|
美国夏威夷州运输局为了有效管理全长5000km以上的高速公路从2003年开始引进机载雷达照相机(LiDAR)。该运
输局在FORUM8的帮助之下,把这十年当中通过测量计算得出的道路构造物的点云数据在UC-
win/Road当中进行统合并制作成有色点云数据。这使得道路管理变得更加先进。该运输局的高速道路调查工程师在今年7月8日夏威夷举行的国际VR
symposium第五届Summer Workshop中进行讲演,介绍了点云数据的着色中使用的FORUM8
Photo-log插件的相关情况。
 |
|
 |
| 夏威夷运输局的建筑物 |
|
瓦胡岛内的高速公路 |
夏威夷州运输局管理的道路包括瓦胡岛和夏威夷岛等6个岛屿,合计超过5000英里(约8000km)。为了管理广大范围并分散的道路,2003年开始使用车载式数码相机记录道路的状态的「PHOTO LOG」。
在记录当中使用的数码相机的像素正在逐年向高分辨率发展。2003年有1280×1024像素的照相机2台,2006年时有1600×1200像素的照相
机2台,2007年变为3台,2009年时有2048×1152像素的的照相机3台,在2011年时增加到3296×
2472像素的照相机3台。
随着照相机台数的增加和分辨率的提高,看板的细小污点等也可进行记录,摄影范围逐年扩大。
 |
 |
 |
照相机分辨率的
提高使诸如标识和看板的细小污点等也可进行记录。摄影范围逐年扩大。
(上图为2003年、下图为2009年的摄影范围) |
