| Support Topics / UC-win/Road |  |
|
| 设置硬件的注意事项 |
| Support Topics | ||||
|
||||
|
UC-win/Road可对应Kinect™,SENSO-Wheel等各种类型的硬件。这次将介绍这些硬件的注意点以及问题发生时的 处理方法等。请对照产品帮助一起来看下列介绍。 |
| Kinect™、Xtion |
|
Kinect™和Xiton是使用红外线镭射等传感器和VGA照相机以检测人动作的装置。可与UC-win/Road F8Kinect 插件并用,在这类机器前通过两手的运动,可构筑在UC-win/Road里进行驾驶操作的系统。 三维物体的变换(3D模型的读取) 购买前请确认F8 Kinect插件对应的机器。F8Kinect插件对应设备如下图所示(今后也将陆续更新)。
※1 Xbox 360 Kinect™包同捆时,另需Kinect™电源 /USB电缆。
关于安装 UC
-win/Road的安装程序里Kinect™传感器、Xtion PRO, Xtion PRO
LIVE用驱动器同捆。安装UC-win/Road时、在「设置插件」的选项中勾选「Kinect插件」根据以下顺序安装UC-win/Road,就
无需安装其他驱动程序。根据需要还可安装OpenNI和PrimeSense等的驱动程序。 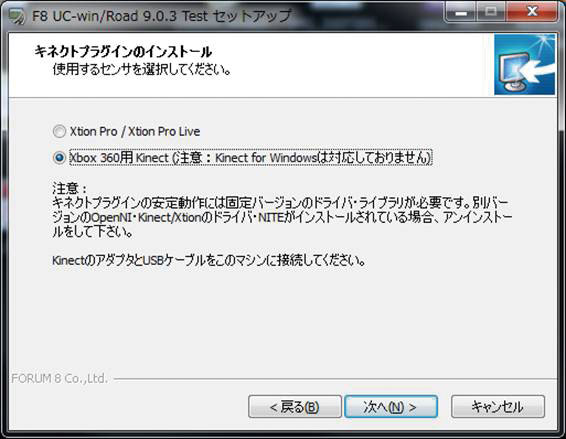 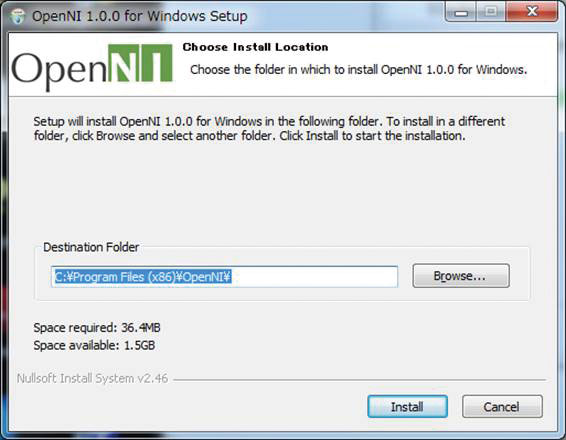 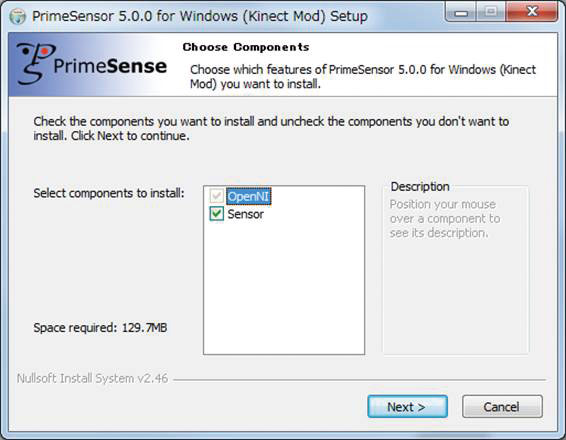 ■图2 各硬件安装画面 并且,还可能因为驱动程序版本的原因出现无法动作的可能性。