| New Products & Service | シミュレーション | ||||||||||||
|
3次元リアルタイムVRシミュレーション ●新規価格Ultimate:1,920,000円 Driving Sim:1,280,000円 Advanced:970,000円 Standard:630,000円 ●リリース2021年2月 |
|
||||||||||||
|
前回ご紹介を行った開発中のUC-win/Road Ver.15.0について新機能の新しい取り組みについて説明いたします。 C++ API 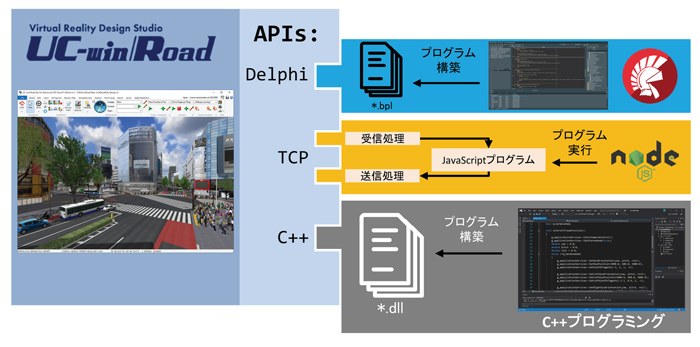
図1 C++ API これまでUC-win/RoadにはDelphi用のインターフェースであるUC-win/Road SDK、TCPを用いたインターフェースとしてシミュレーションリアルタイム連携プラグインがありましたが、新たにC++用のインターフェースが追加され、C++言語を用いてUC-win/Road用のプラグインを開発することが可能となります。(図1) 本APIの主な特徴については以下のようになります。
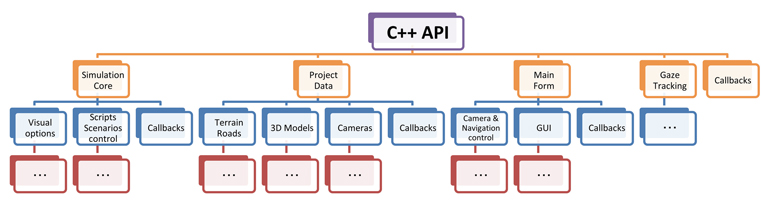
図2 C++ API構成 Ver.15でのリリースでは、現在のUC-win/Road SDKで利用者が多いドライビングシミュレータに関わる部分の公開を重点的に進める予定で、以下のようなデータの取得や、機能が使用できる予定です。
本APIについては、サンプルプラグインと、そのソースコードも同梱する予定です。サンプルプラグインの内容としては下記のようなプラグインを試すことが可能です。
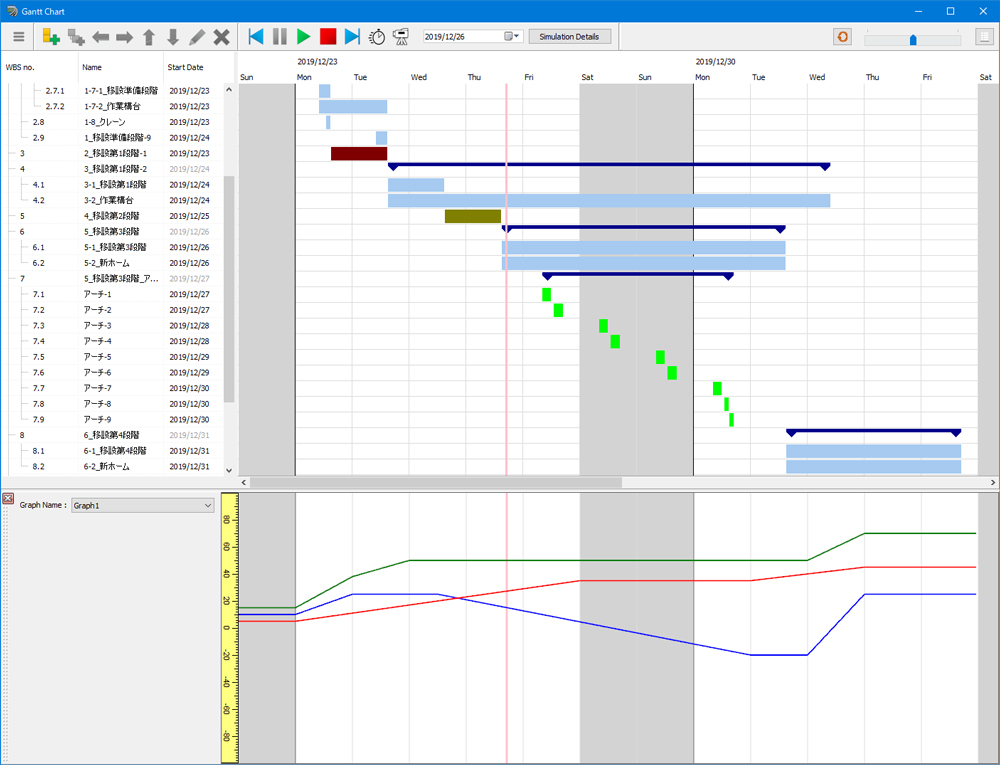
