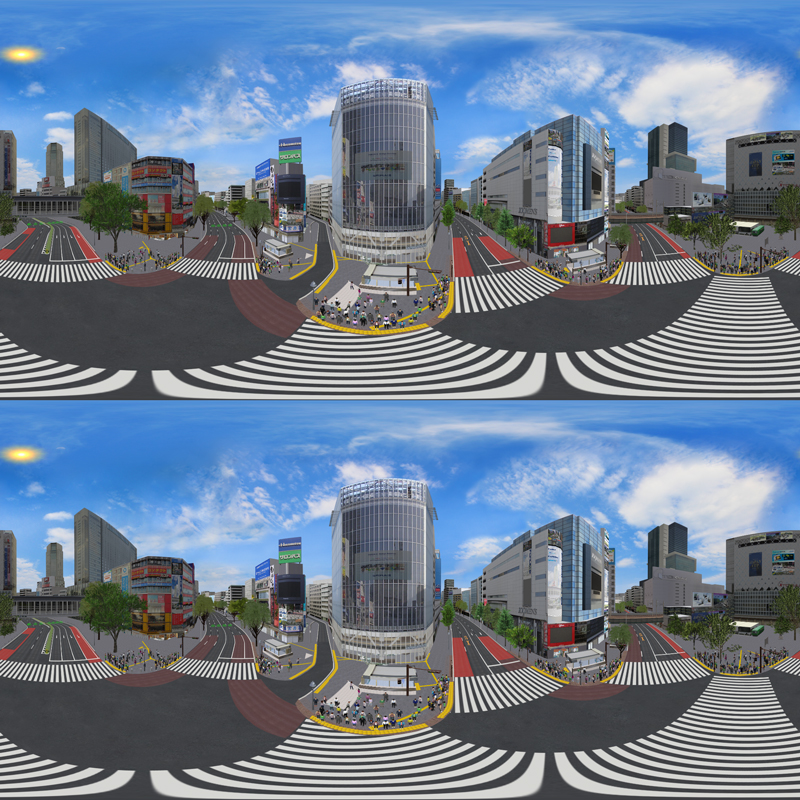
| 렌더링 기능 강화 360도 동영상 렌더링 기능 ・ 렌더러 선택으로 360도 이미지 변환이 가능합니다. ・ 360도 동영상의 일반적인 형식으로 Equirectangular 투영 렌더링을 지원합니다. ・ 상단, 하단 형식으로 스테레오 렌더링도 가능합니다. ・ 정지 이미지로 저장하거나 동영상을 녹화한 후 360도 원하는 방향으로도 시점을 변경할 수 있습니다. 