必须使用与UC-win/Road本体同捆的安装程序。 出现报错时 可能是USB电缆的接续及 Kinect™传感器未与电源接续(Xtion PRO, Xtion PRO LIVE是USB式)。请确认接续状态。 无法操作 在Kinect 界面中可确认骨架的正确与否。可有效认知骨架包括头,肩頭、肩、肘、手首、膝、脚跟等关节。若不是这些关键点,则可在站立的状态下移动身体,向传感器认知 范围外移动,就可再度进行认知。并且还需注意裙子及反射率高的鞋子。在坐的状态下进行驾驶时,需注意手腕和脚的位置。从传感器中认知膝盖、手、肘需要注意 不能重叠。  ■图3 骨格的确认画面 |
| Oculus Rift |
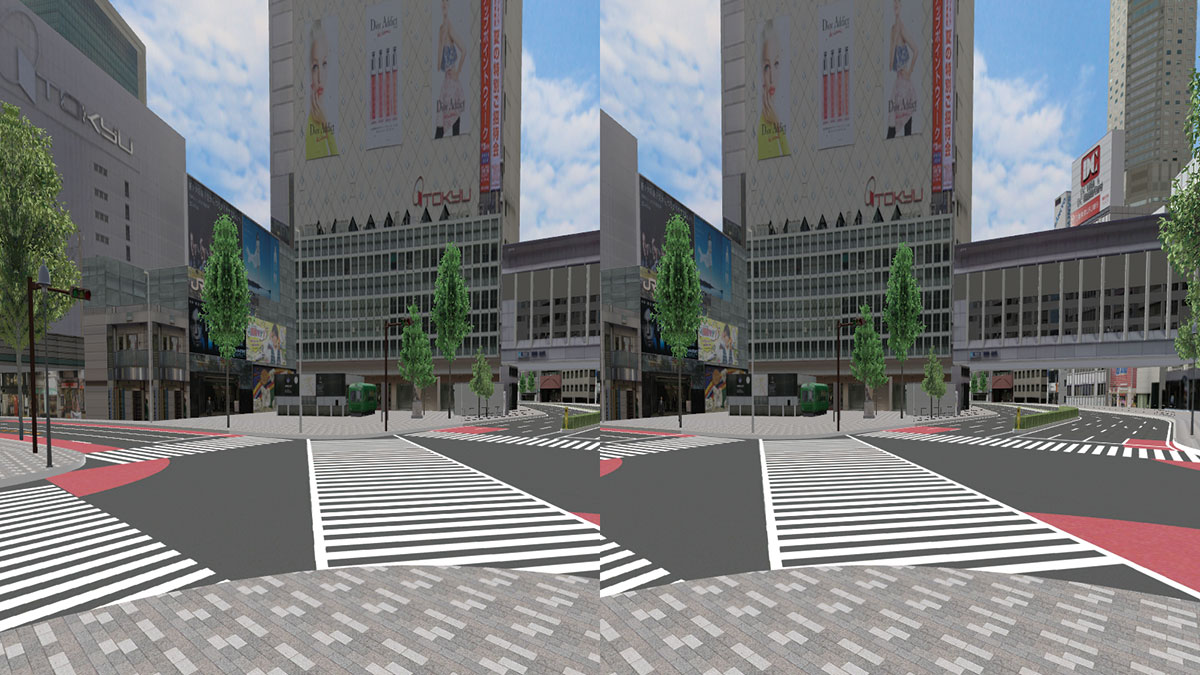
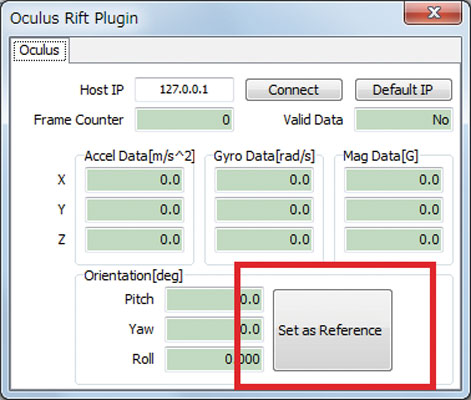
立体声功能的设置 Oculus Rift的三维影像使用并排方式,而「立体声功能」画面的表示方法用「立体声(side by side)」进行切换并进行三维表 示。 视角和焦点距离的设置 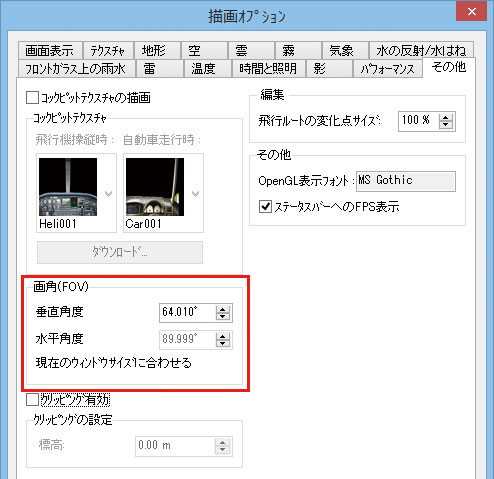 ■图5 水平视角设置画面 若要最大程度再现Oculus Rift的真实性,必须根据Oculus Rift的规格进行VR空间的投影。在进行适当的设定后,就可取得三维空间的沉浸感。 并且必须让Oculus Rift和UC-win/Road的视角相一致。 