また、各種開発環境での使用方法のドキュメントを提供し、UC-win/Road SDKセミナーでの講習など、ユーザーが使用しやすいようにしてまいります。Ver.15でのリリース後も機能拡張を続け、将来的には現在のUC-win/Road SDKの機能を網羅し、さらに拡張したAPIとなるように取り組んでいきます。 nD多次元シミュレーション 4Dシミュレーション機能により工程データと3D空間の連携で工事の作業の流れの可視化が可能になり、施工スケジュールについて合意形成や3D表現による実現性確認や関係者の誤解解消に活用できます。Ver.15ではここからさらに1次元拡大して工程のコストや作業量、資材数などを変数として扱えます。変数データは時間的な変化を数式で与えることが可能で複数の変数を数式に盛り込むことで相互変化をグラフで表示できます。グラフはガントチャート下に表示して連動しますので時間的な変化を3D、ガントチャート、グラフで同時に確認できます。 3D表示や施工スケジュール、コストや数量をグラフで見える化することで施工に関わる安全確保、運搬経路、交通規制状況、資材状況、気象、時刻と日照、夜間照明等の条件を総合的に検討・計画・評価することが可能になりました。主な機能は以下の通りです。
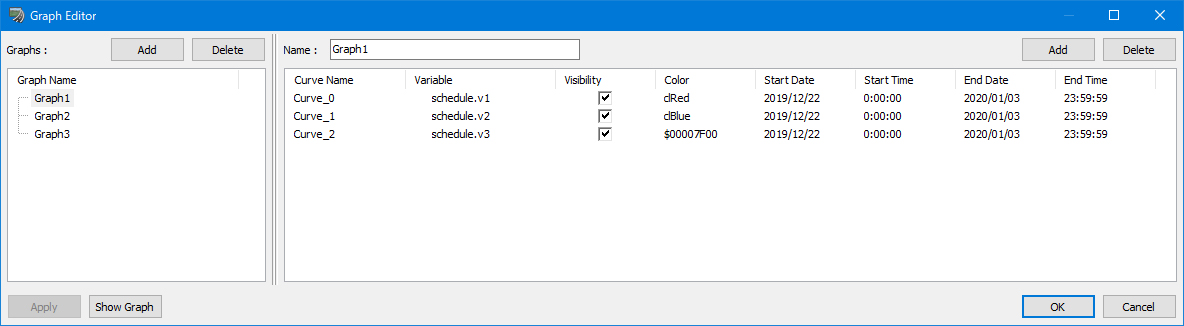
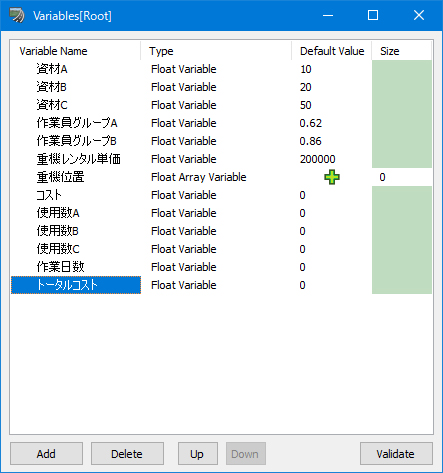
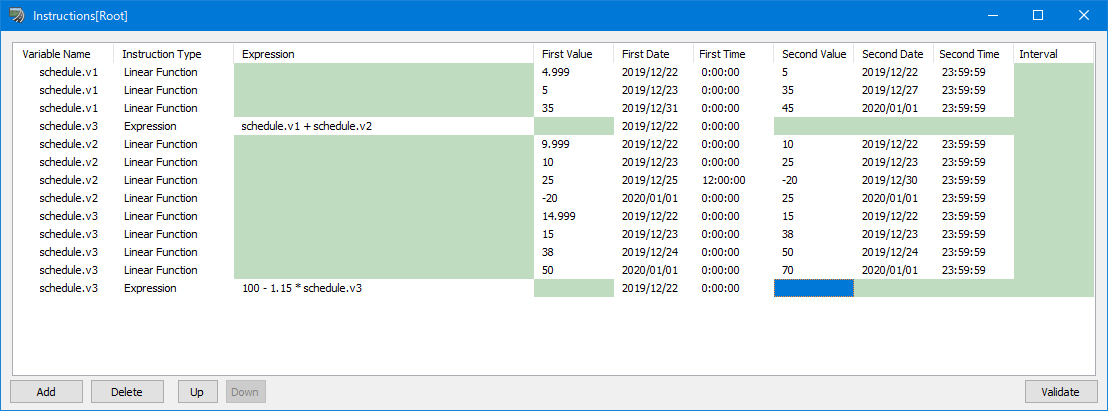
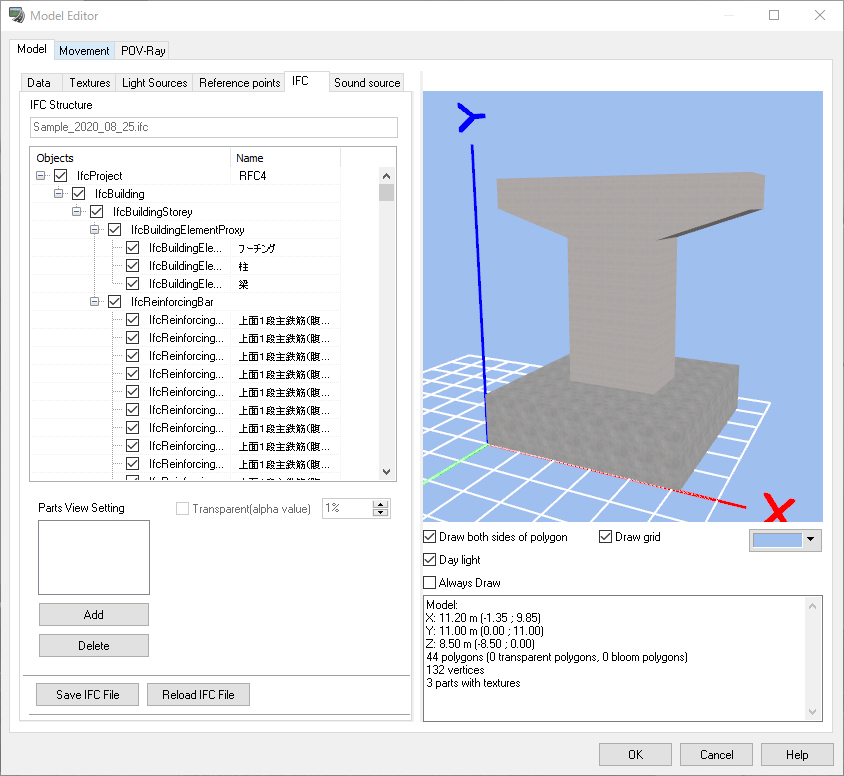
図5 グラフ表示の変数セットの定義・属性編集画面 今後は、空間的な演算ができる関数など、数式で扱える関数の追加を検討していきます。例えば、施工時に工事車両と作業員が接触するといった事象を検知できるような空間計測関数が必要と考えております。土木技術者におかれましては本機能によりVR技術がより身近で大変興味深いツールとしてご活用いただけるものとなりました。今後もより充実した機能に拡張していきます。 