程序功能与特征
 |
|
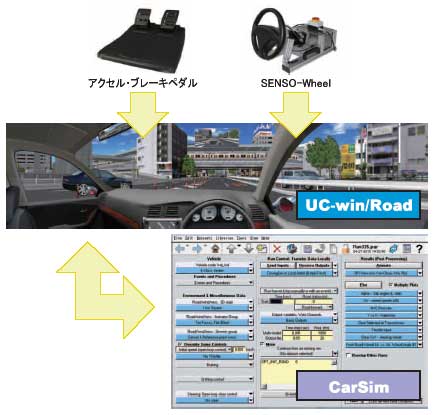
组合SENSO-Wheel(转向装置控制器)・CarSim在UC-win/Road上体验接近于实车的转向装置操作。
| ◆◆◆ 相 关 信 息 ◆◆◆ |

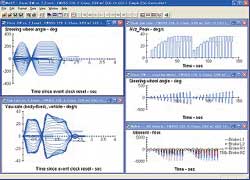
◆UC-win/Road CarSim连接 驾驶模拟器 视频 ('10.06.11刊载)
|
・UC-win/Road CarSim连接DS 箱根turnpike |
 |
 |
|
FORUM8公司组合UC-win/Road、SENSO-Wheel以及CarSim开发出了接近于实车的模拟功能。
标准搭载了方向盘力反馈功能、各种参数设置功能、校准等功能,实现了在各种气象环境以及路面状况中的接近于实车的驾驶模拟。 |
|
●主要特长/功能
- 力反馈
通过从转向装置控制器获取转向装置位置后将模拟结果发送至转向装置控制器可以接受如实车般的反力。
- 各种参数设置
设置反力以外的信息如摩擦力以及衰减力、发条刚性设置
- 校准功能
可自由设置转向装置中心位置以及最大旋转角度。
●什么是SENSO-Wheel
- 功能
SENSO-Wheel是SENSODRIVE公司制造的搭载力反馈功能的转向装置控制器。
驱动搭载转向装置的电动机实现接近实车的转向装置操作。
●主要用途
- 针对驾驶员的训练
- 探讨道路修复
- 山道等险路/弯曲道路中的驾驶模拟
|
|
CarSim 8.02
CarSim是株式会社Virtual
Mechanics产品,是在乘用车以及小型商用车的多种驾驶条件和环境条件中分析和评价动态举动的车辆运动模拟器。
■CarSim的特长
- 实现Windows系统上的高速、稳定的模拟(停止、跳跃、颠倒也可)
- 丰富的GUI(浏览器输入界面、表、动画)以及样本、简单易用
- 可设置3D道路生成功能、各种路面条件、驾驶条件设置
- 标准搭载了MATLAB/Simulink与I/F、简单实现用户控制模型间的结合
- 可实现各种虚拟现实系统上的Hardware In the Loop模拟(RT版)
- 可作为各种驾驶模拟器高精度车辆驾驶模型利用
- 脚本语言实现车辆模型以及驾驶环境条件扩充
■CarSim标准事例
CarSim中标准搭载了200种测试行驶脚本示例、100以上的车辆特性模型事例。
 |
|
 |
| ▲双车道换道测试 |
|
▲车辙路面路面上的牵引车辆行驶测试 |
 |
|
 |
| ▲寒冷地测试ABS控制的有无 |
|
▲FMVSS 126 ESC自动测试 |
 |
| ▲通过激光感应器的障碍物识别 |
|
|
|
株式会社Virtual Mechanics http://carsim.jp/ |