 |
 |
| ▲그림1 VR-Cloud® | |
| New Products | |||||||||
|
|||||||||
|
||||||||||||||||||||||||||||||||||||||
| VR-Cloud®표준 지원 | ||||||||||||||||||||||||||||||||||||||
VR데 이터의 인터넷 공개, 협조 설계 또한 원격 회의를 목적으로 많은 사용자에게 사용하시기 때문에 VR-Cloud®의 서버 기능을
UC-win/Road의 Advanced및 Ultimate버전에 표준 탑재하도록 했습니다.작성 중인 프로젝트를 원격으로 원활하게
관계자에게 프레젠테이션 할 때나 Android단말로 많은 분에 보기 위해서 꼭 VR-Cloud®의 기능을 이용하세요.
|
||||
| UI의 개선 |
| 화면의 메뉴 스타일에 "리본"를 채용했습니다. 리본은 그동안의 메뉴, 툴바 대신 되는 것으로, 작업에 필요한 명령을 직감적으로 재빨리 찾아낼 수 있게 되고 작업 효율이 향상합니다. UC -win/Road의 리본에서는 "파일","홈","편집","뷰","서버","플러그 인"리본으로 구성됩니다.각 리본에서는 관계하는 기능을 집약하고 아이콘으로 나타냄으로써 지금까지 번거롭던 설정 화면의 표시 등이 보다 원활하게 하게 됩니다.
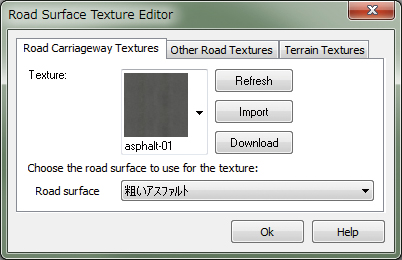
기 타 개선, 모델, 도로와 하늘 등의 텍스처를 사용할 때 텍스처용 폴더에 있는 파일을 변경한 뒤 UC-win/Road를 재기동하지 않고 바로 사용할 수 있게 되었습니다.또, 텍스쳐 선택이 가능한 전 화면 인터페이스를 통일시키고 이하의 기능을 전체 화면에서 사용 가능하게 되었습니다.
|
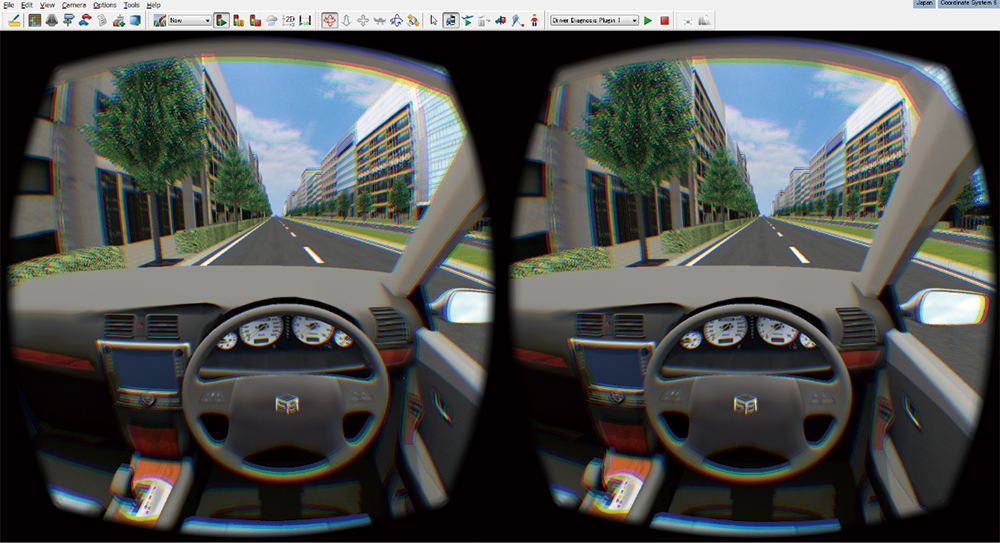
| Oculus Rift DK2대응 |
Oculus Rift는 미국 Oculus VR사가 개발한 밀폐형 HMD(Head Mounted Display)입니다.기존 HMD보다
넓은 시야각(대각선 110°)를 실현하고 있는 것이 특징이며, 본 기기를 이용함으로써 영상에 대한 몰입감·현장감을 부여할 수 있습니다.