从2009年开始,使用车载式三维镭射扫描仪来计算及测量路面和道路周边的构造物等的形状。精度约为2cm左右。引进了「激光雷达(LiDAR:
Light Detection and Ranging)」。
搭载数码相机和雷达的车辆可在同一次的运行当中同时记录照片及点云数据。
 |
|
 |
| 激光雷达(左)
和车辆搭载示意图(右) |
2009年时使用此方法计算对瓦胡岛内的道路100英里(大约1600km)的道路进行测量。测量结果获得点云数据的容量大约为630GB,合计超过
2000亿点的膨大数字。数据形式是「(Mandli File
Format)」。使用此数据形式的理由是它适合路线数据,可在同一文件夹当中可包括路线全体。
2011年的夏威夷岛也同样使用雷达进行点云计测。
 |
| 2009年瓦胡岛内测量大约1600km的范围 |
 |
|
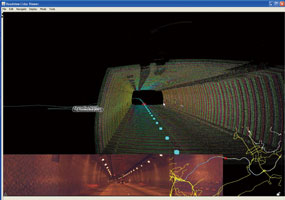 |
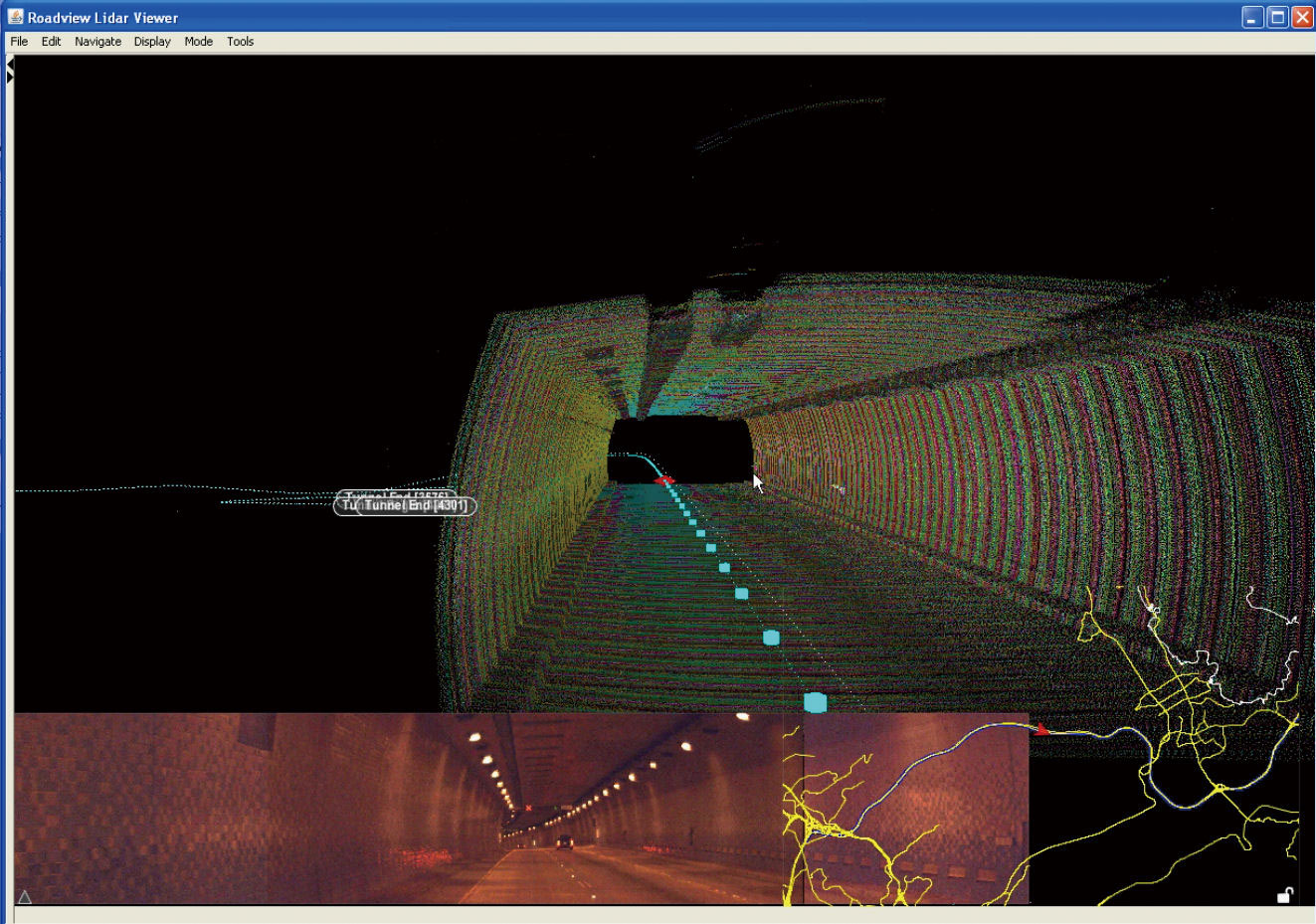
| H-3隧道的坑口(左)与隧道内测量的点云数据(右) |
夏威夷州运输局全体的统和信息系统开发的目标是,可以给夏威夷设置整体的管理提供帮助的目标。具体目标首先是管理整个循环
过程,保证信息的不泄露不丢失。并且整个运输局内都可登录,保证信息完全共有,以及与GIS(地理信息系统)的统合。
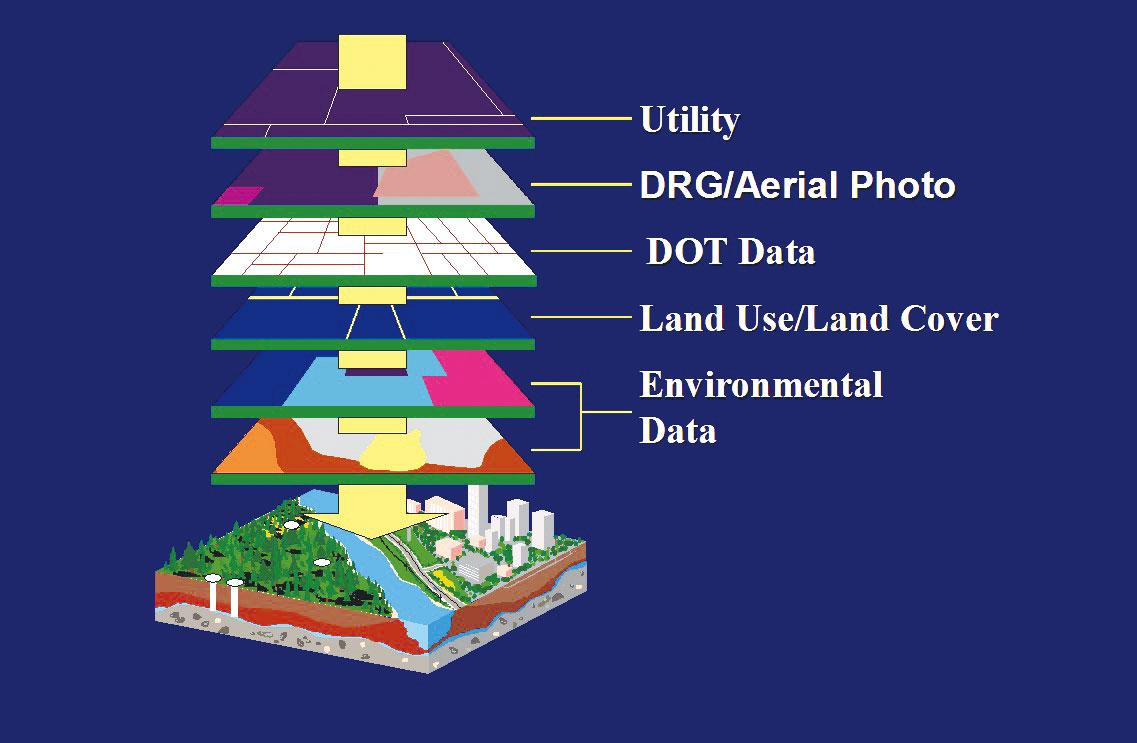
GIS的特征是可把各种类型的信息综合成同一信息。比如把航拍图和生命线的信息,道路设施的信息,土地利用和地表数据,环境数据等统和起来。
