バーチャルリアリティUC-win/Roadをベースとした
高性能大型ドライビングシミュレータ
8DOF交通安全シミュレータ
プログラム概要
本ドライビングシミュレータシステムは、中国交通部が交通安全研究のために計画したシステムで、交通運輸部公路科学研究院が仕様を作成、構築した大型シミュレータです。2009年1月国際入札で(株)フォーラムエイトが単独受注し、2014年2月に最終の受け渡し検収により完成しました。バーチャルリアリティUC-win/Roadをベースとした高性能大型ドライビングシミュレータのシステムと機能の概要を解説いたします。

プログラムの機能と特長
システム全体イメージ
-
8DOF交通安全シミュレータは、6自由度モーションプラットフォームとYawテーブル、Xテーブルで構成される8自由度車両運動モデル実車運転模擬装置です。
バーチャルリアリティUC-win/Roadのクラスタ構成による360度投影装置、音響システム、振動装置などにより限りなく実運転に近い環境を提供します。乗用車キャビンと、トラックキャビンは、短時間で交換できるドームシステムを備え、CCDカメラ、映像モニタと録画システムなど高度な管理システムも実現しています。
交通流シミュレータ、車両運動モデル、視線追跡などの計測装置も最高水準のシステムとUC-win/Roadが連携し、高度な安全運転研究に貢献します。
▲システム全体イメージ
システム構成
-
- 多様な運転環境下での運転者心理、心理特性の計測、分析と研究機能(車道変更、加減速、方向変換等)
- 年齢別運転者(未成年/青年/老人等)運転行為研究機能
- 注意力分散(携帯、ラジオ等)交通安全への影響研究機能
- 疲労が交通安全に及ぼす影響に対する研究機能
- 飲酒、疾病、薬物が交通安全に及ぼす影響及び欠陥運転行為研究機能など道路交通安全研究機能
- 設計段階での道路安全性評価機能
- 運営及びメンテナンス段階での道路安全性評価機能
- 特殊区間(長区間下り、トンネル、急カーブ、交差点など)安全保障技術研究機能
- 道路照明、誘導と可視化変化など条件下の運転安全研究機能
- 道路景観及び交通施設設置のVR最適化設計機能
- ネット条件下道路安全保障技術研究機能等
- 悪天候(霧、氷と雪、高低温、吹雪、風等)条件下の交通安全研究機能
- 極端な交通条件(交通事故、異常交通事件等)下の交通安全及び応急保障対策研究機能
- 新型ITS車載装備検証機能
- 交通事故再現及び司法検定機能
■期待される効果と機能
1.運転行為研究機能
道路交通システムの「人」という要素をめぐって本シミュレータは運転者の運転感覚を忠実に再現でき運転者の運転行為の研究機能を有すること。
2.道路交通安全研究機能
道路交通システムの「道路」という要素に対して本シミュレータは道路交通安全研究機能を有すること。
3.特殊環境下の交通安全研究機能
道路交通システムの「環境」という要素に対して、本シミュレータは環境要素が交通安全にもたらす影響原理と作用構造を研究できること。環境、とりわけ特殊環境下の交通安全研究機能を有すること。
4.その他
運転者の運転感覚を忠実に再現でき、運転行為の研究に活用可能。

SYSTEM
-
- 走行中路面の凹凸感(Direct Setpoint)を再現
- 走行中異なる道路の振動(Frequency Spectrum)を再現

▲システムブロック図
■ドーム DOME
ドームとスクリーンは8 枚フランジタイプのFRP パネルによって構成されています。FRP は硬くて軽い材質であり、車両キャビンをカバーする同時にプロジェクションシステムのスクリーンとしても役割を果たしています。


▲ドーム上部(写真上)、ドーム入り口(写真下)
■マルチプロジェクターシステムMulti Projector System (8 units)
Barco SIM5R Projector
マルチプロジェクターシステムは8 台高性能シミュレータ専用のプロジェクターによって構成されています。エッジブレンディングを用いて360 度で車両走行のシミュレーション環境を提供。プロジェクターの向きや投射角度は、専門のコンサルタントよりシミュレーション検証を行った上で設計され、ドライバーの目線には支障にならない構造となっています。




