|
フォーラムエイトは、マサチューセッツ工科大学(MIT)の産学連携プログラムにより、2021年から毎年3月と9月に「MITスペシャルセミナー」を開催しています。8回目となる今回は、航空宇宙工学科のJonathan P. How 氏をお招きし、『不確かな世界における自律性のイノベーションAutonomous Innovations in an Uncertain World』をテーマにご講演いただきました。
はじめに―UAVを用いたインフラ自動点検
本講演では、無人航空機(UAV)を活用したインフラ自動点検技術の実現に向けた課題と解決策についてお話しいただきました。
How氏はまず、自動点検のメリットとして次の点を挙げました。
・迅速かつ広範囲にインフラの安全性をチェックできる
・人間ではアクセスが難しい場所の点検が容易になる
・リアルタイムでデータを取得できる
・従来の方法よりも経済的である
しかしその実現には、次の課題を解決する必要があるといいます。
・位置の特定: UAVの位置情報を取得し(GPSは使えない場合が多い)、構造物との相対的な位置を把握する
・通信について: 建物の近くでは電波が常に安定して届くとは限らず、安全性に懸念が生じる可能性がある
・不確実性への対処: 構造物の近くを飛行する際には、風など予期せぬ事態の影響を受ける可能性があり、安全上の懸念がある
・センシング技術の選択: コスト、重量、飛行時間を考慮し、カメラやLiDARなどの搭載機器を選択する必要がある
インフラ点検の未来を開く MITの最新技術
これらの課題を解決するため、How氏の研究チームが開発したのが以下の技術です。
1.PANTHER / Deep-PANTHER: 障害物をリアルタイムで回避。ディープラーニングで速度と反応性を向上
2.MADER / Robust MADER: マルチエージェントを実現。Robust MADERでは通信遅延にも対応
3.PUMA: 不確実性を考慮した軌道プランニングを達成
4.DYNUS: 動的な障害物処理と静的マッピングを高速で実現
次世代のUAV技術で実現する 新たな可能性
位置特定の第一歩として、シングルエージェントのUAVシステム「PANTHER」が開発されました。このシステムは飛行中に「どこを見るべきか」を適切に計画するもので、それによって障害物の位置を迅速に特定し、回避します。その後、「Deep-PANTHER」ではディープラーニングを使用し、速度を大幅に向上させました。
次に、マルチエージェントシステムへのスケールアップとして、「MADER」が開発されました。MADERは分散型で非同期のシステムであるため、スケーラブルで衝突のない軌道生成を実現しています。「Robust MADER」ではさらに、エージェント間の通信を堅牢なものにしました。
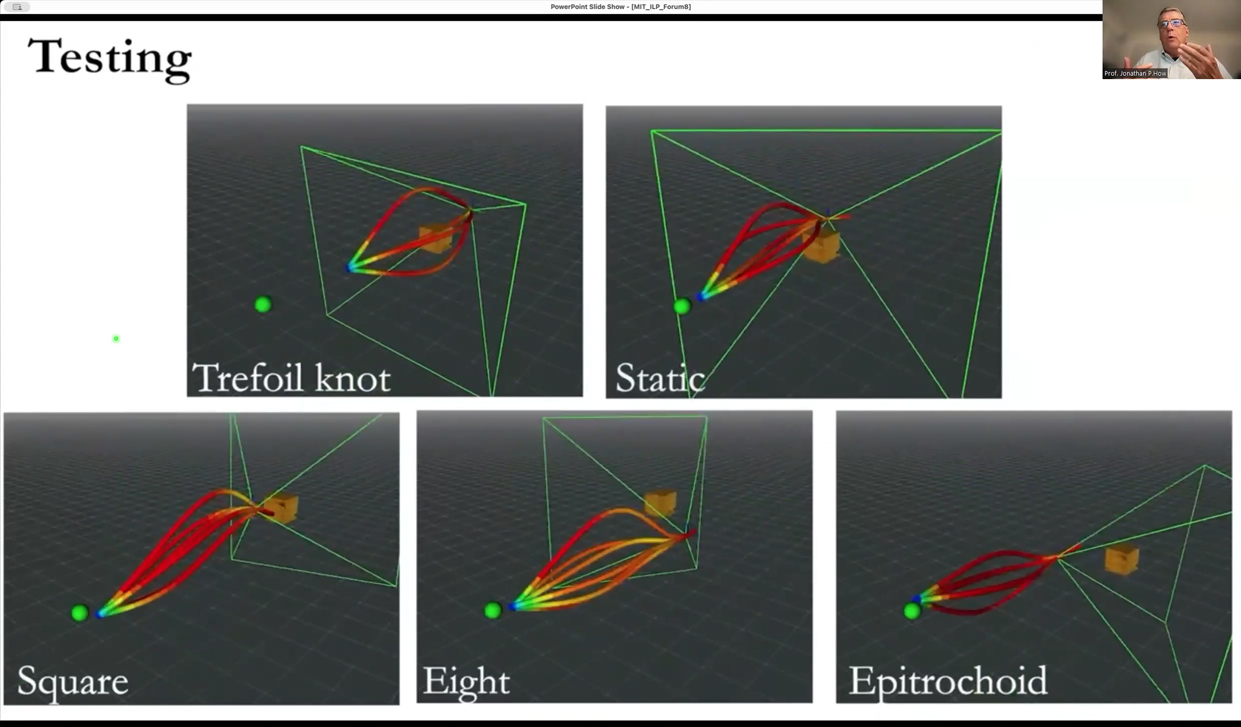
「PUMA」は、不確実性への対処を考慮して開発されました。このシステムは、フレームアラインメントによる軌道補正と不確実性の伝播による軌道計画の2つの方法を使って、予期しない事態への対処を可能にしました。
最後に、現在開発中の技術として「DYNUS」が紹介されました。このシステムはLiDARと慣性オドメトリーを使用しており、動的な障害物処理と静的なマッピング情報処理の両方を実現しています。近年、手のひらサイズの小型のLiDARセンサーが登場したことで、さらなる発展が期待されるところです。
おわりに
これらのシステムは、従来の「計画、推定、ナビゲーション」に基づくUAVプログラムを踏襲したものですが、AIと機械学習の能力を活用することで高度な知覚タスクが実行できているのが特徴的であるとHow氏は述べます。これにより、従来の方法では解決できなかった複雑な問題をオンボードで迅速かつ高性能に解決できるようになると期待を込め、講演を締めくくりました。
|
|