또한 설명용 이미지나 동영상을 만들 때 스테레오 입체 영상에 대응할 수 있는 간이 VR 체험 동영상 제작이 가능합니다.
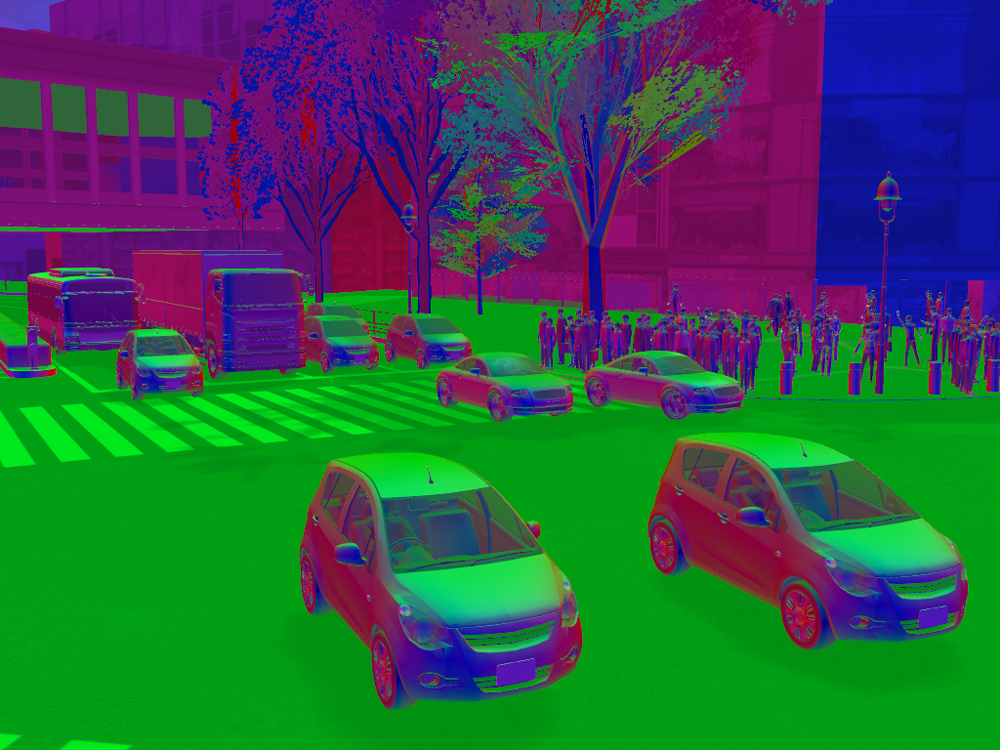
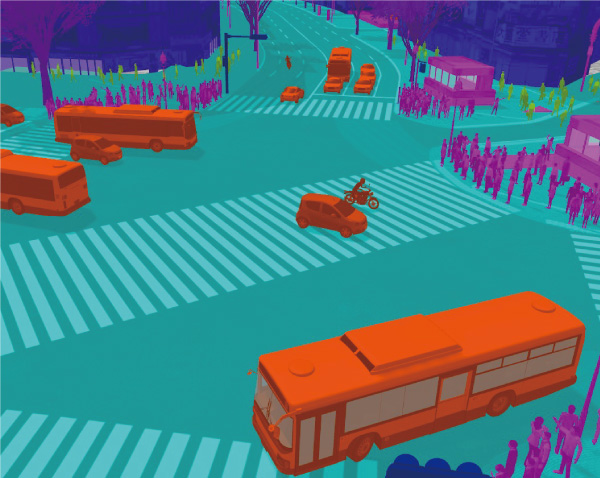
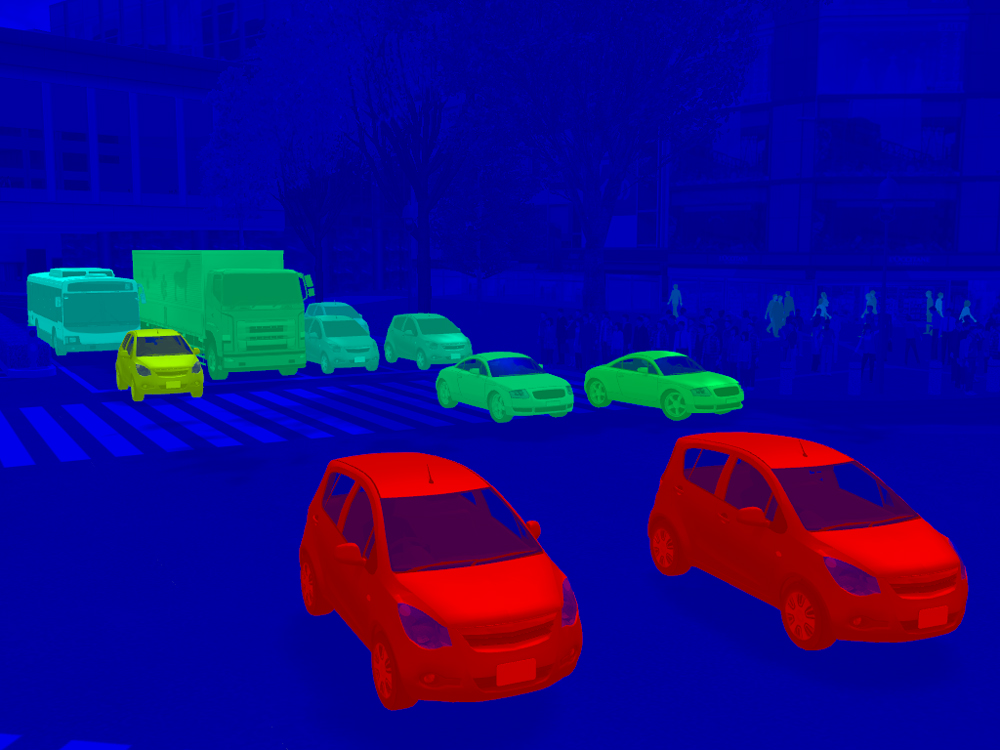
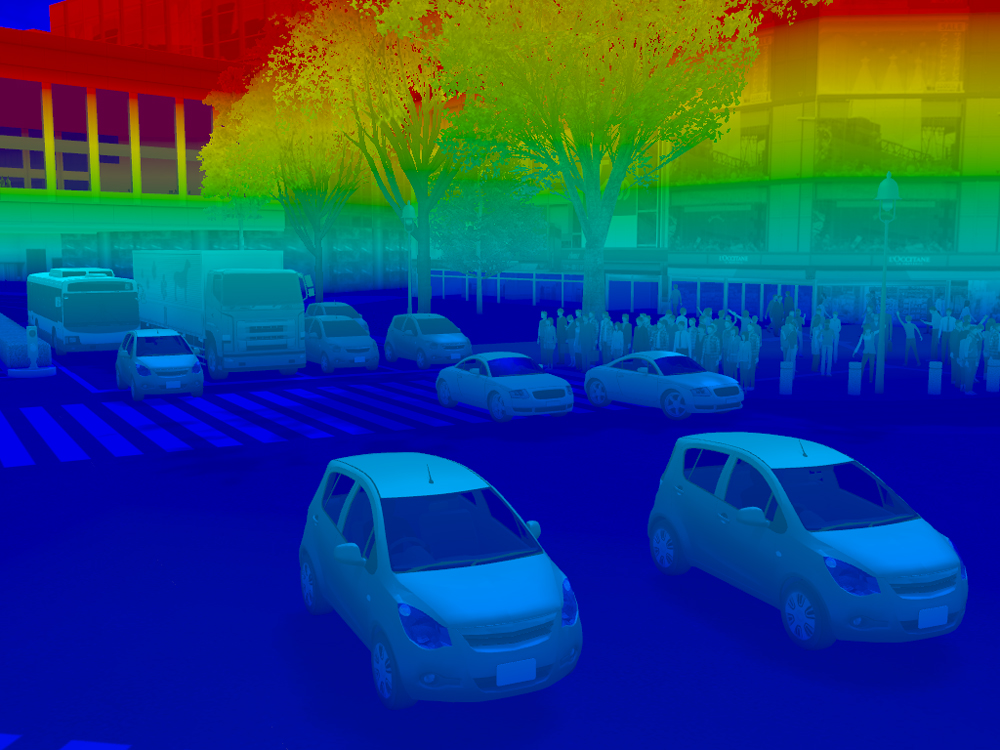
렌더링 처리에 대한 커스터마이즈 기능 ・렌더링 처리를 커스터마이즈 할 수 있도록 시각화 수정이 가능합니다. ・쉐이더 커스터마이즈의 예로는 "커스텀 쉐이더 샘플 렌더러" 를 추가할 수 있습니다. ・오브젝트 종류별 및 표현 선 정보 깊이 맵 오브젝트의 속도 정보, 가속도 정보 등을 바탕으로 한 착색이 가능합니다. ・다양한 정보 시각화 표시 방법의 전환과 깊은 학습을 위한 세분화 교사 데이터의 생성 등이 가능합니다. ・UC-win/Road SDK를 이용하여 렌더링의 커스터마이즈가 가능. 용도에 따라 개체에 저장된 정보를 시각화 플러그인 개발도 가능합니다.
