| New Products & Service | |||||||||||||||||||||||||
|
Autonomous Driving Package Safe Driving Simulator has been certified by the National Public Safety Commission. ●PriceTBD ●Release January 2021 |
|||||||||||||||||||||||||
|
Among many types of simulations available in UC-win/Road, the autonomous driving package is expected to be used in "autonomous driving study simulation", "ADAS", and "sensor data simulation" (Fig.1). It is a packaged UC-win/Road plug-in that consists of the plug-ins in Table 1. 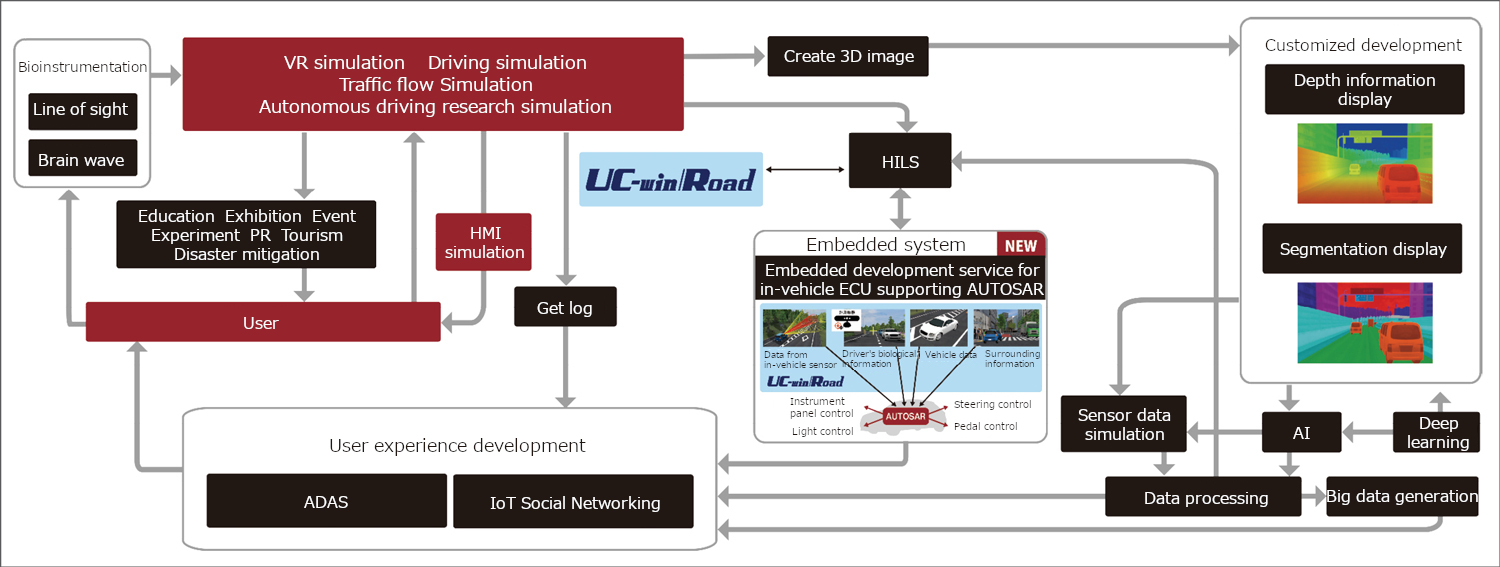 Fig.1 Relationship between the UC-win/Road VR simulations and the autonomous driving package
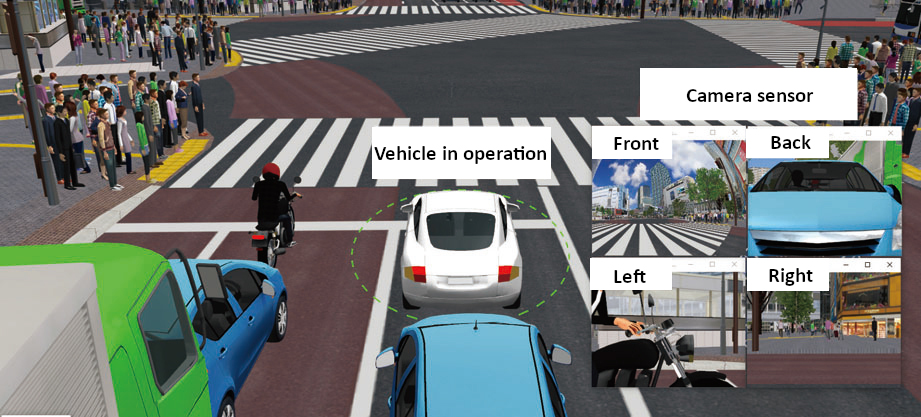
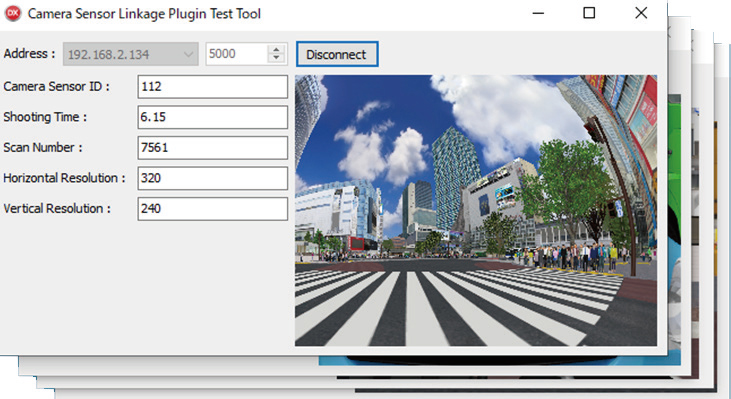
Table 1 Overview of the autonomous driving package *2 Plug-ins that are already released. (Introduced on Up&Coming No.117) *3 Expanded function for Camera Sensor Base plug-in *4 Expanded functions of Lidar Sensor plug-in Driving Data IO Application This application is independent from UC-win/Road and transmits steering angle, acceleration, and brake data of the vehicle in operation from the IO device to UC-win/Road. It also receives driving data from UC-win/Road and reflects the data such as the force feedback to the IO device. The initial edition will support a game controller (Logicool G29) and InnoDS CDS / MDS / MotionDS (3DOF), and will correspond to SENSO Wheel and so on in the future.  