为了把各种信息统和起来,该局还导入了可表现在道路上的位置和距离程的「直线参照系统(Linear Referencing System)」。
现在,该局現在使用的工具包括可搭载读取点云用应用程序Pointools的三维CAD,Microstation和
GIS系统的GeoMedia 3D。并且还收集点云信息,以作为活用工具使用。
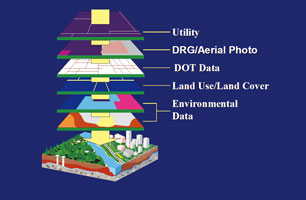 |
| 把各种信息统和起来观察的GIS概念图 |
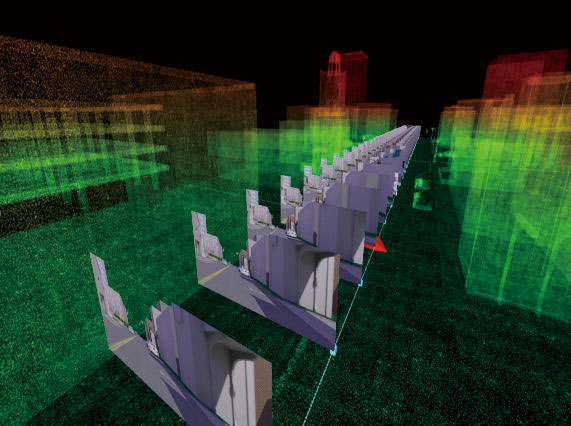
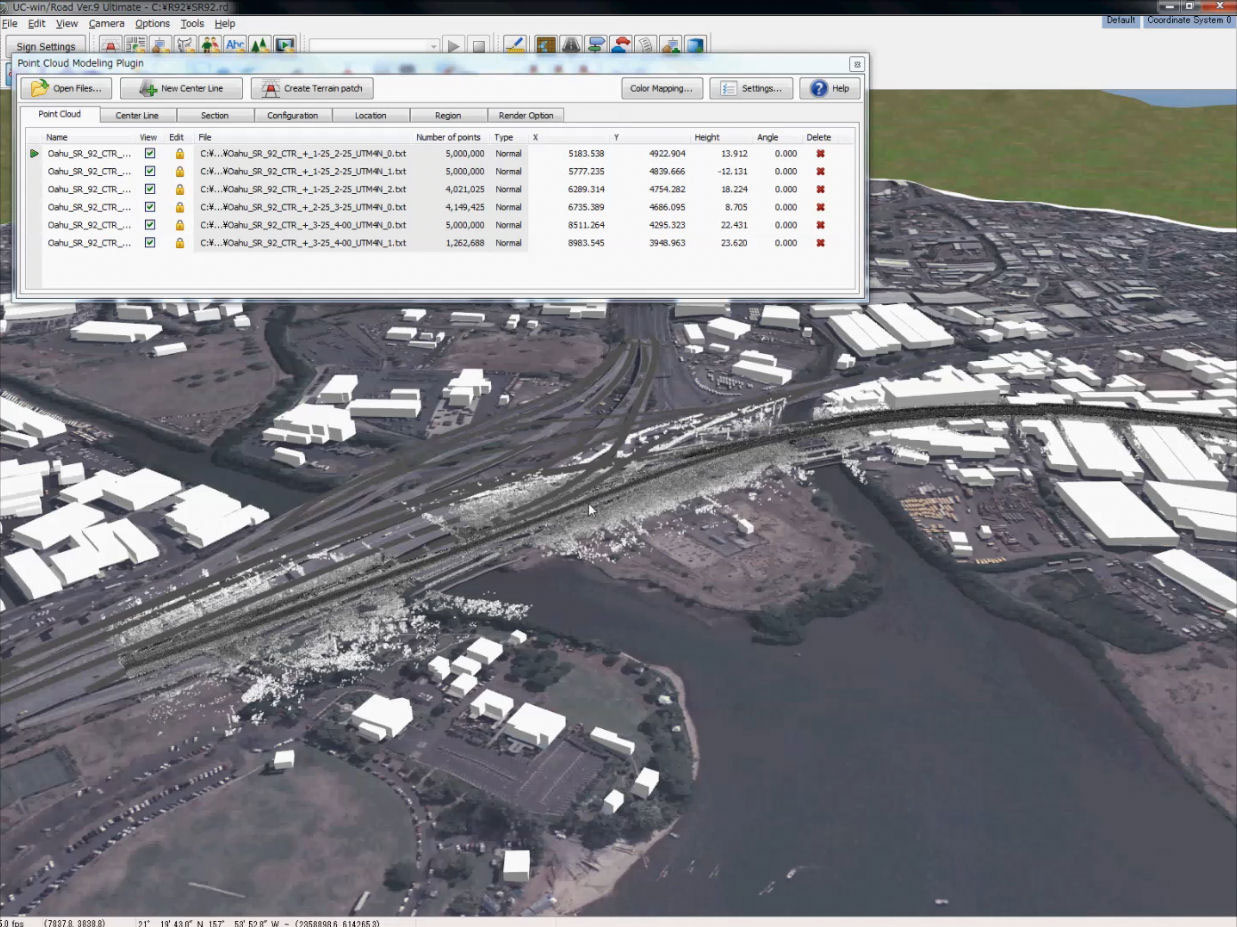