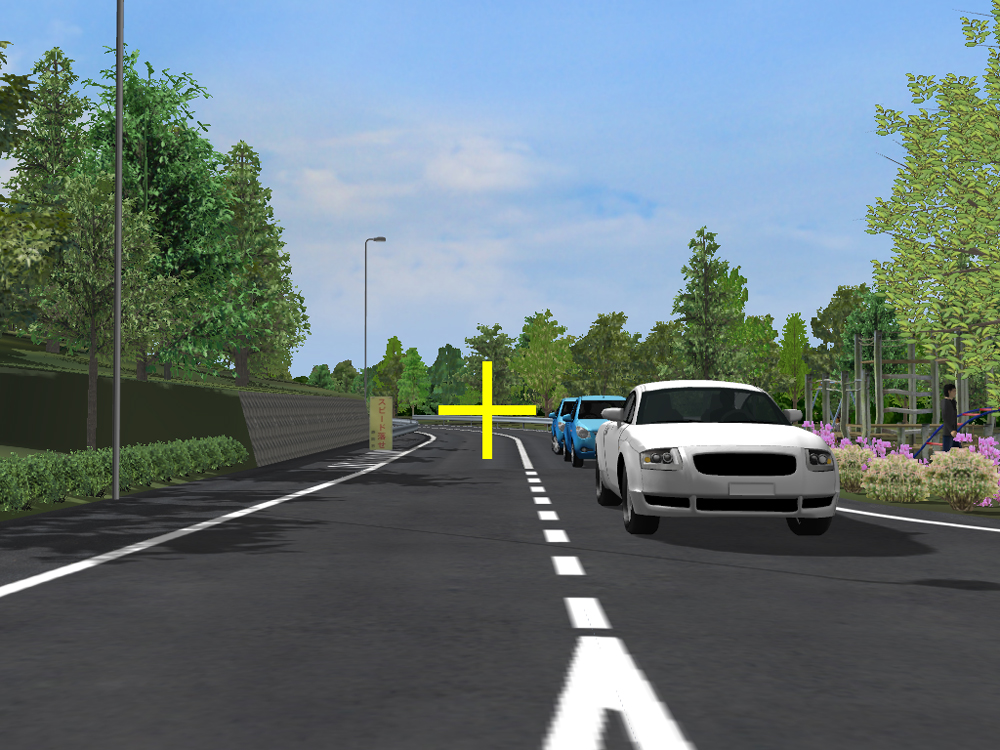
시뮬레이션 연계 강화 시선 계측 플러그인 옵션 시선 계측기와 UC-win / Road를 연계하기 위한 옵션 · 계측 기기의 UDP 통신에 의한 입력 인터페이스를 정의, 측정 기기에서 플러그인에 UDP 통신부를 개발하여 모든 시선 계측 장비와 연계하는 것이 가능합니다. · 계측 기기에서 체험자의 시선 방향을 계산하여, 시선 위치를 실시간으로 UC-win/Road의 화면 상에 표출됩니다. 오브젝트 센서 시뮬레이션과 연계. 계측 대상자가 시인하고 있는 UC-win/Road 상에서의 객체가 검출 가능합니다.
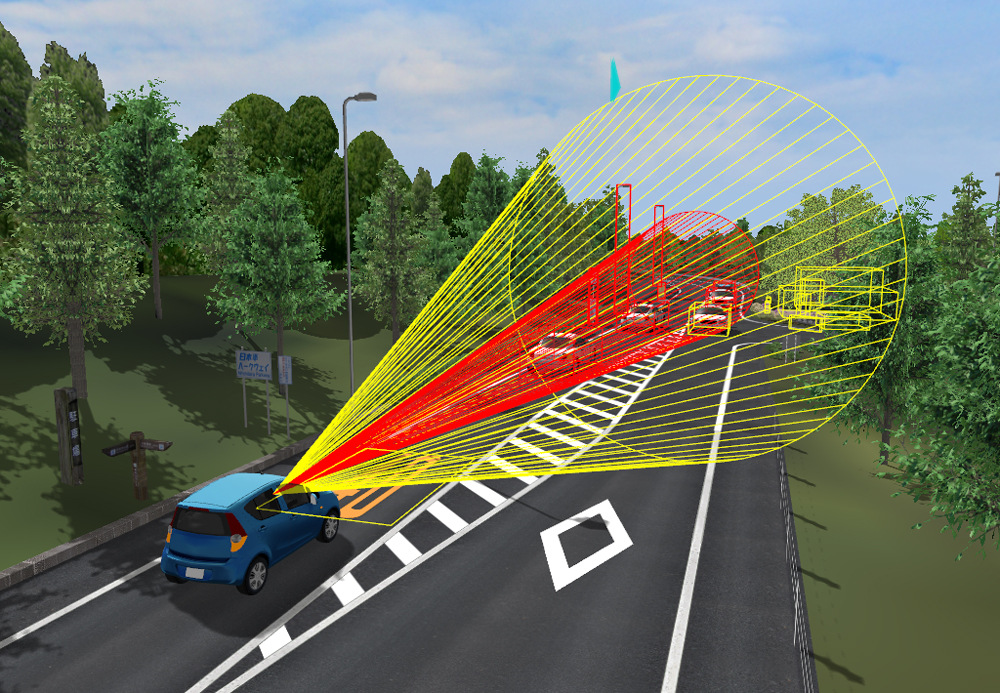
개체 검색 플러그인 옵션 UC-win/Road 상에서 발견된 개체 정보를 검색 · 활용 가능 · 꼭지각과 거리로 정의 감지 범위와 교차하고 있는 객체가 발견되었습니다. · 정지형 운전 차량의 자동차 센서로 사용할 수 있습니다. 시선 계측 장치와 연계하여 시선 방향에 포함된 객체의 검출에도 대응합니다. · 검출 결과는 시뮬레이션 실시간 연동 기능으로 활용이 가능하다. 