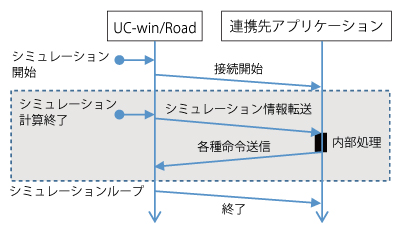
| 一旦开启模拟项目,就会自动与UC-win/Road协作的应用确
立好链接。之后,每当在UC-win/Road上做过模拟结果都会发送到链接好的应用上,以便在应用上处理结果。另外,可以按照处理结果,自动回复模拟的
控制和信息的表示等的命令。 本功能所提供的内容,是装载着协作功能UC-win/Road的选项插入和协作的应用的抽样程序以及源代码。 |
 模模拟系统的协作性提高 |
||
| ▲图1 协作处理的过程 | |||
| New Products | ||
|
||
|
|
| 模拟系统的协作性提高 |
| 交通模
拟和驾驶模拟会被利用在各项研究开发上。例如,自动驾驶,V2X,驾驶支援,控制交通,IoT等研究开发项目。我们可以以动画和数值结果,在许多情况下反
复驾驶,或者对驾驶的结果进行进一步的分析与说明。不过,如果想让它有更动态的反应时(例如,控制装置,驾驶支援,事故对策等)需要与实时模拟系统进行协
作。 这次我们发布了 以UC-win/Road SDK相似的各种系统构建的成果为背景,且可以改善协作性的「实时模拟协作选项」。我们可以利用这个新功能,把VR空间的模拟结果转送到TCP/IP上, 也可以利用在自车驾驶控制的重写或HMI模拟专用消息以及画面的HUD表示指令上。而且,在这里还提供了「系统选项」这一新的结构,以便对应个别的需求, 如协作项目和自定义命令。 |
| 协作机能的概要 |
|
||||||
| 协作可能的内容 |
以下是可从UC-win/Road得到的情报。
另外,在对模拟中的各个对象发送特定可能的ID情报,使用各利用者的群族构成,若干个驾驶者同时在假象空间内驾驶时,各个驾驶者的车辆情报也会被发送,而 且各个车辆的控制说明也可以被发行。 |
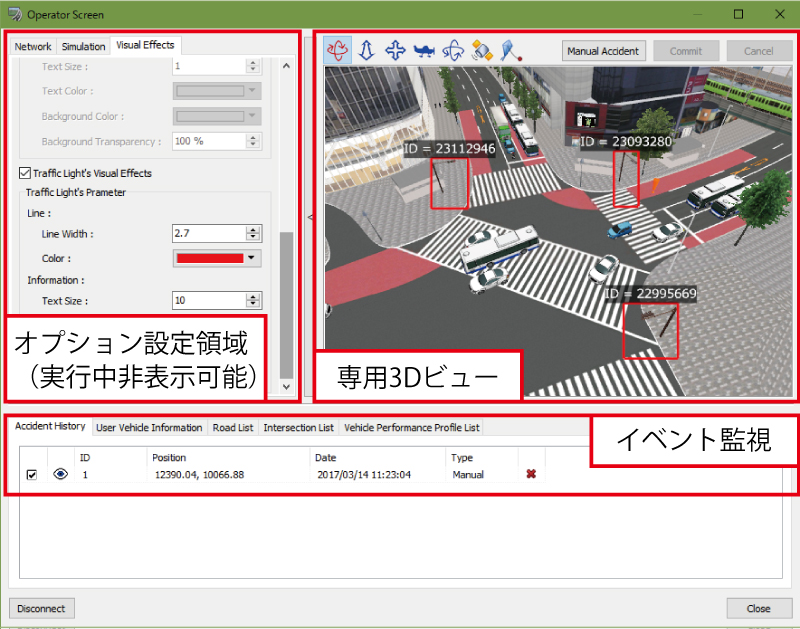
| 协作运用者画面 |
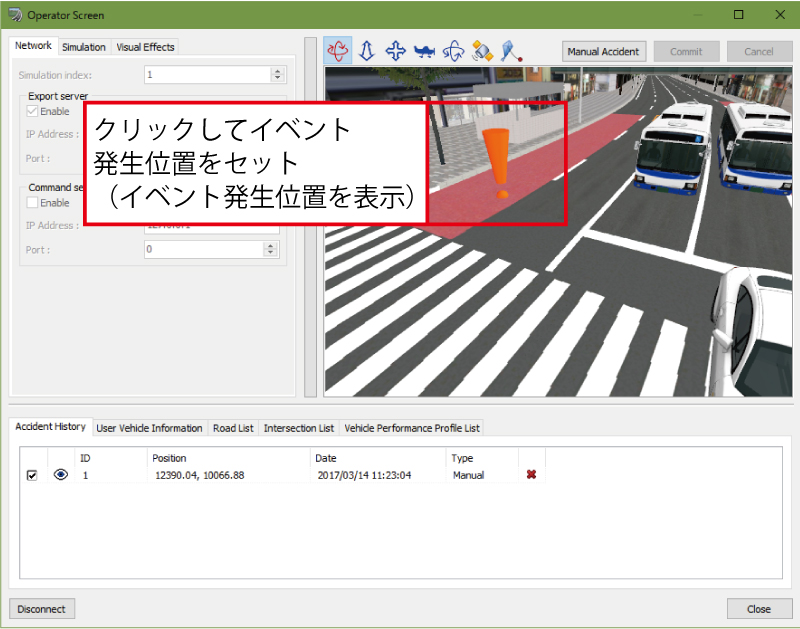
我们准备了为监视和控制协作的项目。添加了连接的始终设定和连接对象的设定,我们可以进行各种设定,如,专用3D画面的行人,车辆,
信号灯等的情报表示,模拟事故发生的追加和删除,自车追突事故的监视等。
|
||||||
| 与SILS的组合 |
| 我们可以把本功能与UC-win/Road
Ver.12のSILS功能组合起来,达到以正确的周期来实施模拟,可以达到比实时还要快的效果。可以在自动驾驶和测量模拟的反复实验时,达到有效的工具
效果。 |
| (Up&Coming '17 春季号) | ||
 |