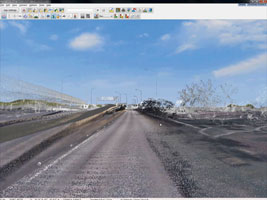
夏威夷州运输局高速路调查工程师把到目前为止测量到的点云数据和照片进行合成,并把点云数据着色。
UC-win/Road当中使用点云插件和照片处理扩展插件读取点云数据和照片数据,把各自的测量及摄影位置相吻合并在点云数据中着色。
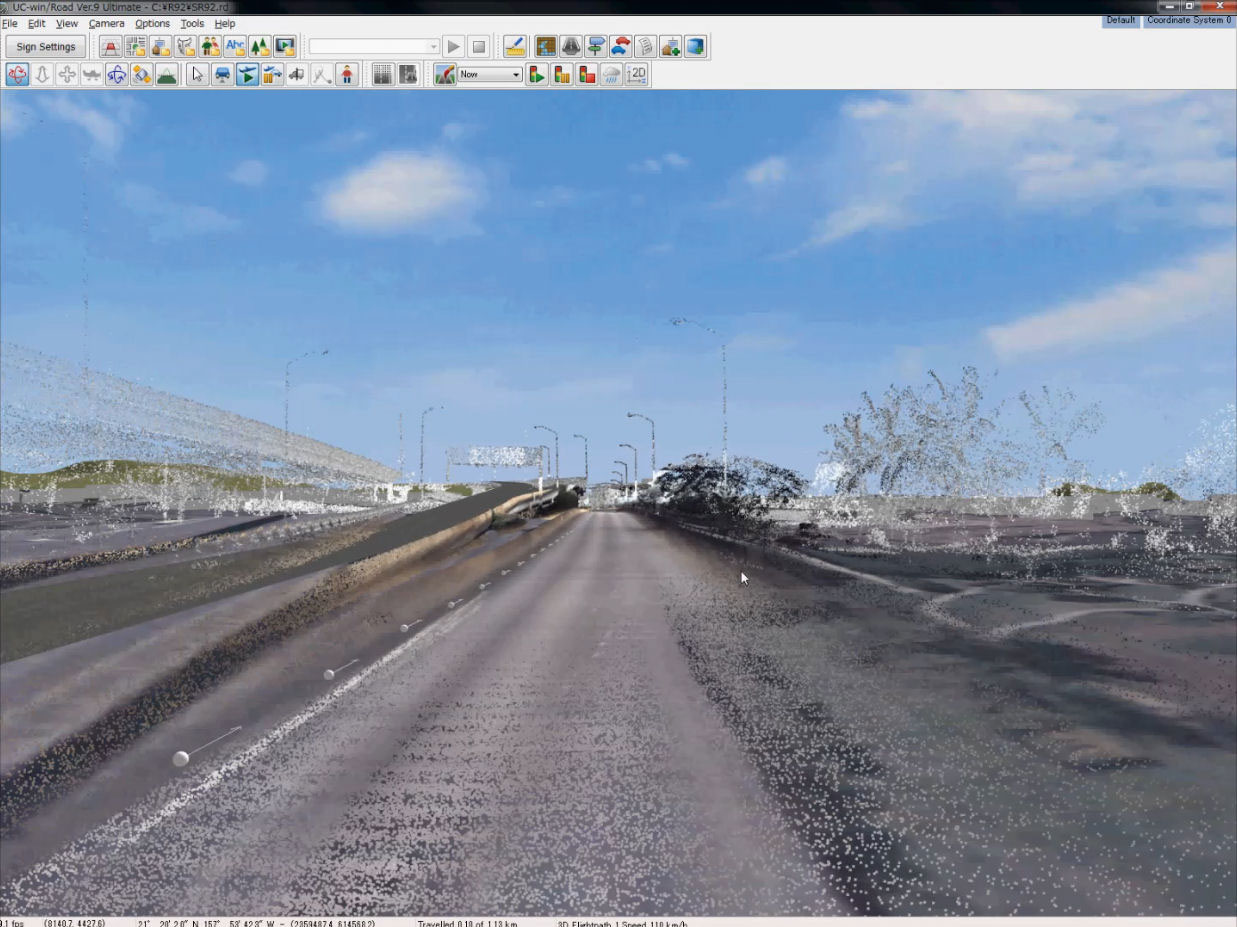
其结果是,白色的点云在着色之后更加易懂,给高速公路路的管理提供很大帮助。
夏威夷州运输局今后也会在FORUM8的帮助之下,提高高速公路和构造物的维持管理技术。
 |
|
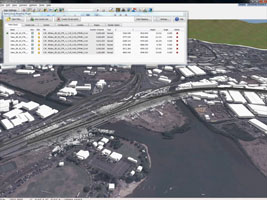 |
