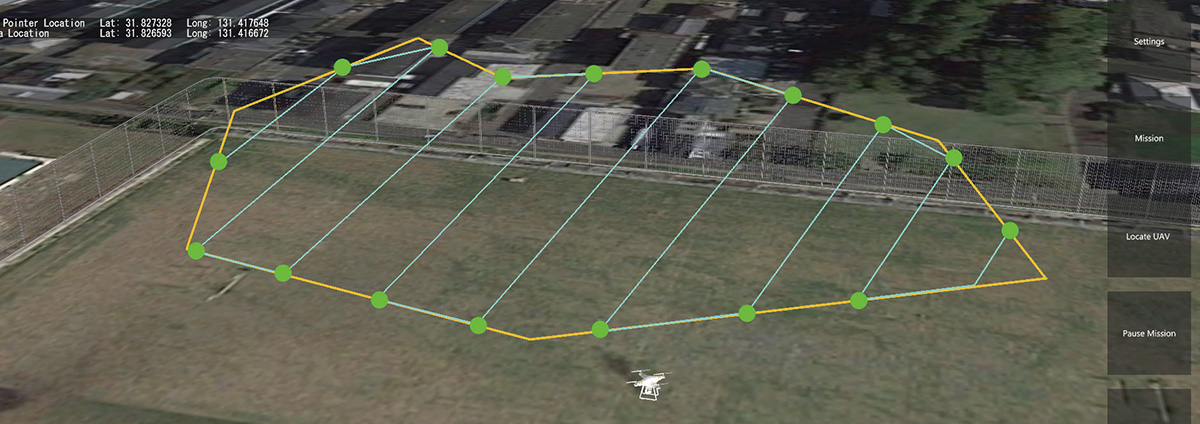
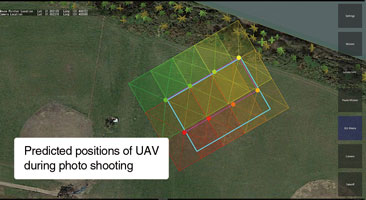
Các thông số như vị trí và phạm vi lập bản đồ, hệ số chồng chéo và độ phân giải điểm ảnh có thể được thiết lập, phạm vi chụp và đường bay dự kiến có thể được kiểm tra trong bản xem trước khi thao tác lập bản đồ kết thúc (Hình 1).
Sau khi xác nhận việc xem trước, bấm vào nút "Start" để bắt đầu chuyến bay quan sát. UAV tự động cất cánh, bay theo đường dẫn đã định và chụp ảnh. Nó sẽ tự động rơi điểm chụp vào vị trí hạ cánh hoặc cất cánh.
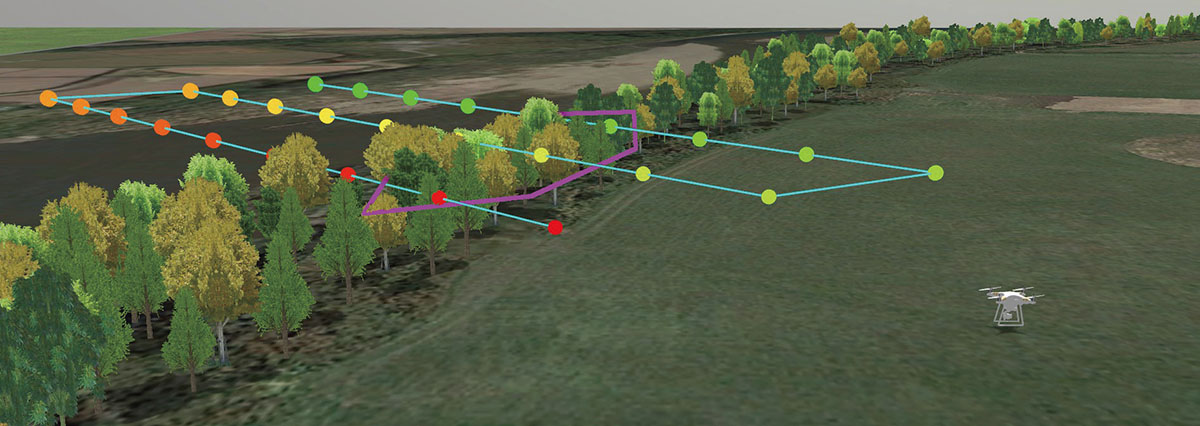
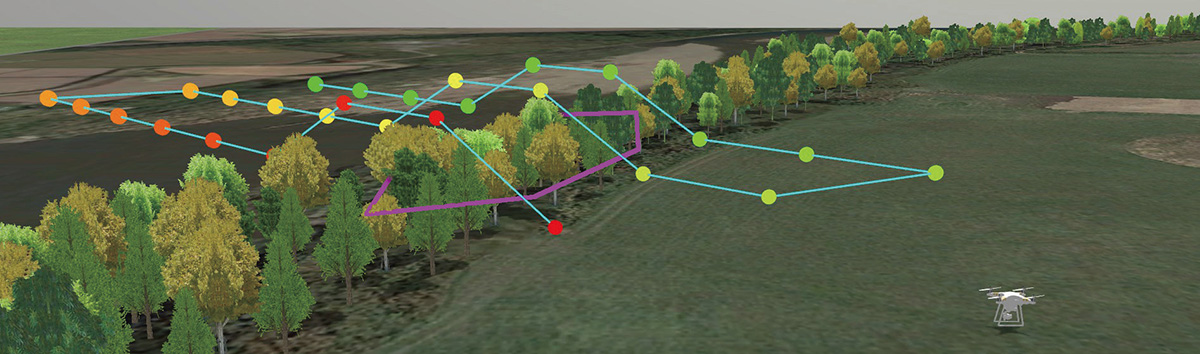
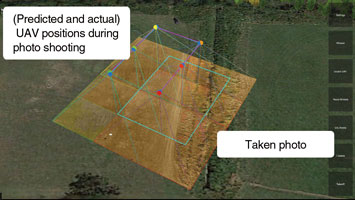
Trong bản xem trước của nhiệm vụ lập bản đồ, hình thu nhỏ các hình ảnh có được khi UAV bay được hiển thị trên các vị trí thực tế (Hình 2). Điều này cho phép bạn kiểm tra kết quả nhiệm vụ lập bản đồ và tính đúng đắn của hình ảnh trước khi tải xuống ở độ phân giải đầy đủ.
 |
 |