▲Barco SIM5R Projector
■実車キャビン Real Car Cabin (Honda Accord)
Honda Accord の実車1台を利用。実車のエンジン部分は取り外され、かわりに電子制御システムや音響PC などを装備し、内部にパソコン用電源とインターネット接続用の接続端末が用意されています。リアルな運転感覚を維持するためハンドル、アクセル・ブレーキも実車部品のまま使用。



■トラックキャビン Truck Cabin
Order Made Truck Cabin
ステアリング、アクセル& ブレーキペタル、座席、シートベルトはHyundai実車トラックパーツを利用。




■ヨーテーブル Yaw-Table
Bosch Rexroth Yaw-Table for EMotion-4000
6DOF 動揺装置と車両キャビンの間に設置され、交差点、急カーブのところで曲がる時に車両本体が回転し、リアルな車両走行を表現。

■バイブレーションシステム Vibration System
Bosch Rexroth EMotion-4000 Vibration
Yaw-Table と車輪の連結部に設けられ、車両が材質の異なる路面上で走行する時の違いを高周波数の細かい振動を表現。



■6軸動揺措置 6DOF Motion Platform
Bosch Rexroth EMotion-4000-6DOF-700-MK2
車両走行中に基本的な車両運動モデルを表現し、車両ダイナミックスの計算より走行中の車両姿勢を忠実に再現。Pitch、Roll、Yaw、Sway、Surge、Heaveという6 つの方向に組み合わせた動きが可能。





■Xテーブル X-Table
Bosch Rexroth Order Made Long Excursion 1 Axis Motion Table
床の上、6DOF を支える長距離直線運動システム。長距離加速する場合の遠心力をドライバーに伝える。

■クラスタコンピュターシステム Cluster Computer System
クラスタコンピュターシステムは、1 台制御用マスターPC と8 台の表示用PCによって構成されています。各チャンネルは専用の表示PC で描画し、マスターPC で8 台の表示用PC を同期させ、360 度ドーム型のスクリーンに映像出力可能なシステムです。





■視線追跡システム Eye tracking System
face LAB はオーストラリア国立大学(ANU)のスピンオフ会社であるSeeingMachines 社によって開発された製品です。
このシステムは2 台のビデオカメラの情報をもとに自動的にリアルタイムで人の顔を追跡し、その顔の運動を計測します。このソフトは画像から顔の特徴を3次元でとらえて、その顔の特徴を抽出し、それらの特徴を追跡します。
顔の特徴が画面で変化したときダイナミックに新しい特徴を選びだし頭部が早く回転したり、画面の中で顔の画像が部分的に乱れたりしても、それらを追跡し続けます。出力データは眼球運動データ、頭部の位置、回転データ、瞼の開閉度、唇と眉毛の動き、および瞳孔計です。
顔は自然にその人の情報を伝えます。その顔付きを見てその人の意思や注目の度合いを計れます。顔の計測から自然で容易な機械とのインターフェースの新しい流れが生まれます。


■交通流シミュレータ Traffic Simulator
Vissim(ヴィッシム) は、詳細な車両の相互影響を考慮することで、 例えば渋滞や混雑による公共交通の遅延、自転車専用レーン導入時の影響など、よりミクロな視点に立った課題抽出、課題解決をすることができるミクロ交通シミュレーションソフトウェアです。 車両に特化したVissim は、自転車、自動車、バス、タクシー、短距離列車、長距離列車などの複合的な交通シミュレーションができ、混雑による公共交通の遅延予測、自転車専用レーンの導入効果検証などが可能になります。

■車両運動シミュレータ Vehicle Dynamics Simulator
CarSim とTruckSim は、米国Mechanical Simulation 社で開発・商品化された、車両運動シミュレーションソフトウエアです。各種車両(乗用車、トラック、バス、自動二輪車)の様々な運転条件と環境条件での動的挙動を、簡単操作で評価できる、制御設計者や評価技術者向けのツールです。世界中で30社以上の完成車メーカー、60 社以上の部品メーカー、150 を超える大学や研究機関で利用されている、車両運動シミュレーションソフトの業界標準となっています。特に車両運動制御やITSに関連する研究・開発に有効なツールとして好評をいただいております。また、動的挙動の応用として車両横転事故解析や道路設計にも利用する事が可能です。







その他のサブシステム(音響、電源、DVR)
-
音響システム
システム全体のパフォーマンスを確保するため、音響システムは独立したSound PC より構成され、走行中自車の音、周囲シミュレーションの環境音及びキャビンと制御室間のコミュニケーションの音声をサポートします。