Oculus Rift DK1的水平视角为90°,因此可通过UC-win/Road的描绘选项画面的「其他」标签的「视角(FOV)」把水平直角设为90°。但是,在UC- win/Road当中输入的垂直视角与现在画面大小结合进行水平视角计算,因此需把窗口的分辨率定位 Oculus Rift相同的分辨率( K1:1280×800)并把可使水平视角变为90°一样设置垂直视角。 并且「立体声功能」画面的设定也很重要。两眼之间的间隔以人类平均值(65mm~75mm程度)设置。。焦点距离因为Oculus Rift左眼及右眼是独立的显示器构造,因此设置为最大值(500m)。设置完之后可取的最合适的临场感。 取得加速度传感器值 Oculus Rift通过USB进行驾驶时,在「Oculus Rift Plugin」画面上可表示头戴式显示器的内藏传感器的值。因此可掌握现在的驾驶员的头部方向移动。 校准 执行头部跟踪时,必须使用正面方向进行校准。并且,在Oculus Rift
DK1中持续动作之后会累积误差,因此需要定期进行校准。(现在开发中的DK2对应版本预计将解决此问题)。
|
| SENSO-Wheel |
SENSO-Wheel中通过设置摩擦力,弹性刚性,衰减力,可调整驾驶状态时方向盘的反作用力。并且,方向盘的轻重等可通过参数进行 调节。 方向盘SENSO -Wheel的中心位置发生偏差时,可使用「Offset设置」及「校准」进行调整。调整方法是,首先,在设置的中心位置回转方向盘。与中心位置结合的状 态下,点击 「Offset设置」,就可保存现在的Offset的位置。一旦把方向盘上的手放开,点击「校准」之后。Offset可以新的中心位置进行设置。 