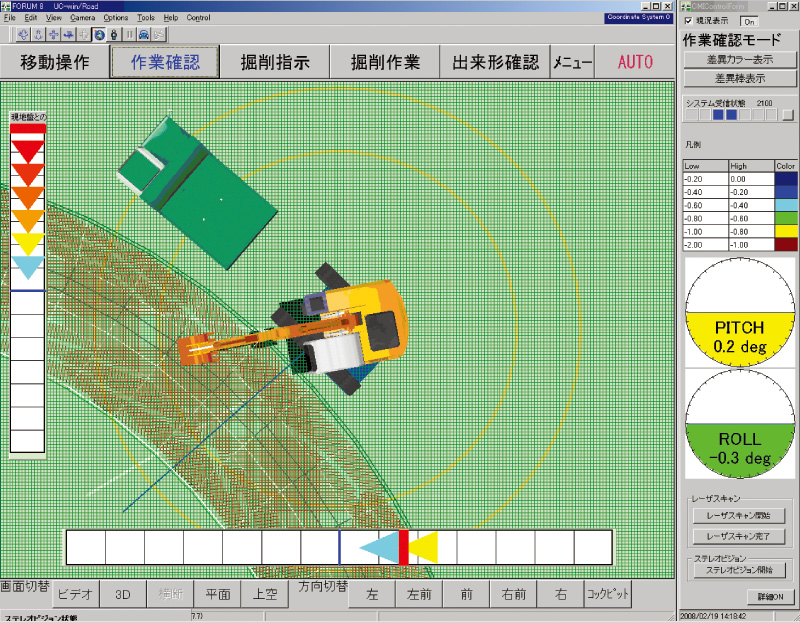
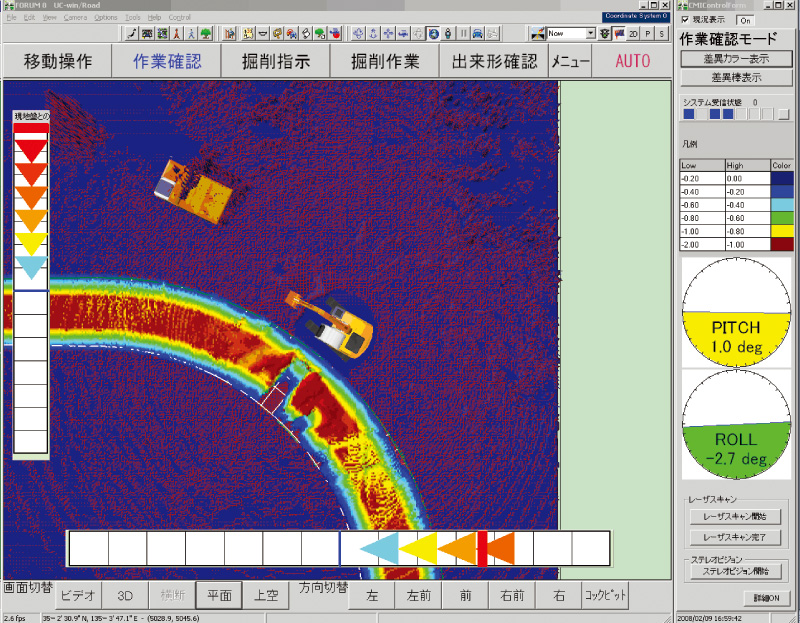
本開発は平成19年度、機械化施工における情報化施工研究の一環として独立行政法人土木研究所技術推進本部様との共同研究として行われたもので、現在でも進行中の研究テーマです。
危険区域内における無人化遠隔操作において、掘削精度・掘削作業の効率を確保するためには、建設機械の作業状況を正確、且つリアルタイムにオペレータに伝えるインターフェイスの良否が常に問題となってきますが、本システムでは、オペレータ側のインターフェイスにUC-win/Roadを採用し、3次元VR上でリアルタイムに作業状況の確認と作業指示を行うための表示、及び操作機能の開発・実装を行い、現場実験を行って確認を行っています。