電源システム
突然の停電からパソコンシステム、実験データを守るためUPS(無停電電源装置)は電源とパソコンシステムの間に接続されています。UPS は10~20 分安定な電源を供給することができ、この時間を利用し、システムをシャットダウンし、モーションプラットフォームをSettled ポジションに戻す操作ができます。その他、ACC#1 とACC#2 を2 段階に分けて、6DOF 動揺措置と他のモーション(X-table/YAW-table/Vibration)を別々で制御できます。

DVR システム(Digital Video Recorder)
キャビン、DOME 及びシミュレーションルームの中に複数のCCD カメラを設置し、運行中のシステムをモニターリングできます。録画機能も付くので、LOGデータと合わせてドライバーの運転行為の研究に役立ちます。


走行環境作成及びシミュレーション UC-win/Road
-
- 線、円、緩和曲線など道路平面線形のモデル(平面線形)
- 勾配、縦断線形のモデル(縦断線形)
- 路肩、車線、縁石、中央分離帯、緊急停車帯などの横断面モデル(横断線形)
- アスファルト、コンクリート、砂、土などの路面テクスチャをシミュレーション可能
- 橋梁、トンネール、平面交差、立体交差など特殊道路モデル
- 土質、フレーム保護、石質の法面モデル
- 樹木、花、芝生など
