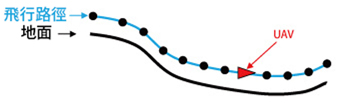
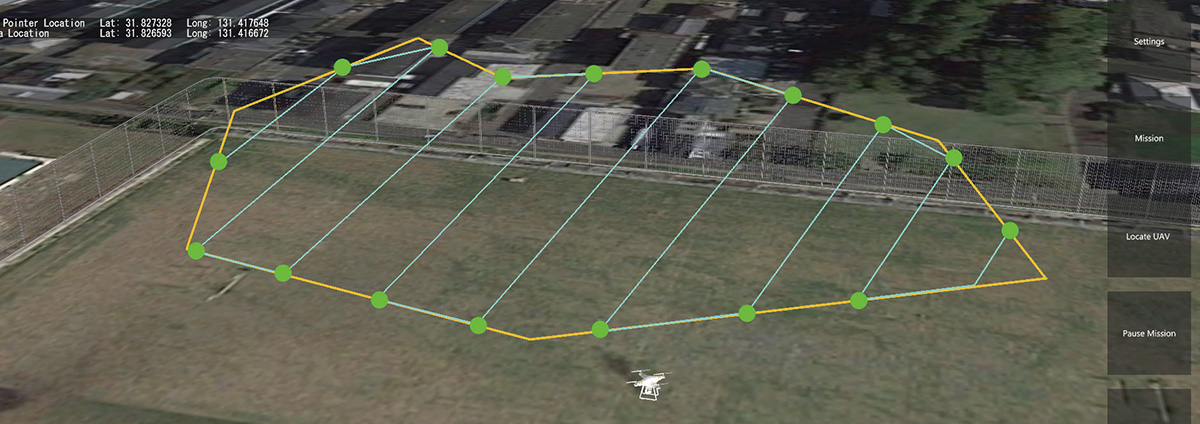
可以透過設置繪圖的位置與範圍、重合係數和解析度等參數進行任務預覽,從而確認攝影範圍和預想飛行途徑(圖1)。
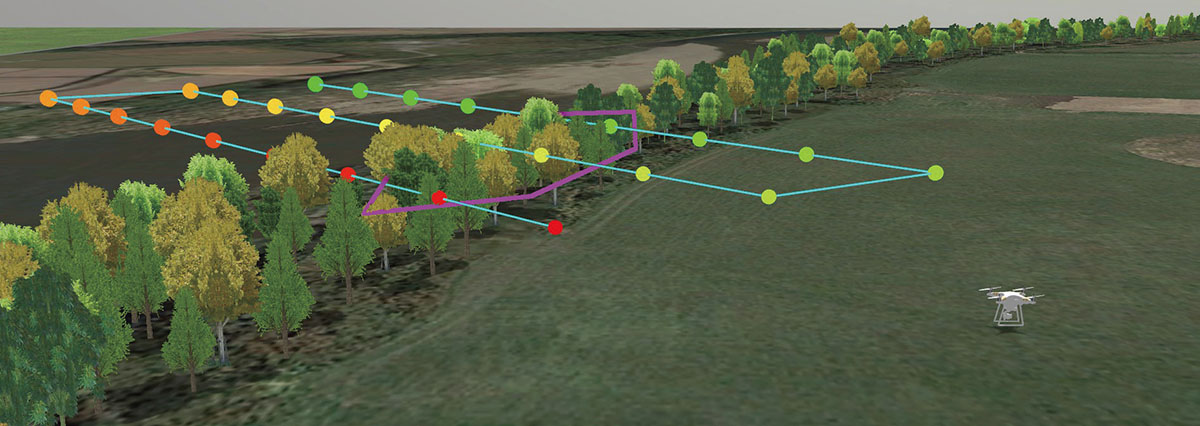
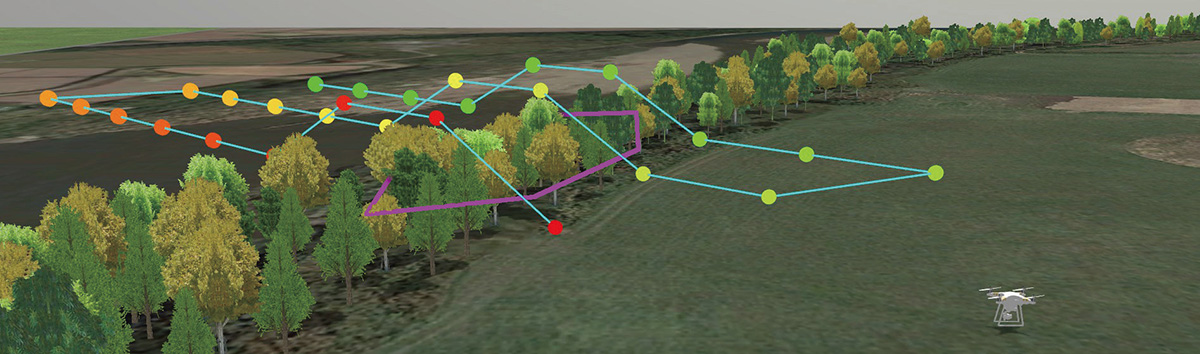
確認預覽後點擊「實行」鍵開始飛行任務。UAV將自動起飛並且沿著制定好的路徑飛行、拍攝照片。將會自動著陸在最後的拍攝地點或者起飛地點,著陸後,飛行任務中拍攝的照片的縮略圖顯示在實際的位置上時繪圖任務的預覽完成(圖2)。由此便可以確認將繪製任務進行預覽,在下載全解析度的照片前確認照 片拍攝情況是否正確。
 |
 |
| ▲圖1 繪圖任務的預覽畫面 |
▲圖2 已完成的繪圖任務預覽 |