无法操作 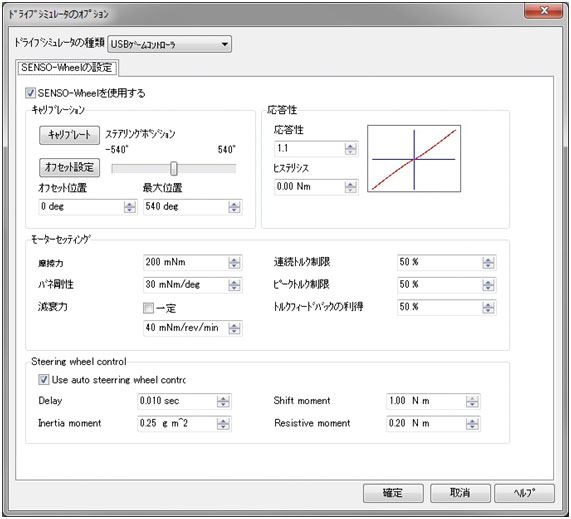 ■图9 DS功能的设置画面 SENSO -Wheel的CAN电缆通过USB进行变换(PCAN-USB)之后,应确认是否与PC接续。还应确认SENSO-Wheel的电源是否接续,电源开关 是否设为ON。之后,打开UC-win/Road的驾驶模拟器确认是否已勾选「SENSO- Wheel的设置」-「使用SENSO-Wheel」。点击这个按键之后,若出现「PCAN_Init Error」错误,有可能是SENSO-Wheel出现问题,请在确认一下接续状况。 |
| 显示器和视角的关系 |
|
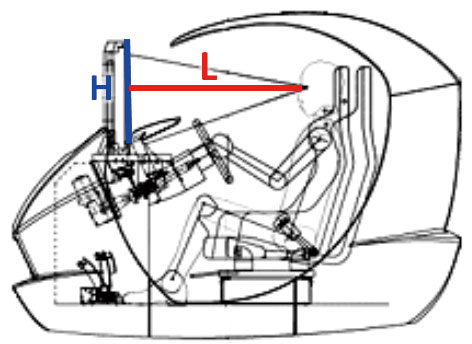
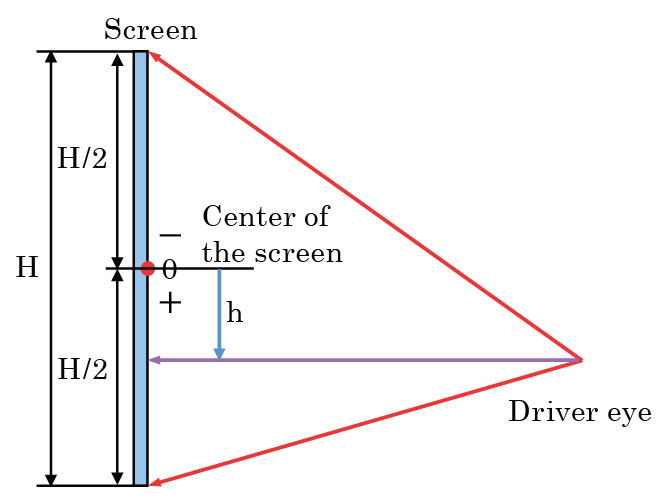
显示器(或者投影仪)的表示大小后,把显示器的距离和视角的关系设为最合适,可以在驾驶模拟时取得最适当的速度感和沉浸感。下列是视角 的计算式。
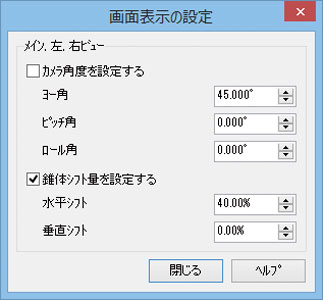
并且,若视点与显示器中心偏移时,进行考虑偏移量的VR渲染之后,可以表现更加真实的影像。视点的偏移量通过勾选菜单的
「视点」-「画面表示的设置」的
「设置椎体移动量」之后,可输入水平及垂直移动量。以下是移动量的计算式。
还同样可以算出水平方向移动量。因为纸面关系简单介绍照相机角度的说明。把视点和显示器的表示界面使用照相机角度进行设置后,可以创造 更加精确的表现效果。
|
|
|||
| (Up&Coming '15 新年号刊载) | |||
 |