- ビル、料金所、ガソリンスタンド、サービスエリアなど
- 平原、山岳、都市、郊外など地域特徴景観
- 空、山、河川などの地理景観
- 交通信号、ガードレール、遮音壁、情報案内板、照明施設などの交通施設
- 自動車、非自動車、歩行者などの交通流モデル、及び動物などのオブジェクト
- エンジン、クラクション、車両タイヤと違うテクスチャ路面、車両と空気(トンネル)、車両と障害物との衝突音をシミュレート
- 道路交通システムの各種交通流バックミュージックをシミュレート
- 雨、風など各種環境バックミュージックを搭載可能
3 次元リアルタイム・バーチャルリアリティ UC-win/Road
3次元リアルタイム・バーチャルリアリティソフトUC-win/Roadは、2002 年ソフトウェア・プロダクト・オブ・ザ・イヤーを受賞。各種プロジェクトの3次元大規模空間を簡単なPC 操作で作成でき、多様なリアルタイム・シミュレーションが行える先進のソフトウェアです。
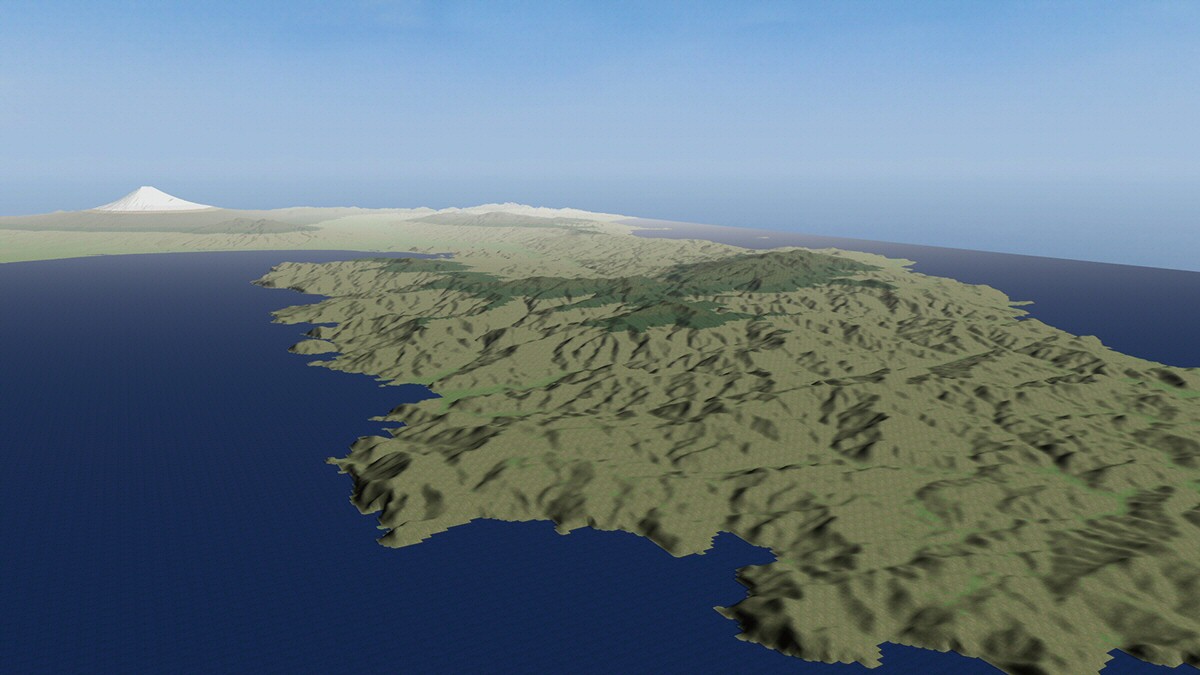
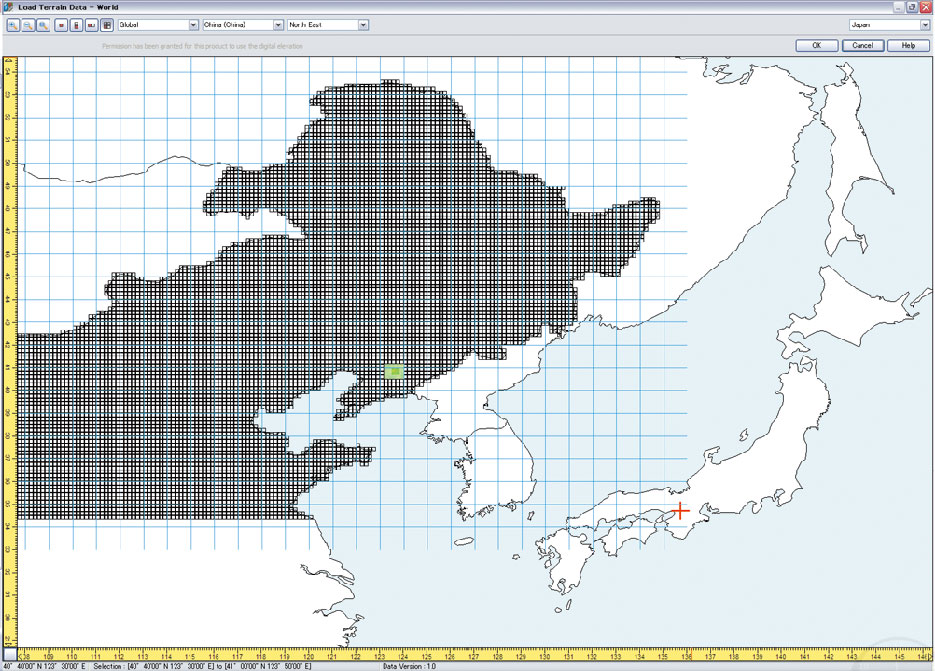
■地形モデリング
仕様:中国地形に対応
対応:SRTM(90mメッシュ)世界測地系変換に対応。衛星写真貼り付け機能、DXF-XML変換、 3D、2D 地形編集機能をサポート。

