 |
Vol.3 2011.1. |
3D도면 서비스/3D모형 서비스/3D스캔・VR모델링 서비스 최신 정보
3D모형 서비스 / 3D스캔・모델링 서비스
●3D모형 서비스
포럼에이트에서는 [3D・VR엔지니어링 서비스]로써 [3D스캔・모델링 서비스], [3D모형 서비스], [3D도면 서비스]라고 하는 VR모델링이나 BIM에 관련된 3D엔지니어링 서비스를 제공하고 있습니다.
3D모형 서비스는 UC-win/Road나 UC-win/FRAME(3D)를 비롯해 UC-1시리즈나 Allplan등으로 출력되는 각종 3차원 모델을 3D프린터로 실제의 모형으로써 작성하는 서비스입니다. 포럼에이트에서는 잉크젯법에 의한 풀칼라의 3차원 모델 출력이 가능하고 조형 범위가 가로폭254mm×높이381mm×깊이203mm로 업계 최대 클래스이며 Z코포레이션사의 최상위 기종 Zprinter650을 사용하고 있습니다(사진1).
 |
| ▲사진1 Zprinter650 |
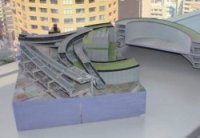
이번에 오사카대학 후쿠다 토모히로 준교수로부터의 의뢰에 의해 부젠다・호소에 꿈만들기 회의의 워크샵에서 사용하기 위한 거리 모형을 작성했습니다(사진2).
| 사진2 VR로 작성한 부젠다호소에 지구의 상점가를 Zprinter로 출력 (후쿠다 블로그 2010,11,08기사 [부젠다호소에 꿈만들기 회의:VR+3D프린터 모형]에서 사진 발췌. 【URL】http://y-f-lab.jp/fukudablog/index.php?e=1046) |
 |
부젠다・호소에 꿈만들기 회의란, 야마구치현의 시모노세키 부젠다에서 실시되고 있는 지역 문화의 계승・지역 문화의 활성화를 목적으로 한 워크샵입니다. 앞으로의 거리의 장래 모습이라고 한 이미지에서 도로나 아케이드를 향후 어떻게 정비해 나가야 하는가라는 구체적인 거리만들기에 대해서 활발한 논의가 교환되고 있습니다.
후쿠다 교수는 환경 디자인의 입장에서 이 워크샵에 관계되어 있으며 국내외의 거리만들기의 사례를 강연에서 소개하고 UC-win/Road로 작성한 VR을 검토에 이용하고 있습니다.
VR은 상점가의 시가지 아이디어를 교환할 때에 거리의 현상황을 파악하고 한층 더 장래의 이미지를 공유・검토하기 위해 활용되고 있습니다. 아케이드가 쳐진 기존의 상점가, 전선지중화나 아케이드 철거를 한 상태, 한층 더 가로수를 배치하고 오픈 카페를 이미지한 장래 모습이 순식간에 전환되는 VR데이터가 작성되었습니다.
| 현상황 | 지중화 | |
 |
 |
|
| ▲그림1 부젠다・호소에 꿈만들기 회의에서는 VR데이터로 작성된 부젠다호소에 지구의 현상황 제안 이미지를 활용하여 검토가 실시되고 있음 |
||
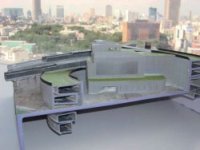
| ▼그림2 3D프린터로 출력된 모형의 예 | ||
 |
 |
 |
| ▲사쿠라다몬 주변 | ▲토카이칸죠우 | ▲오오하시 정션 |
 |
 |
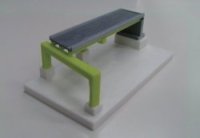 |
| ▲오오하시 정션(1) | ▲오오하시 정션(2) | ▲취수 게이트 |
위에서 소개하고 있는 이미지는 각각 현상황 이미지와 장래 모습의 제안 이미지가 됩니다.(그림1). 배치하는 가로수의 수목에도 복수의 종류를 이용하는 등 다양한 검토가 실시되고 있습니다.
후쿠다 교수는 [디자인이나 VR의 전문이 아닌 분이 꺼리낌 없이 자유롭게 디자인 검토・VR조작하는 것을 생각하면 아직도 해야 하는 것이 있다(후쿠다 블로그에서)고 생각하고, 3D프린터에 의한 모형의 작성과 모형을 VR과 연계시킨 시스템으로 사용하는 것을 고안했습니다.
모형 제작에는 VR데이터를 그대로 이용하고 있습니다. FORUM8 AZ의 고바야시 요시히로씨에 의해 개발된 플러그인(Povray to Max)을 사용하여 도로나 교차점 등의 모델을 UC-win/Road의 VR데이터로부터 3dsMax로 변환을 실시했습니다. 한층 더 모형 출력을 위한 전용 소프트Magics을 이용하여 폴리곤의 상태를 최적화하고 Zprinter650로 출력하고 있습니다.
출력된 모형은 VR로 작성한 부젠다호소에 지구의 상점가의 약 600m의 구간을 축척1/500로 작성한 것입니다. 전체길이는 약 1.2m가 되지만, 혼자서도 들 수 있을 정도의 사이즈로 할 것을 생각해 모형을 5분할 했습니다.
분할한 모델은 2회로 나눠서 출력되어 토탈로 약 24시간 걸려 모형이 완성되었습니다. 통상의 스티로폴이나 판지, 나무 등을 사용한 모형 작성에 걸리는 시간과 비교하면 풀칼라의 모형 작성으로써는 대폭의 시간 단축이 가능하게 되어 있습니다.