입 체시에 좌우의 눈에 한, 시차를 고려한 다른 영상을 표시합니다. 또 눈의 지근 거리에 배치된 화면을 대형 화면, 광시얀 영상으로 보기 때문에 장착된 렌즈와 반대로 왜곡한 영상을 표시합니다.아울러 내장의 가속도 센서와의 연계도 하고 체험자의 머리 방향과 영상의 시선 방향이 동기 한 꼴이 되어 있으므로, 원하는 방향을 보면서 운전 시뮬레이션이나 워크 스루 체험을 실시할 수 있습니다. HMD는 일반 디스플레이보다 모델의 입체감과 거리감을 정확히 파악할 수 있으며 시뮬레이션의 가시화나 프레젠테이션 등에 매우 유효합니다. |
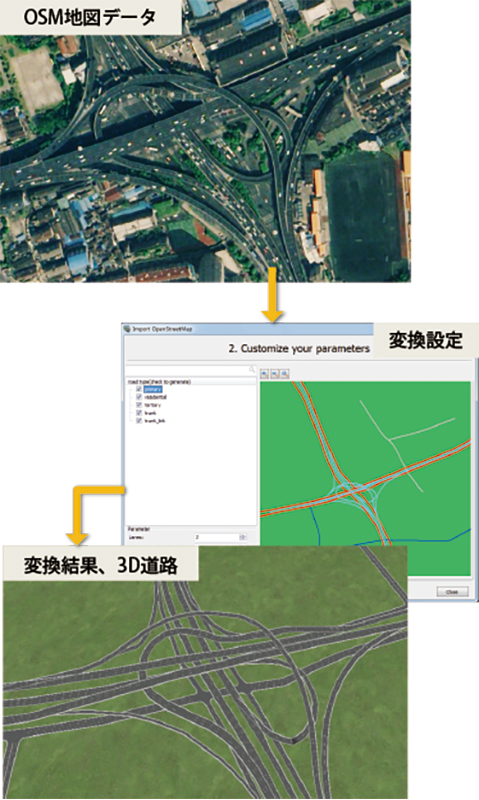
| OpenStreetMap대응 |
|
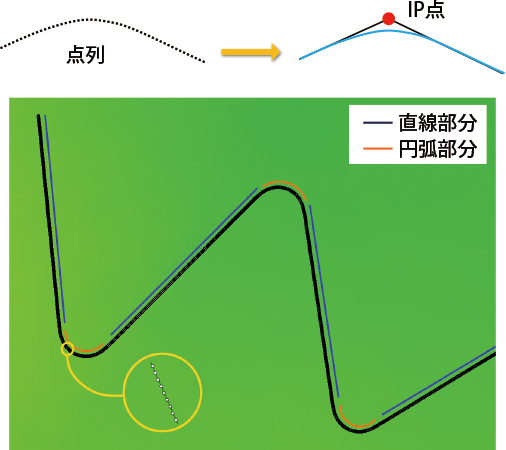
| 선형 산출 기능 |
|
| 3DS출력의 개량 |
| 3DS파일로 출력할 때 XML파일에 객체의 좌표 정보나 경관 설정을 출력하는 기능이 추가되었습니다. 출력한 3DS모델과 XML파일을 이용해서 다른 애플리케이션에서 자유로운 활용이 가능합니다. 또 새로 표시, 도로 표시, 배경, 전선의 객체의 3DS출력에 대응했습니다. |
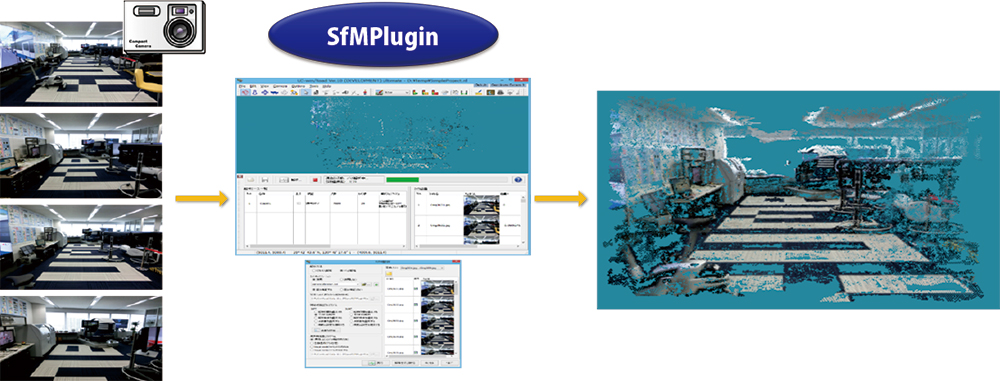
| SfM(Structure from Motion) |
| SfM(Structure from Motion)란 여러 사진에서 3차원 좌표 데이터(점군 데이터를 생성할 수 있는 기술의 총칭입니다. SfM에는 특별한 기기를 필요로 하지 않고, 일반적인 디지털 카메라로 사진을 촬영 할 뿐이므로, 간편하게 3차원 데이터의 작성이 가능합니다. SfMPlugin은 UC-win/Road를 이용하여 SfM해석을 수행하고 해석 결과를 UC-win/Road상에 표시 하는 플러그 인입니다. SfMPlugin의 사용 절차는 다음과 같습니다.