■道路モデリング
仕様:
対応:
道路・河川・湖沼・飛行パスなど各種線形をパラメータやフリーハンドで入力でき、道路、トンネル、橋梁、河川、歩行ルートを自動生成。道路平面線形(クロソイド・スプライン対応)、縦断線形定義でトンネル、橋梁区間の設定。断面定義では小段を考慮した切り土盛り土処理、テクスチャ処理を実行。複雑な道路構造も線形・断面機能で簡単に作成できます。



■気象特殊効果
仕様:
雨、雪、氷などの路面モデル、雨、雪、氷などの路面特徴をシミュレーション可能
対応:
各種特殊気象を表現のほか、路面設定による路面摩擦力と振動の表現ができる。雨、雪のリアルな表現、範囲を指定できる霧、雷、水撥ね、ワイパー(フロントガラス上面を軸にした動作も可能)の機能などをサポート。

▲路面反射

▲水溜り

▲雨紋

▲雷
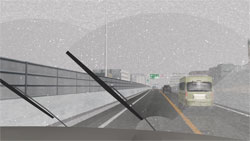
▲ワイパー(雪)
■Road DB
仕様:
GB5768 の基準に応じて、道路標識、警告標識、案内標識及びそのほか標識モデル
(SDK 提供可能、カスタマイズ開発可能)
対応:
中国語版道路交通標識と標線基準「GB5768」を標準対応、データベースよりダウンロード可能
■3D モデリング
仕様:
対応:
標準モデル/ テクスチャと豊富なダウンロードDB の利用により効率的なVR データ作成を支援。3D モデル・テクスチャなどの標準データに加え、インターネットでUC-win/RoadDB から豊富な素材を直接ダウンロードして利用できます。また、便利な編集・移動ツールが用意されており、モデルの拡大・縮小、移動、回転、傾き、配置が可能です。アクション設定による動作モデルの作成、動作制御が行えます。パラメトリック入力での標識、階段、エスカレータ、柵(フェンス)の作成もサポートしています。

■連携機能
仕様:
道路及び施設モデルのインポートについて、他のモデリングソフト(Creator、VEGAなど)の外部導入をサポート
対応:
UC-win/Roadは3DS、FBX、MD3、COLLADA、OBJ形式等の3Dデータのフォーマットのインポートに対応しています。
■データ連携
仕様:
AutoCAD 等の外部データインポートをサポート。
対応:
LandXML による様々なCAD との3D/2D データ交換も可能です。オープンフォーマットLandXML を対応することに よって、Civil3D、InRoads などのCAD 製品と連携し、地形、道路線形と断面情報を共有することが可能です。LandXMLのオープンコンソーシアムLandXML.orgにて、UC-win/Road のLandXML 出力機能が認証されています。
■VISSIM 対応
仕様:
交通シミュレーションソフト(VISSIM)と連携するためのインターフェースを提供可能。
対応:
VISSIM の交通流解析結果を読み込んだ交通解析の可視化に対応。マイクロシミュレーションプレーヤーを用いて、VISSIM のANI.TXTファイルをUC-win/Road に読み込みます。シミュレーション結果を読み込んだ後、シミュレーションを表示する位置を設定し、車両と歩行者をどのモデルで表示するかを設定します。最終的には、動画ファイルのように交通解析結果の再生を操作し、3D空間の中で交通の状況を確認できます。

■運転シミュレーション・シナリオ機能
仕様:
特定交通事故のシミュレーション(衝突、追い越し、接触など)、交通渋滞の表現
対応:
シナリオ機能で決められた様々な動きをモデルに設定が可能。シナリオと は、シミュレーション開始から終了までの一連の流れのことで、条件により発生させる複数のイベントで構成されます。現実に起こりうる事象やテストしたい条件を設定したシナリオのもとにシミュレーションを行うこと で、VR作成の意図をより効果的に達成することができます。シナリオ機能によって、接触判定、衝突時の警告表示、音声再生機能を搭載。
■VISSIM 対応
仕様:
対応:
OpenAL を使用し多様な環境音、他車両音、自車音(エンジン音、タイヤ音、風切り音、トンネル反射音)に対応。ローパスフィルタ対応。スキール音(スリップ音)、4輪別の音再生に対応。アスファルト上の車両が急加速、急ブレーキ、急旋回するとき、スキール音を発生させることが可能。
■運転シミュレーション・シナリオ機能
仕様:
車両タイヤなどの特性を含む正確なダイナミクス・モデルを提供し、特にカーブでの方向転換、加速、減速性能が実際のテストパラメータとうまくマッチすること。
対応:
自動車(4 輪車)の運動モデルを再現するため、UC-win/Road は運転中の車両全体の動き、エンジン、エンジンから車輪までの各伝達装置のモデルを実装し、よりリアルな運動の表現が可能。これにより、以下のような現象が再現されます。
■車両運動モデル
仕様:
ダイナミクス・モデルは気象(雨、雪、氷)状態の路面での横滑り、ブレーキ性能を正確にシミュレートすること。
対応:
アンダーステアとオーバーステアの表現が可能です。アンダーステアとは、高速で走行する際、前輪の角度を低速の走行時より大きくしなければ車が同じように曲がらない現象です。速度が高すぎるとステアリングハンドルを回しても車がほとんど曲がらないことがあり、安全な運転ができません。オーバーステアとは、曲がる途中に後輪が滑って通常より急な回転が発生する現象です。