IFCファイル対応拡張 BIM/CIM対応強化の一環としてIFCファイルインポート機能を更新します。既存のIFCプラグイン・オプションは地形データのみが対象ですが、IFCファイルの構造物、鉄筋の3D形状をUC-win/Roadのモデルリソースとしてインポート可能になります。また、IFCファイル内に配置座標が定義されていればVR空間に自動配置します。 IFCファイルインポート機能概要
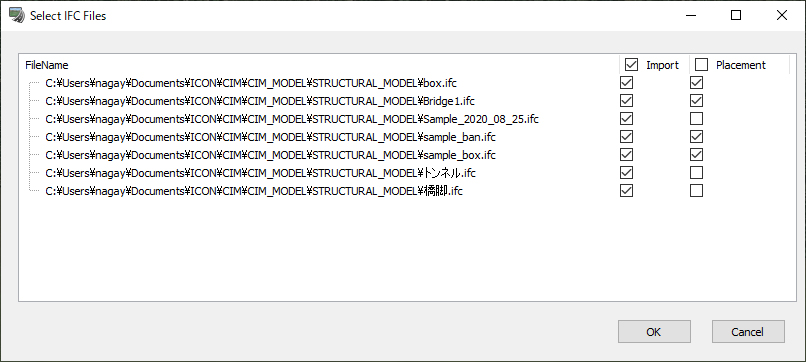
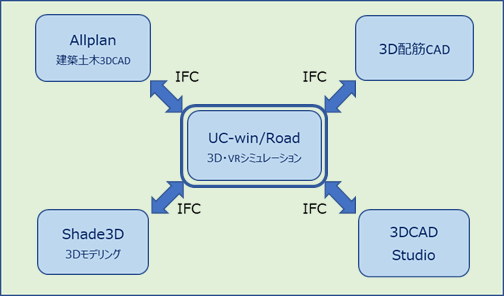
図6 IFC連携図、ファイル一括読み込み画面
本機能によりUC-win/RoadへIFCファイルの構造物、鉄筋の3D形状をインポートすることが可能となり、シミュレーションにIFCモデルを使用できます。例えば、パーツ毎の表示切り替え機能を利用して4Dシミュレーションと連動させることで施工状況確認が容易に行うことができます。また、インポートしたIFCファイルはプロジェクトにそのまま保持します。モデル編集後に初期状態に戻すことや、インポートした属性情報付きのIFCファイルを出力できます。 今後の予定として、形状の属性情報や施工管理情報などの確認・編集機能を検討しています。UC-win/Roadで形状の構造物寸法や鉄筋径などの属性情報を修正し、修正した情報をIFCファイルで構造設計ソフトウェアへ連携することで、モデル形状を修正後のものに容易に更新できる予定です。このように今後も製品間連携を強化してBIM/CIMのプラットフォームとして活用いただけるよう拡張していきます。 描画性能の改善 本バージョンで道路及び地形の3Dモデルの描画性能を向上させました。レンダリング処理に使用するデータの最適化により、CPUとGPUの利用バランスを改善し、比較的効率が悪い処理を削減し、処理速度を改善させました。一般的な都市空間で約30%のフレームレート改善、高速道路などで100%以上の改善も期待できます。 