시뮬레이션 실시간 연계 기능에서 개체 검색 결과를 포함한 시뮬레이션 정보를 실시간으로 연계가 가능합니다. 또한 대상 응용 프로그램 TCP / IP 전송 연계할 응용 프로그램이 그 정보를 바탕으로 차량 제어 명령을 전송함으로써, UC-win/Road와 외부 애플리케이션을 조합 한 차재 기기의 시뮬레이션이 가능합니다.
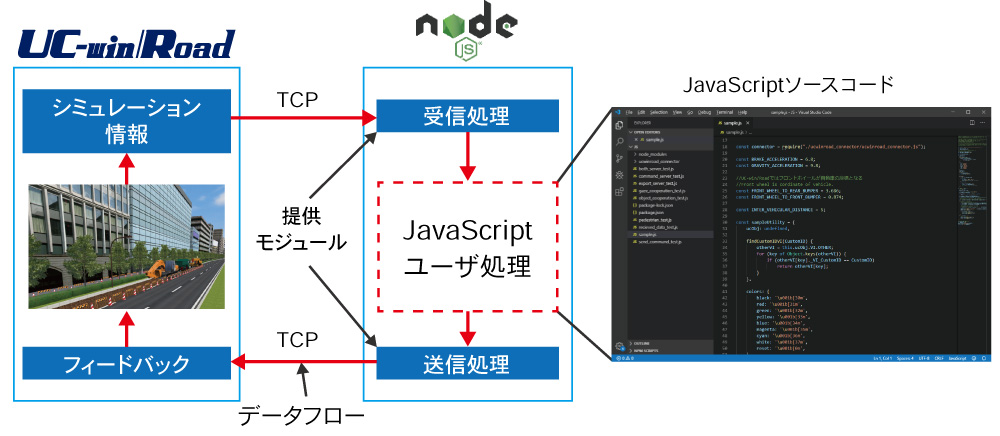
시뮬레이션 실시간 연계 Node.js 제휴 · 시뮬레이션 실시간 연계 플러그인과 Node.js를 함께 사용하기 위한 TCP 통신을 정의하는 모듈입니다. · JavaScript 의한 실시간 시뮬레이션 연계 처리의 구현이 가능합니다. · UC-win/Road에 보낼 수 있는 명령으로 주행 차량 운전을 제어할 수 있도록 덮어쓰기 명령과 사용자 변수의 조작 명령이 가능합니다. 조작 대상의 사용자 변수를 시나리오의 변환 조건에 사용하여 시나리오의 전환 제어를 외부 프로그램에서 TCP 통신, JavaScript 프로그래밍하여 수행할 수 있습니다. 운전 차량의 속도와 전방 차량과의 거리가 전방에 너무 가까이 있을 때 비상 브레이크를 작동시키는 JavaScript 구현할 수 있는 예시가 포함되어 있습니다.
