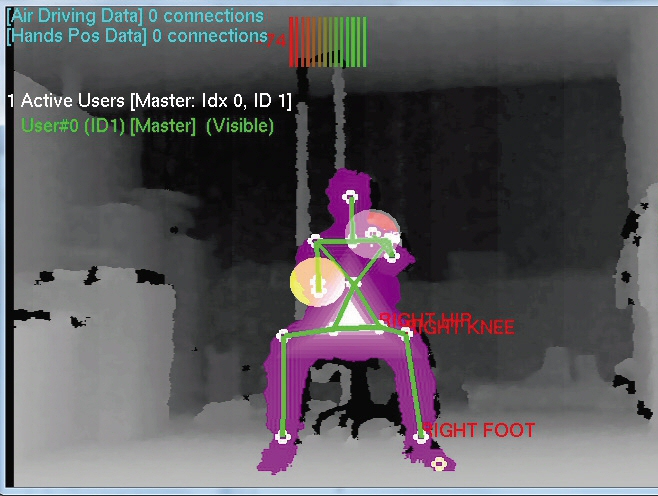
| Kinect插件使用Depth感测器的数据。对应设备为KinectTM Sensor for Xbox、Xtion Pro、Xtion Pro Live。这三种感测器以PrimeSense技术为基础,投影红外线圆点图案,探知红外线照相机。人的眼睛虽然无法看清(周波数大约为780nm)、但 可使用有暗视功能的照相机捕捉(图1)。在障碍物进入感测器的探知区域时,因为雷射的模样变乱,感测器可製作摄影领域的Depth Map。并且,分析Depth Map,还可判断形状。更详细的分析使各种的形状与人体的形状结合,判断人的骨格。 |  ▲图1 红外线雷射 |