ドライビングシミュレーション標準モデル UC-win/Road
-
ドライビングシミュレーションVRモデルの作成に加え、標準モデル下記4種を装備しています。いずれも中国の実際の道路をモデリングしたものでドライビングシミュレータの特著を効果的に活用できるリアルタイムVRモデルです。シナリオ機能や環境切替機能、キャビンや運動モデルの切替で柔軟な運転走行環境を提供します。

■都市道路VR データ
北京市内の「3 号環状線」を中心に中国首都特有の都市部道路ネットワークを再現。全線の道路標識、標線(中国GB5768-2009 基準対応)と案内板をモデリングし、現地ビデオ取材に従って配置。片側のみ4車線以上の広い道路幅員や、放射路と環状線交差箇所になっている「立体交差橋」など数十箇所を作成し、沿線の道路施設、建物も忠実に再現しました。また、2008 年オリンピックの会場である「鳥の巣」などのランドマーク建物を加え、北京都市環状線の特徴及び都市空間の全体感をリアルに表現しています。




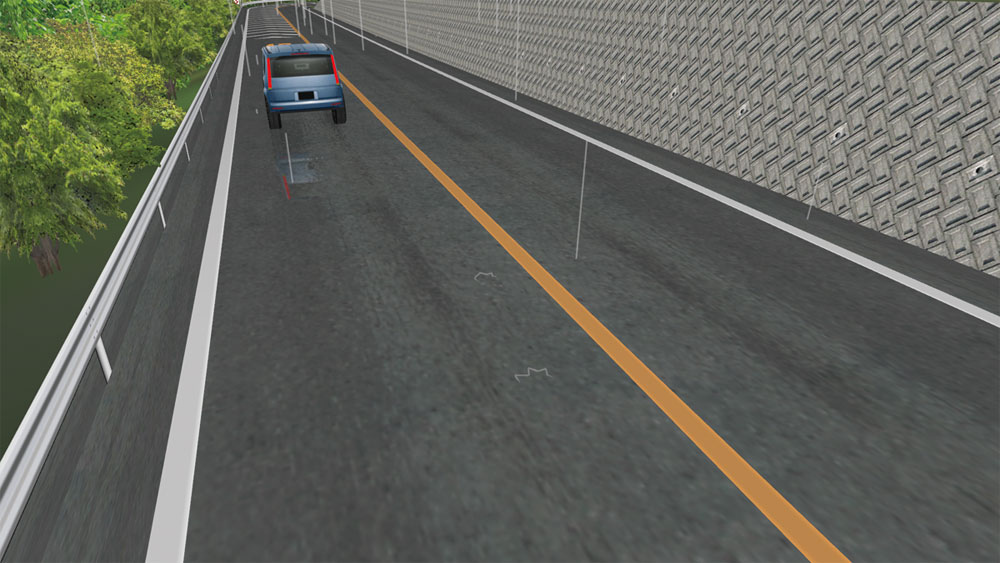
■高速道路VR データ
国道G110 の拡張業務を背景した実際のデータモデル。従来は2 方向2 車線の一般国道を分離式路盤の片側2 車線の国道に拡張となり、UC-win/Road を活用して建設中の拡張道路の設計図面に基づいたデータ作成を行いました。工事中のため大型トラックがメイン通過車両という特徴もリアルに再現し、雨、雪、凍結路面など各種特殊気象も走行シナリオの中に組み込んでいます。当システムのトラックキャビンにも入れ替られるという特徴に対して、最適な運転空間を想定し、車両とドライバーの感覚を忠実に再現したデータとなります。




■山岳道路VR データ
国道G109 の一部を再現したVR データで主に車両が異なる半径のカーブを通る際に、ドライブシミュレーターからドライバーに加速度感及び遠心力をリアルに感じさせるように道路構造を忠実に再現しました。空間中の連続カーブも現地のビデオ撮影を参考して作成し、道路横断面端部の側溝構造や、排水路、切土のテクスチャなど、全部現地の取材写真を参考して作成したものです。




■無限ループ道路データ
疲労運転という研究テーマをターゲットとして、新たに開発した「交通接続」機能を有効に利用して、ドライバーが無限に運転し続けるデータとなります。道路構造は中国で一般的な代表横断面を適用しており、交通流車両も実際現地取材より入手した道路情報を交通流に忠実再現しております。