<その他>
-
▶Up&Coming 89号 新製品紹介 : UC-win/Road for RoboCar(R) Ver.2 for AURELO (オレロ)
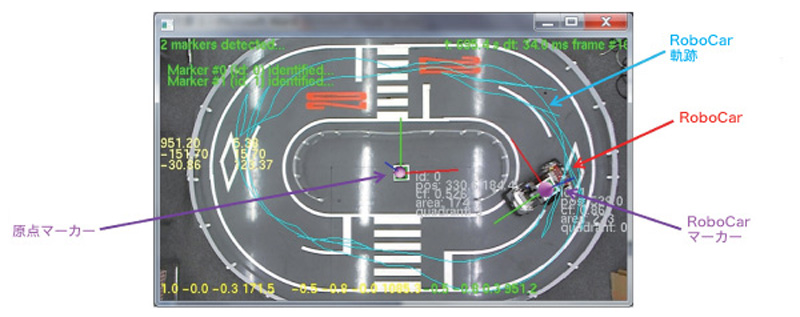
UC-win/Road for RoboCar(R) Ver.2 AURELO (オレロ) 対応版
車の縮小モデル(UC-win/Road for RoboCar(R))で自律走行。UC-win/Roadにより、実空間と3D・VRを連携させた運転・交通シミュレーションを行うことが可能です。
AURELO(オレロ)は、RoboCar(R)の絶対位置、方位を追跡するシステムです。ウェブカメラとマーカーを使用し、リアルタイムで測定を行います。
拡張現実位置決定システム(AUgmented REality LOcalization System)により、同時に複数のマーカーをトラックすることができます。各マーカーは同じ境界(黒い四角形)を示し、黒い四角形内のパターンに基づいてマーカーの識別が行われます。使用したARツールでは、カメラ参照フレームと相対的な各マーカーの変換マトリックスのみを識別することができます。その結果、RoboCar(R)コースの上部にあるカメラを用いて、2つのマーカーで現実のRoboCar(R)絶対位置情報を追跡することが可能です。
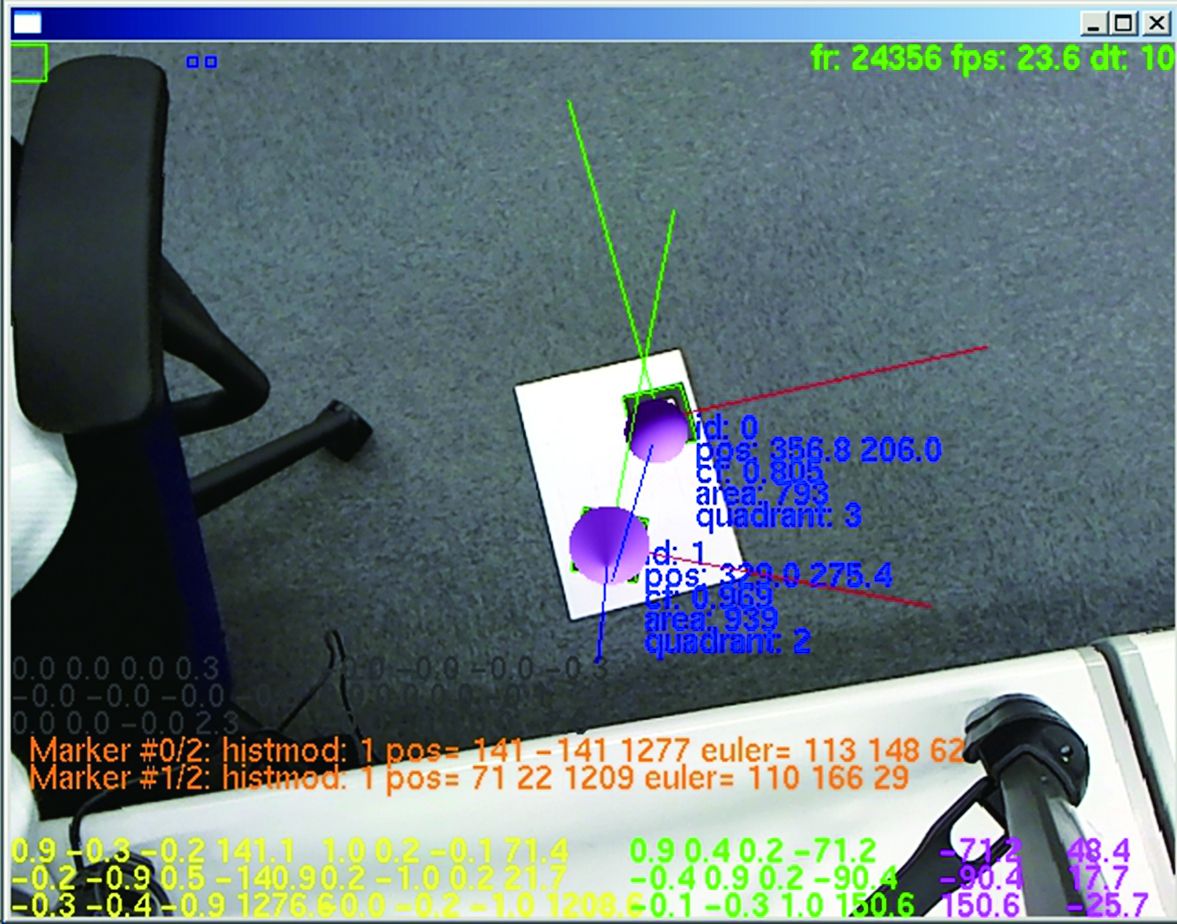
▲AURELOを用いた
2つのマーカーの3D位置特定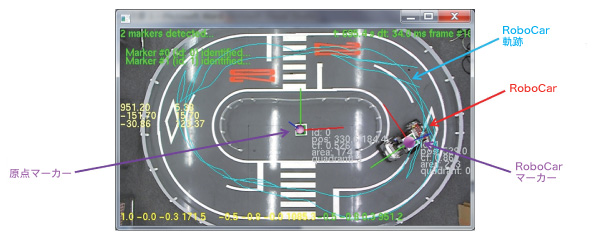
▲AURELO上面ビュー
各種シミュレータ構築提案
-
簡易型DS
■国土交通省四国地方整備局 松山河川国道事務所 2005年
■先端技術館@TEPIA(機械産業記念事業財団) 2008年
■建設技術展示館(国土交通省関東地整) 2007年
■首都高速道路(株) 大橋JCT開通前の体験(目黒さくら祭り) 2009年
■トヨタオートサロンアムラックス東京ショールーム 2011年

