|
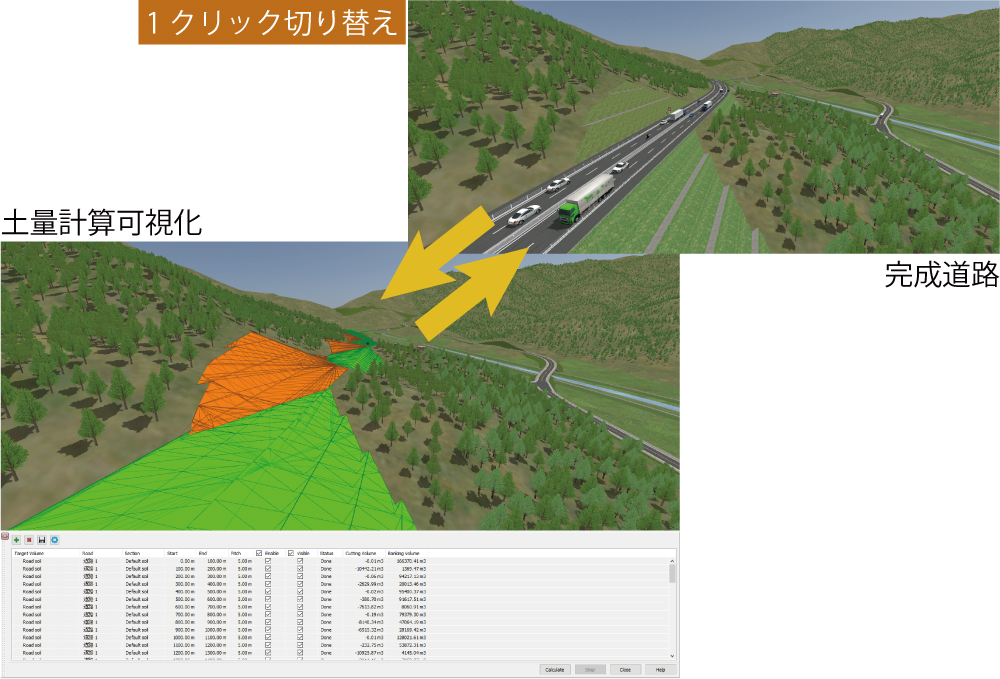
UC-win/Road Ver.13的新功能增加了土量計算功能。這個土量計算功能可以用程式製作道路和3D形狀,並可以計算道路的概算土量(圖1)。 我們一直都在集中著手於土木工程領域3D數據的運用,利用3D形狀進行數量算出的嘗試一直在進行。本功能的計算方法不是以往的平均斷面法,而是使用3D形狀計算土量的方法。 可以計算路面與地形面的交點,並將其劃分為路面上方區域(=填方區域)和路面上方路面(=挖方區域)上方區域。 使用分割後的3D表面形狀數據計算上表面和下表面之間的體積。 對於計算時產生的路面,不同於以往對道路斷面的設置,這次改版可以定義土木工程的斷面部分。同時和以往定義道路斷面一樣,由建築基礎部分和填方/挖方的法定平面來定義。另外,使用現有路段可以自動創建預設的土工斷面,所以只需要像以往那樣製作數據,便可計算土壤量,不需要任何其他輸入 (圖2)。 在計算土量時,可以透過輸入目標道路,土工斷面、區間(起始距離、結束距離)以及所產生的路面坡度來定義。 可以一個一個地定義,但是如果要計算每個固定區間的土壤量或者是計算從斷面的開始到結束每個區間的土壤量,可以一併定義這些數據並進行製作。透過對每個區間進行計算,我們可以探討哪個區間的土量成本較大。也可用於多個土工斷面的不同斷面的比較研究。 |
|

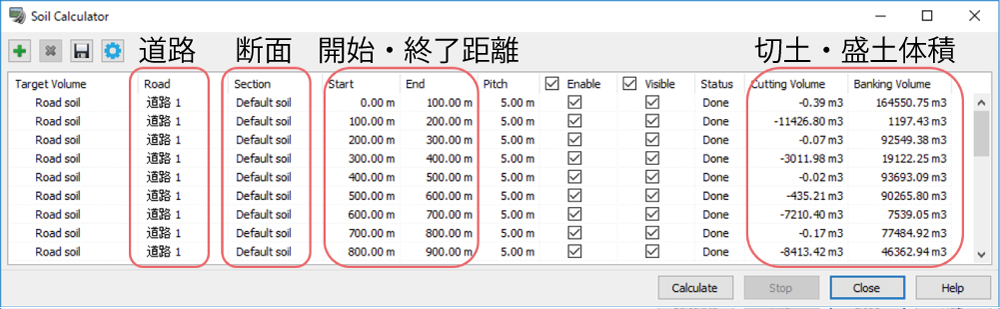 |
| 圖3 土量計算的定義 |
當執行計算時,在土量計算畫面上顯示挖方和填方的體積。 此外,如果在3D畫面上啟用顯示,則可以用設定的顏色顯示挖方和填方表面,並且可以以可視方式掌握土壤的數量。考慮到與表格計算軟體的連接,可以將結果輸出為逗號分隔的CSV或制表符分隔格式。
最後,UC-win/Road Ver.13作為道路目標的土體積,作為土體容積計算函數來實現。未來我們計畫擴充土量計算功能,包含對應計算結構物的體積、土地開發的土量計算等。