UC-win/Road로 작성한 도로・교차점・주변 건물의 모델을 재현한 이 모형은 후쿠다 준교수가 개발하고 있는 도시 프리젠테이션 시스템에서 이용될 예정입니다.
도시 프리젠테이션 시스템이란 UC-win/Road의 VR데이터와 모형을 연계시킨 시스템입니다. 레이저 포인터로 모형을 포인트하면 그것을 센서가 읽어들여 VR공간에서 포인트된 장소로의 이동이나 시선방향의 변경을 할 수 있기 때문에 모형, Web카메라, 레이저 포인터, VR공간을 표시하기 위한 디스플레이와 UC-win/Road에 의해서 구성되어 있습니다. VR공간을 보면서 모형상의 시선을 향하게 하고 싶거나 또는 이동하고 싶은 위치를 레이저 포인터로 가리키면 그 위치가 Web카메라로 취득하여 디스플레이의 VR공간상에 반영됩니다. 실제로 접하여 직관적으로 이해할 수 있는 모형과 교통의 표현이나 기상의 전환이라고 한 시뮬레이션을 유연하게 실시할 수 있는 VR의 각각의 장점을 조합시킨 시스템이라고 말할 수 있습니다.
또한 이 시스템에 대해서는 『토목 건축 엔지니어의 프로그래밍 입문 -Delphi로 배우는 VR, 구조 해석의 SDK활용 프로그래밍-』(닛케이BP사 간행)에서 상세하게 해설되어 있기 때문에 흥미를 가지고 계신 분은 꼭 참고하여 주십시오.
●[3D스캔 서비스]
포럼에이트에서는 3D레이저 스캐너를 이용하여 건물이나 도로 등을 3D스캔하고 모델링을 실시하는 [3D스캔 서비스]를 실시하고 있습니다. 3D레이저 스캐너는 매초5000점의 속도로의 계측이 가능하고 지형이나 건물의 계측, 측량 등에 있어서 높은 실적이 있는 제품입니다.
UC-win/Road Ver.5의 점군 모델링 플러그인을 사용하면 스캔한 데이터를 점군 모델로써 임포트, 건물이나 교량 등 기존의 시설의 형상을 VR상에서 정확하게 표현할 수 있습니다. xyz, csv, txt, asc등의 각 포맷의 임포트에 대응하고 있으며 좌표와 색정보의 임포트도 가능하게 되어 있습니다. 여기에서는 본 서비스에서 수주한 업무의 일부를 소개합니다.
| 그림2 자동차가 진입할 수 없기 때문에 MMS(좌)에서 계측할 수 없는 장소에서는 거치형의 3D레이저 스캐너(우)를 이용. 이러한 점군 데이터를 합쳐서 VR데이터를 작성하고 있습니다. |
 |
기업이 보유하는 건물의 개수 플랜을 위해 전방향으로부터 건물의 계측을 실시하는 업무에서는 계측한 점군을 이용하여 소프트웨어내에서 어긋남을 조정함으로써 오르소화상을 작성했습니다. 외벽의 치수를 계측하여 입면도를 일으키는 대신에 기존 건물을 계측한 데이터를 이용하여 개수의 계획에 이용하고 있습니다.
점군 계측에서는 MMS(미츠비시 모빌・맵핑・시스템)가 잘 알려져 있습니다. 이것은 GPS안테나, 카메라, 레이저 스캐너를 일체화 한 유닛을 탑재한 차량으로, 도로를 주행하면서 스캐닝을 하는 기술입니다. 이 시스템에서는 도로를 따른 대량의 점군을 자동적으로 계측하지만, 자동차가 들어가지 못하는 장소의 계측을 실시할 수는 없습니다. 한편, 포럼에이트에서 사용하고 있는 3D레이저 스캐너는 거치형이기 때문에 이 MMS의 약점을 보충하는 형태로 차량이 들어갈 수 없는 좁은 장소나 도로로부터 떨어진 장소의 계측을 정점으로부터 실시할 수 있습니다.
현재, 어느 기업의 부지 전체와 주변 도로 및 도로를 따른 주변 환경을 통째로 MMS로 계측하는 프로젝트에 관계되고 있습니다. MMS를 보완하는 형태로 레이저 스캐너로의 계측을 실시하여 MMS와 레이저 스캐너 쌍방으로부터의 점군을 UC-win/Road Ver.5 로 임포트한 후에 한층 더 점군을 참조하여 VR데이터를 작성하고 있습니다.
또한 동경농업대학의 야마자키 모토야 교수, 키나미공업대학의 카와무라 아키라 교수와 함께 실시하고 있는 점군 계측의 공동 연구에서는 시부야 교차점과 니혼바시 중앙로의 계측을 실시하고 있으며, 이 중에서 시부야 교차점의 점군 데이터는 UC-win/Road Ver.5에서 샘플로써 수록하고 있습니다.
포럼에이트에서는 여기서 소개한 3D모형 서비스, 3D스캔 서비스에 더불어 BIM대응 3D도면 작성 옵션/보고서・도면 토탈 서비스와 합친 [3D・VR엔지니어링 서비스]를 전개하고 있습니다. 꼭 이용하여 주십시오.
 |
| ▲그림3 점군 계측에 의한 시부야 교차점 데이터 UC-win/Road Ver.5에서 샘플로써 수록되어 있음 |
| 인덱스 | 다음페이지 |