VISSIM 연계 플러그인 옵션 UC-win / Road와 VISSIM을 실시간으로 연계하는 플러그인이 추가되었습니다. UC-win / Road 상에서 운전하는 차량 정보를 실시간으로 VISSIM로 보내고, VISSIM에서 운전 차량과 주변 차량을 함께 교통 시뮬레이션을 실시합니다. VISSIM에서의 교통 시뮬레이션 결과 (주변 차량과 신호등의 계산 결과)는 UC-win / Road로 신호를 보낼 때 시각화됩니다. 교통 분석의 시각화 뿐만 아니라 드라이빙 시뮬레이션, 자동 운전 및 ADAS 이동성에 관한 연구 개발에 사용할 수 있는 기능입니다.
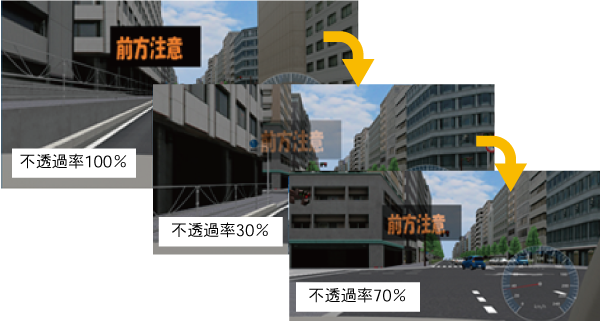
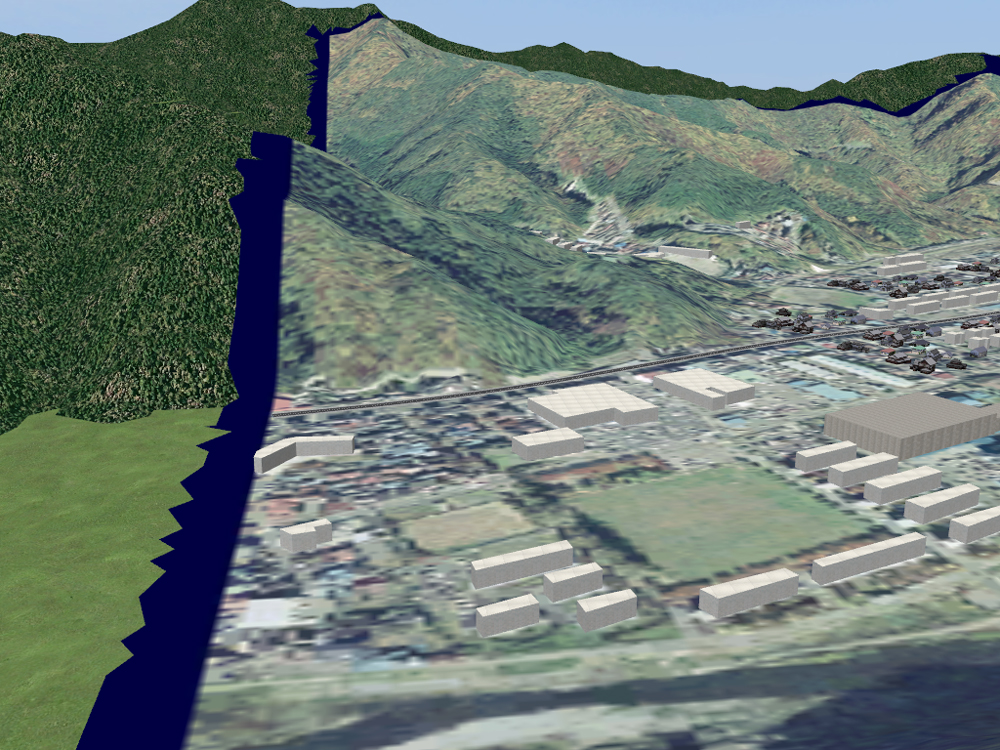
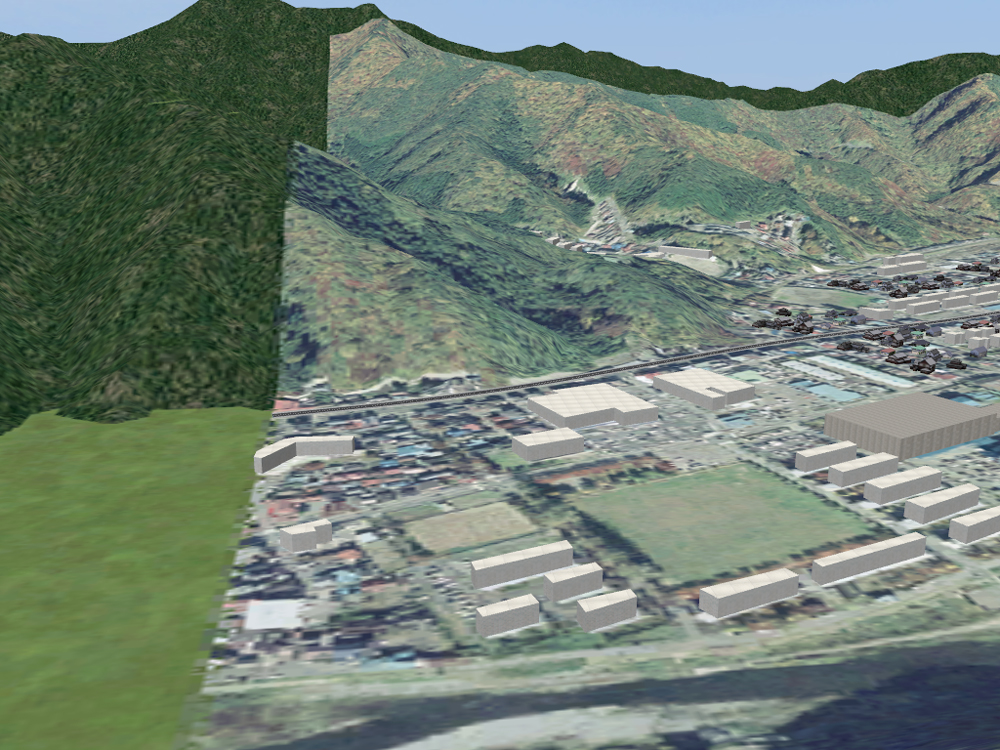
데이터 생성 기능 강화 LandXML 데이터 연계 강화 OCF 검정 "LandXML에 따른 3 차원 설계 데이터 교환"에 대응합니다. 지리원 지도 읽기 지리원 타일 이미지를 로드 할 때, 프로젝트 좌표계에 다시 투영하고 왜곡된 보정에 대응합니다. 이미지 위치의 정확도가 향상되었습니다. 