본 플러그 인의 활용처로서 차재 카메라의 영상을 이용하고 도로, 도로 구조물의 복원, UAV를 이용하여 복잡한 형상 또는 큰 건조물 복원 등을 생각할 수 있습니다.
|
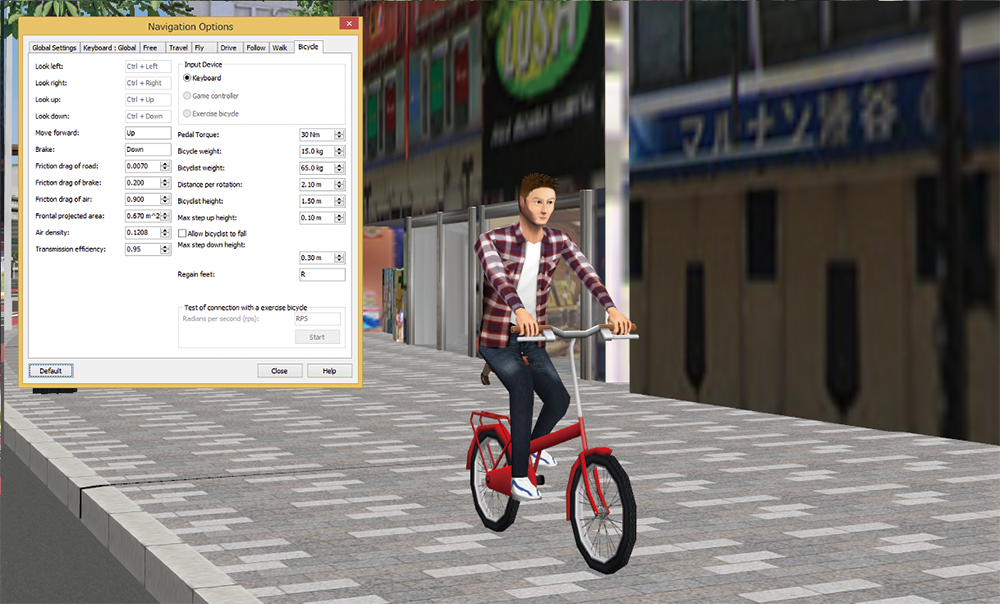
| 자전거 시뮬레이션 |
또, 로그 출력 플러그 인에 의한 로그의 출력에도 대응하고 있습니다. 시뮬레이션 중의 자전거의 위치와 기울기, 스피드 등의 정보를 출력할 수 있기 때문에, 연구 등에 도움 주세요. 또, 플러그 인에 의한, 플로우 벨 회사의 cycleStreet과 제휴하는 것이 가능합니다. PC와 연결된 cycleStreet의 페달을 밟음으로써 시뮬레이션 중의 자전거가 전진합니다.cycleStreet의 페달 회전수가 반영되도록 되어 있으므로 속도를 조절할 수 있습니다. |
| 레이아웃 엔진의 갱신 |
| 이번에는 이전부터 있는 그림자가 가시화 기능의 고속화 및 품질 개량을 실시했습니다. 일 조 시뮬레이션 뿐만 아니라 드라이빙 시뮬레이션과 실시간성이 필요는 시뮬레이션에서도 사용 가능하게 되고 입체감과 몰입감이 크게 향상합니다.또 성능 외에, 그림자의 샤프니스, 흐린 정도와 농도도 설정할 수 있게 된다, 맑을 뿐만 아니라 다소 흐린 상태에서 그림자도 표현 가능하게 됩니다 호수의 표현에 대해서도 물결 표현을 개선하고 텍스처 및 빛의 반사를 동적으로 계산함으로써 보다 리얼한 물의 표현이 가능합니다. 하늘은 미리 작성한 텍스처를 사용하는 방법과 함께 하늘의 모델화에 의해서 탁도(안개 상태)와 시각에 의존한 하늘빛을 계산하는 기능을 이용하게 되었습니다. 앞으로 구름의 모델화에 확장하는 것을 예정하고 있습니다. 내 부 레이아웃 엔진의 갱신을 하고, 확장성도 확보할 수 있었습니다. 베테의 화면 레이아웃 방법을 통일시키며, 선묘화 프로세스의 각 스텝의 커스터마이즈가 가능하게 나타납니다.장래 또는 SDK를 이용하여 각 묘화 스텝(통과)의 프레 포스트 처리를 추가할 수 있게 하고 어안 렌즈 효과와 안 비엥토옥루ー죠은과 에지 브랜드와 각종 마스크 기능 등이 더 쉽게 구현할 수 있게 됩니다.
|
||||||||||||||
| 마지막으로 |
| 이상 새 버전에 대해서 소개했다. 앞으로도 요망을 도입하고 개량·개선에 힘쓰겠습니다.아무쪼록 기대 주세요. |
| (Up&Coming '16 신년호 개재) | ||
 |