Fig.2 Driving data IO application Vehicle Control Plug-in The vehicle control plug-in cooperates with external vehicle dynamics models and transmits data of vehicle in operation to external systems for operating the vehicle from the systems. (1) Cooperation with CarSim Reflects the vehicle motion calculated by CarSim (Virtual Mechanics Corporation) to vehicles in UC-win/Road. (2) Cooperation with other external vehicle dynamics model Cooperates with external vehicle motion models such as HILS. The vehicle control plug-in transmits vehicle data required for motion calculation, receives vehicle motion result data sent from the calculation software, and reflects the data to vehicles in UC-win/Road.  Fig.3 Selection of vehicle model (3) Cooperation with driving data IO application Cooperates with driving data IO application via TCP and UDP communication. External vehicle dynamics models receive vehicle data (pedal, steering angle, etc.) sent from external devices and reflect to the vehicle in operation in UC-win/Road at last. 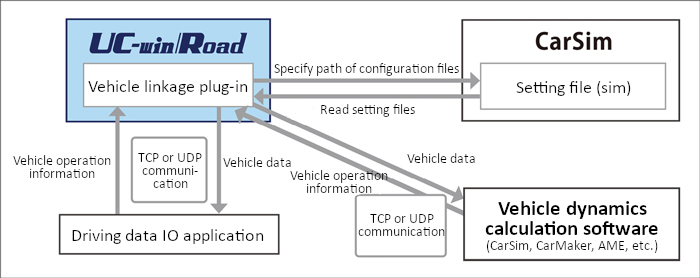 Fig.4 Linkage between vehicle Control plug-in and driving data IO application Camera Sensor Simulation System The camera sensor simulation system processes cameras set in UC-win/Road and generates distorted images to make it closer to images shot with real camera. By installing a camera separate from the main screen of UC-win/Road at the installation positions of each sensor, users can check the images taken by each sensor during driving. In addition, images can be sent to external systems via UDP communication. We will continue to develop functions to visualize the range that can be drawn with the camera sensor and to record the sensor display.
|
|||||||||||||||||||||||||
| (Up&Coming '20 Fall issue) | ||
|