具体的には、GPU側で行うポリゴン描画計算は並列に行っていますが、表面の素材に関する属性が異なるポリゴンの並列処理ができません。素材属性を切り替えるたびに並列処理が一時停止しますので属性切り替えのオーバヘッドが大きくなります。 これまでは、道路を複数の区間に分割し、それぞれの区間に対し、属性切り替えのオーバヘッドが少ないようにしていましたが、今回からは、3D空間上で道路全体を統括的に最適化した結果、オーバヘッドを大きく削減できました。また、地形についても同様な最適化を行っています。 さらに、Frustum Culling処理(視錐台に入っていないオブジェクトを先に除外して描画しないようにする処理)を8分木(図8)の活用により大規模空間においても高速に行えるようにし、道路と地形のレンダリングフローをさらに改善しています。  図8 道路モデルの8分木によるモデル分割の例 ステアリングハンドルに関する改善 ドライビングシミュレーションでは、ドライバーにフィードバックされる刺激のうち、映像、音、ハプティックフィードバックの3つが重要で、今回ステアリングハンドルのフォースフィードバック機能を拡張しました。反力のモデルに走行時にタイヤに対して発生する横力を考慮し、車両の運動状態や車両の特性を表現します。HMIに関する研究開発用として走行時のパラメータ変更が可能で、シナリオの状況に応じて反力を変化させることが可能です。本機能は、ゲームハンドルコントローラーやMicrosoft DirectInput互換性デバイスで使用できます。 また、デバイスによっては多少のパラメータチューニングが必要になりますので、デバイス切り替え時の利便性を考え、ゲームコントローラー連携機能について、従来の設定項目を含めデバイス毎の設定を保存する機能を追加いたしました。 |
|||||||||||||


| (Up&Coming '21 新年号掲載) | ||
|