지리원 타일 이미지의 통합 처리와 줌 레벨 제어 설정을 추가합니다. 스크립트 스크립트 파일 입력과 출력 기능을 추가하였습니다. 프로젝트 간의 복잡한 스크립트 복사 나 여러 사람이 데이터 작성을 할 때 용이합니다. 시나리오 시나리오 설정 "멀티미디어"의 이미지를 가상 디스플레이 및 운전 차량의 성능 프로파일에 설정된 HUD 표시에 대해 "불 투과율 설정"에 따라 투명도를 변경할 수 있도록 수정하였습니다.
알파 블렌딩을 지원하며 알파 채널을 사용하여 거리지도의 중첩에 대응합니다. 또한 스트리트 맵 경계의 표시, 지형 패치 부분의 적용 방법을 개선하고 더 자연스럽게 스트리트 맵을 붙여 넣을 수 있게 되었습니다.
장치 연계 기능 강화 UAV 플러그인 옵션 Ver.5 최신 DJI SDK 업데이트하고 사용할 수 있도록 DJI 사의 UAV가 증가했습니다. 또한 Android 어플리케이션의 업데이트를 실시하였고, UI 표시의 향상과 UAV의 미디어 파일 검색, 클라우드에 데이터 백업을 추가했습니다. Cycle Street 연계 플러그인 옵션 64bit 대응 자전거 시뮬레이터가 64bit 버전의 UC-win / Road에 대응합니다. |
||||||||||||||||||||||||||||||||||||||||||