功能和特长
 |
|
自律行驶系统
FORUM8在进行自律行驶演示系统的开发时,有以下三个子系统。
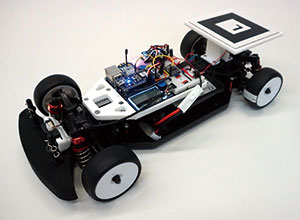
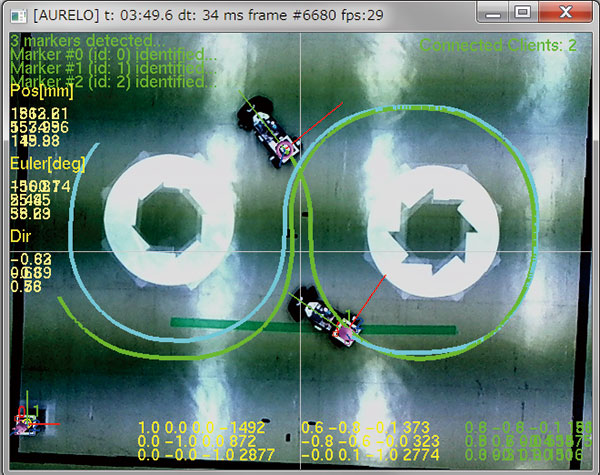
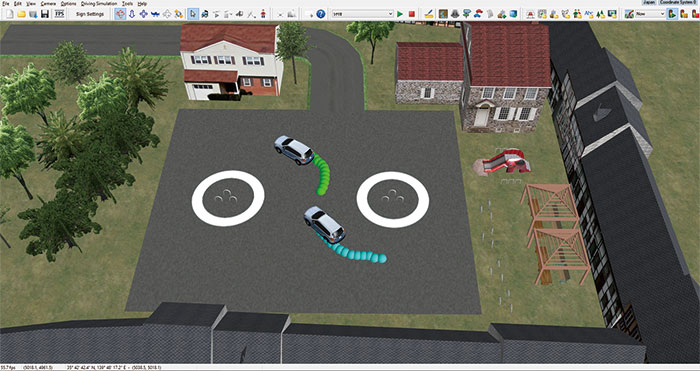
2台Lily Car为一个组合,基于AR(增强现实)的实时3D追踪系统(Aurelo、図2),在3D虚拟现实环境中的可视化(图3),图4是整体系统的照片。
在当前系统中,汽车在预先设定好的测试路线上自律行驶。可以自由切换手动模式和自动模式,并且通过PC控制界面和Aurelo系统的连接,获取汽车的位置和方向等信息。此外,可以向汽车发送命令根据所选的路线运行。在现阶段,实现了通过PC控制路线设计以及决策过程。
今后我们将开发由主控控制器控制汽车,并且仅通过位置数据传输到汽车就可以用GPS信息和车载传感器完成自律行驶。此外,我们计划开发一种监控系统,可以在汽车出现意外时可以自动躲避障碍物。
 |
 |
| ▲图2 Aurelo 3D 位置决定系统 |
▲图3 通过UC-win/Road的可视化 |
 |
| ▲图4 自律控制系统 |
|
|
.gif)