▲先端技術館@TEPIA、2008年

▲トヨタオートサロンアムラックス東京2011年
3DステレオDS
■はまぎん子供宇宙科学館(企画展「3D!脳と目のびっくり展」) 2009年

3Dステレオビューのシステム構築例
UC-win/Roadによる3x2偏光立体視DSシステム。シルバーシンドリカルスクリーン(R2400,165度、H1662)天吊り架台、偏光フィルター取付ホルダー


製品価格
本体価格
-
価格は税別表示です
■本体価格
製品名
価格
スイート建設会計 ¥250,000 スイート建設会計 Pro (無償保証5年) ¥600,000 スイート給与計算-出面管理- ¥250,000
※初年度サブスクリプション契約は新規価格に含まれます。
※レンタルライセンスは通常製品同様の提供となります。
※ライセンスは入力無制限ですが、出力はライセンス数のみになります。サブスクリプションサービス 契約価格
サブスクリプションサービス 契約価格
-
■サポート内容
・バージョンアップ無償提供 ・電話問合せテクニカルサポート
・問合せサポート(電子メール、FAX) ・ダウンロードサービス ・保守情報配信サービス※ライセンス管理コスト削減、製品ご利用形態ニーズ多様化への対応を充実させることを目的として、従来の保守・サポート形態からより便利な、「サブスクリプションサービス」へ順次移行いたします(2016年4月1日~)。
価格は税別表示です
対象製品 初年度 1年 スイート建設会計 無償 ¥100,000 スイート給与計算-出面管理- ¥100,000
レンタルライセンス価格
■レンタルライセンス:短期間での利用により、低廉な価格でのライセンス利用が可能
■レンタルアクセス:既に購入済みの製品の利用ライセンス数を増やす事が可能です。事前契約により、レンタルライセンス期間(1ヵ月~3ヵ月)の単位で自動的にライセンスが付与されます。利用実績に応じて後日請求いたします。事前申込価格として、レンタルライセンス価格の15%引きとなります。ユーザ情報ページにてお申込みいただけます。
※サービス強化、利便性向上を図る目的で「レンタルライセンス」を2007年9月3日より提供を開始しました。
※レンタルライセンス開始後の期間変更は出来ません。期間延長の場合は再申込となります。
レンタルライセンス
-
価格は税別表示です
■レンタルライセンス
対象製品 1ヶ月 2ヶ月 3ヶ月 6ヶ月 スイート建設会計 ¥75,000 ¥100,000 ¥120,000 ¥150,000 スイート給与計算-出面管理- ¥75,000 ¥100,000 ¥120,000 ¥150,000 バージョンアップ開発履歴
バージョンアップ開発履歴
-
■バージョンアップ、リビジョンアップ(無償保守)の主な内容を一覧にしています。
旧版改訂、リバイバル版リリース時などの場合にご参考ください。価格は税別表示です
スイート建設会計 バージョン リリース日 主なバージョンアップ内容 1.0.0 18/02/28 新規リリース。
スイート給与計算-出面管理- バージョン リリース日 主なバージョンアップ内容 1.0.0 19/04/01 新規リリース。
建設業ユーザ様向けに、「スイート給与計算」に以下の機能を追加- 人件費の直接費管理が可能(作業現場日数の管理)
- 出面管理(労務日報入力、現場管理、タイムカード機能連動)
動作環境
動作環境
-
対応OS(推奨ブラウザ等) 推奨ブラウザ:Internet Explorer 11、Microsoft Edge(最新版)、Google Chrome(最新版)
対応OS:上記ブラウザの対応OS推奨環境 CPU、メモリおよび必要ディスク容量:上記ブラウザの動作環境に準ずる
ディスプレイ解像度:SXGA(1280×1024)以上
製品購入/お問い合わせ窓口
製品購入/お問い合わせ窓口
-
■FORUM8 オーダーページで購入
製品購入 - オーダーページ にて、バージョンアップ・新規製品・各種サービスの御見積作成・申込・決済ができます。
クレジット利用や、分割払いシステムでの購入も可能です。
ご質問は、バージョンアップセンタ(vc@forum8.co.jp)までお気軽にお問い合わせ下さい。


LOADING