 |
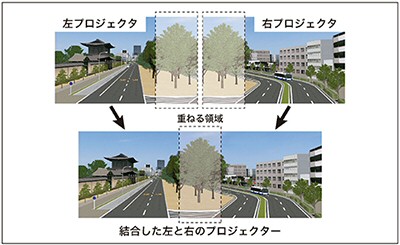
| Figure 1 Problem of overlapped area with multi-projectors |
To deal with this problem, although the conventional edge blending was conducted by gradually lowering the brightness to the uniform brightness distribution by using the specified graphic card (however with the limited the number of video output), UC-win/Road Ver.9.1 has been developed to be able to conduct the soft edge blending to do this processing without using the special hardware.
In particular, the digital filters are added to the output image and then the graduation processing to gradually lower the brightness of overlap area is conducted (Figure 2). This enables to display the overlap area in the uniform brightness even if the images of projector is overlap.
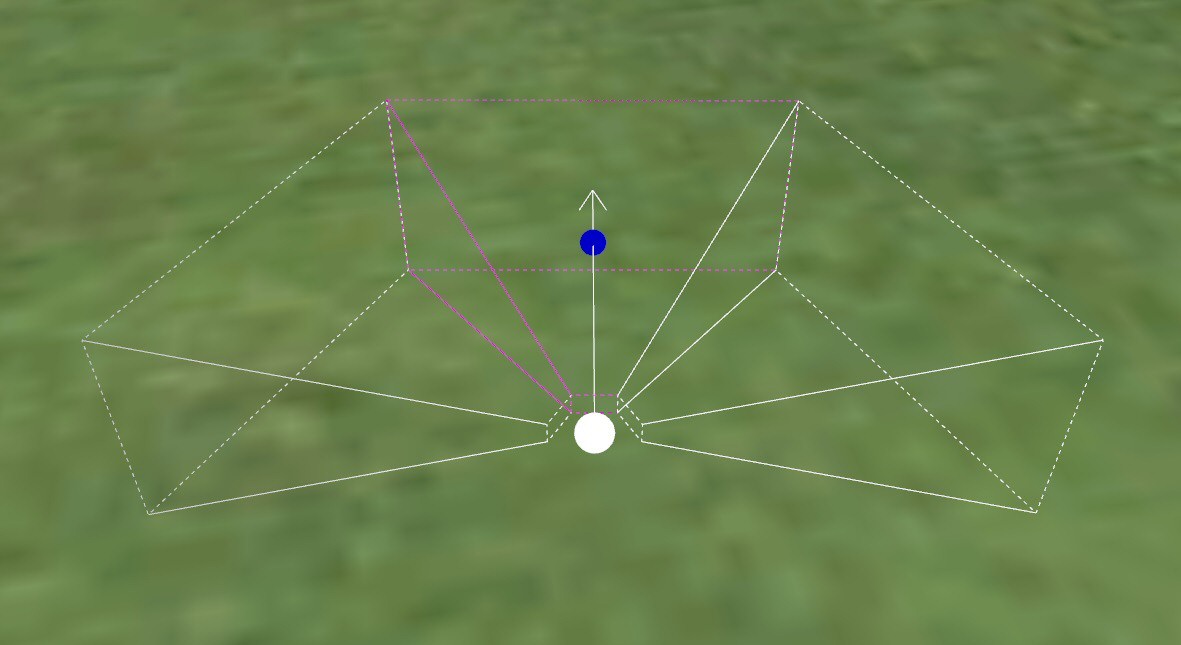
Moreover the projector can be supported for the various compositions including not only 2 projectors but also 6 projectors (Figure 3).
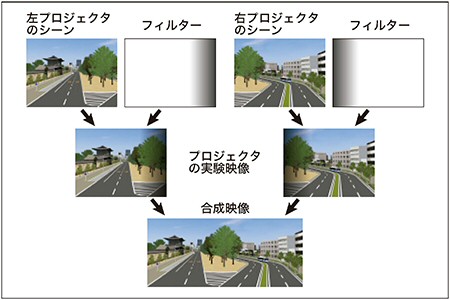 |
| Figure 2 Digital Filtering |
 |
| Figure 3 Example of 6 projectors configuration |