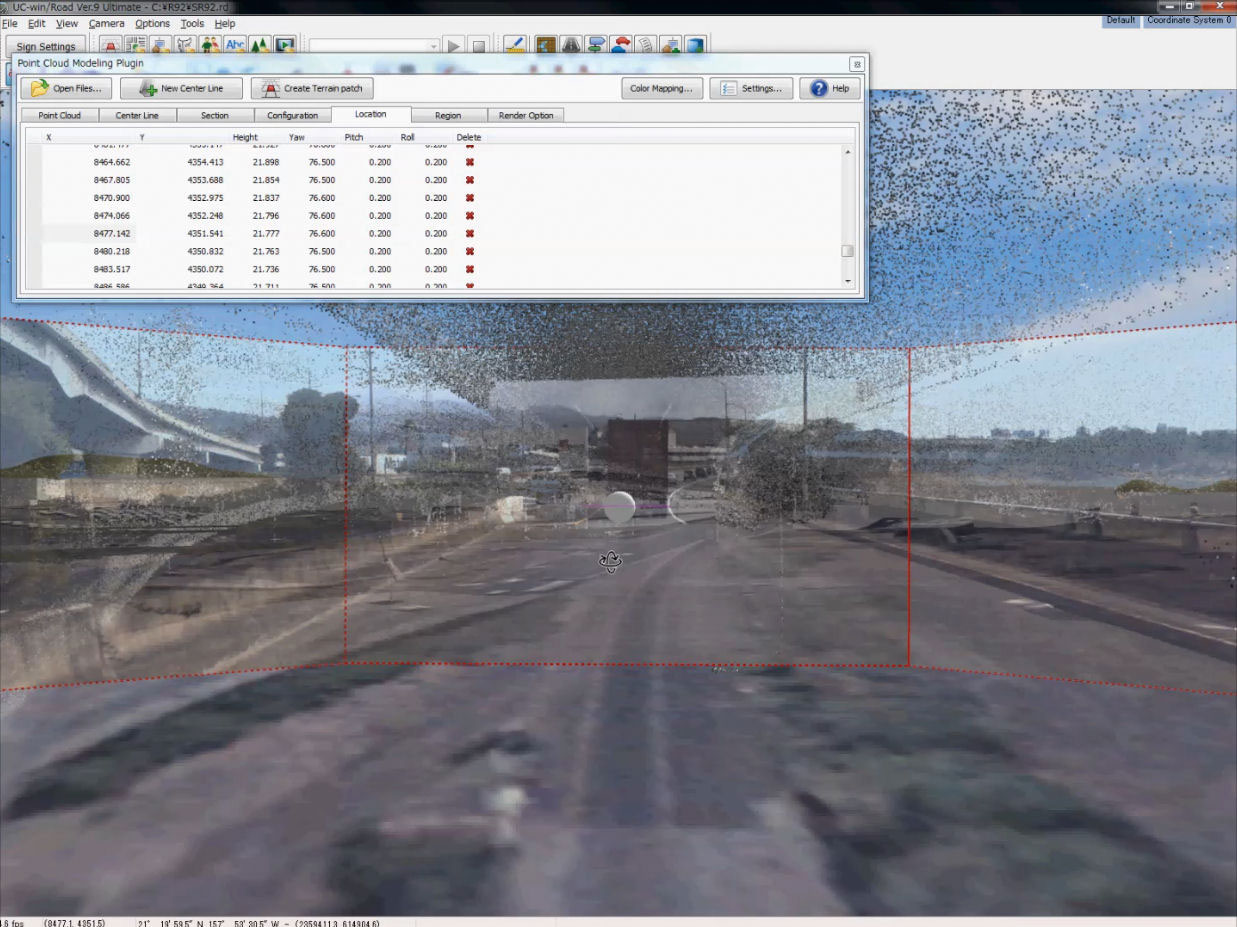
| 点云数据和照片的计测摄影位置统和示意图 |
|
在UC-win/Road中读取点云数据和照片数据 |
| |
|
|
 |
|
 |
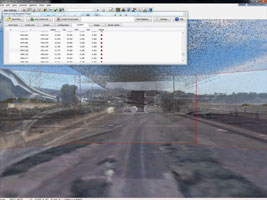
照片数据和点云数据的计测位置统和
|
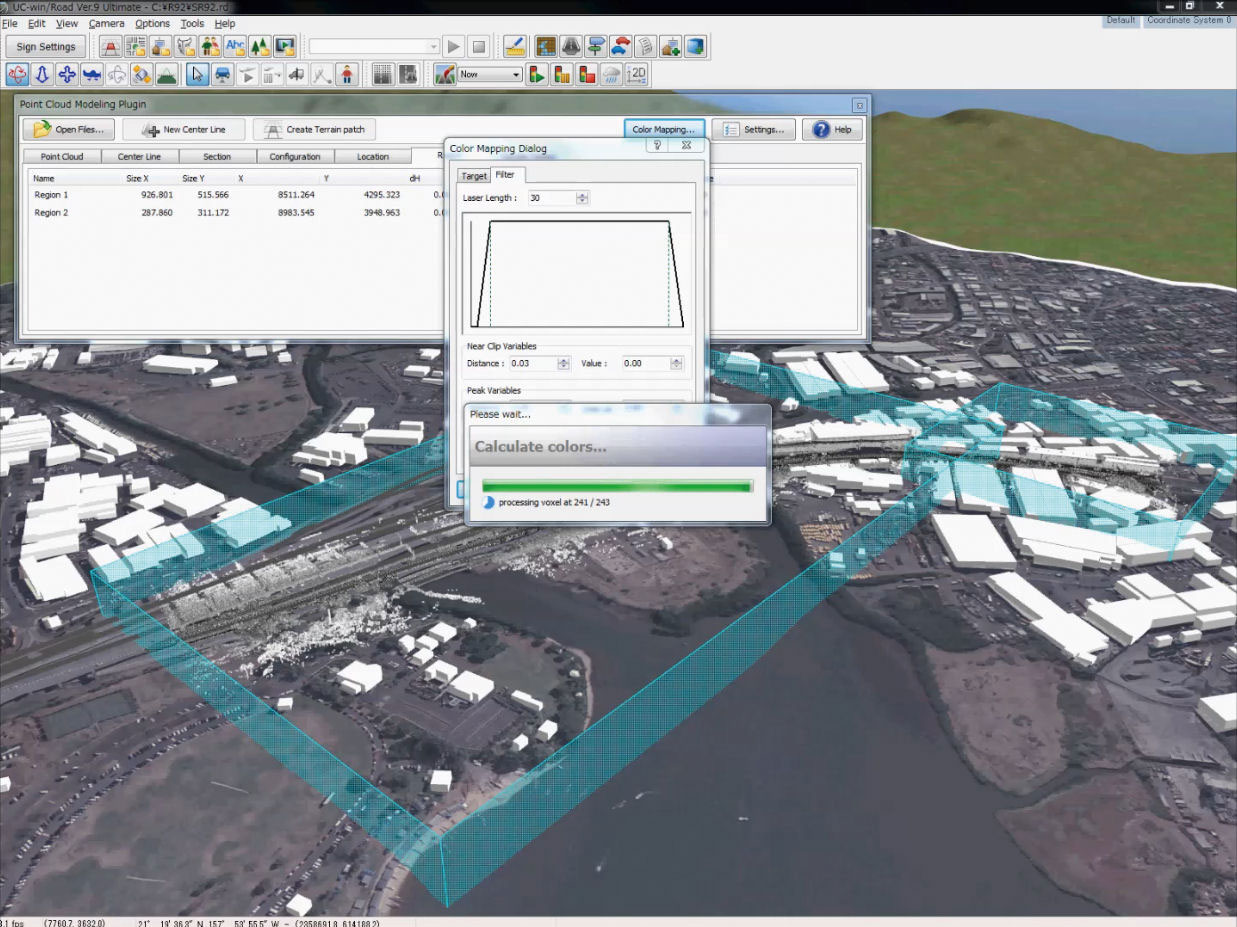
|
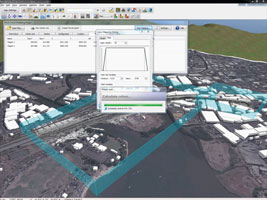
在点云数据中进行着色的演算作业 |
| |
|
|
 |
|
 |
| 有色点云数据当中进行驾驶模拟 |
|
点云数据和照片在UC-win/Road当中进行统和
夏威夷州高速公路调查工程师(右侧) |
|