| New Products & Service | Simulation | ||||||||||
●ReleaseMay 2021 *Coming soon to the F8 HQ Showroom |
|||||||||||
|
F8 Mobility Project The purpose of this project is to simulate Personal Mobility Vehicle (PMV) and transport equipment. We envision simulations of the latest mobile devices such as electric scooters, Segways, and electric unicycles (Fig. 1.b), as well as mobility support devices such as electric wheelchairs and electric carts (Fig. 1.a).
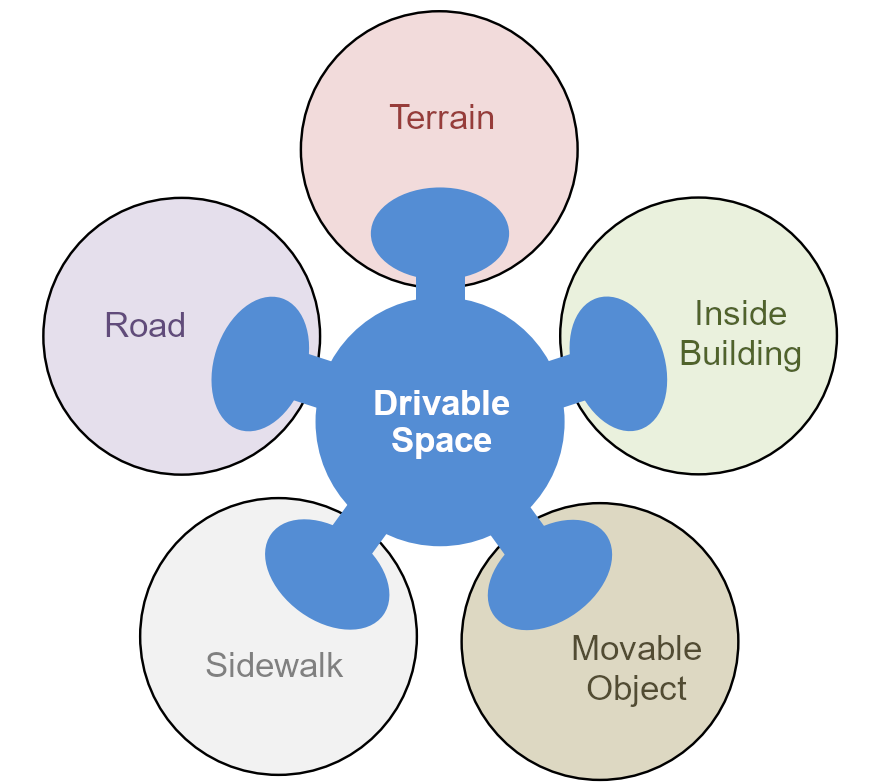
One of the motivations of this new development policy is that people are requesting more and more to the independence and mobility since we can live longer and healthier due to the progress of medicine in the current situation where the proportion of elderly people is increasing. Another reason is that the appearance of new transportation in urban areas and the progress of autonomous driving mobile equipment will change the way of thinking of mobility means greatly. Moreover, thanks to the reduction in price of lithium batteries and sensors in recent years, we can manufacture small and high-power PMVs, leading to the expansion of these new technologies. Simulations in UC-win/Road UC-win/Road supports moving objects on the land, on the sea, and in the air. You can control movements of the objects by input devices (such as joystick and steering) and simulate the transfer on foot or using vehicles and bicycles. To perform the driving simulation of PMVs in the VR environment, we will expand UC-win/Road functions for driving and traveling simulation to enable the vehicle control on pedways and inside facilities such as buildings, stations, and shopping malls. In the simulation, it is planned that PMVs will be able to "board" moving objects such as elevators and trains. Therefore, we will model a part of the VR space as "drivable space" where PMVs can access. This space can be defined by integrating every single object in the VR space such as terrain, roads, pedways, indoors of buildings, and movable objects, and PMVs can "move" from one object to another (Fig.2).
Ultimately, we will improve the crowd simulation function so that the simulation target pedestrian crowd detect the collision with PMVs in advance and avoid the vehicles in real-time. Development of Wheelchair Simulator At the first step, we will develop focusing on the wheelchair simulation indoor and outdoor. We will get the R&D model of WHILL Model C2 Wheelchair (Fig.3) and use it as the development platform. The main benefits of this model are that it is easy to access users' joystick operation information and that it can integrate sensors for autonomous driving function development.
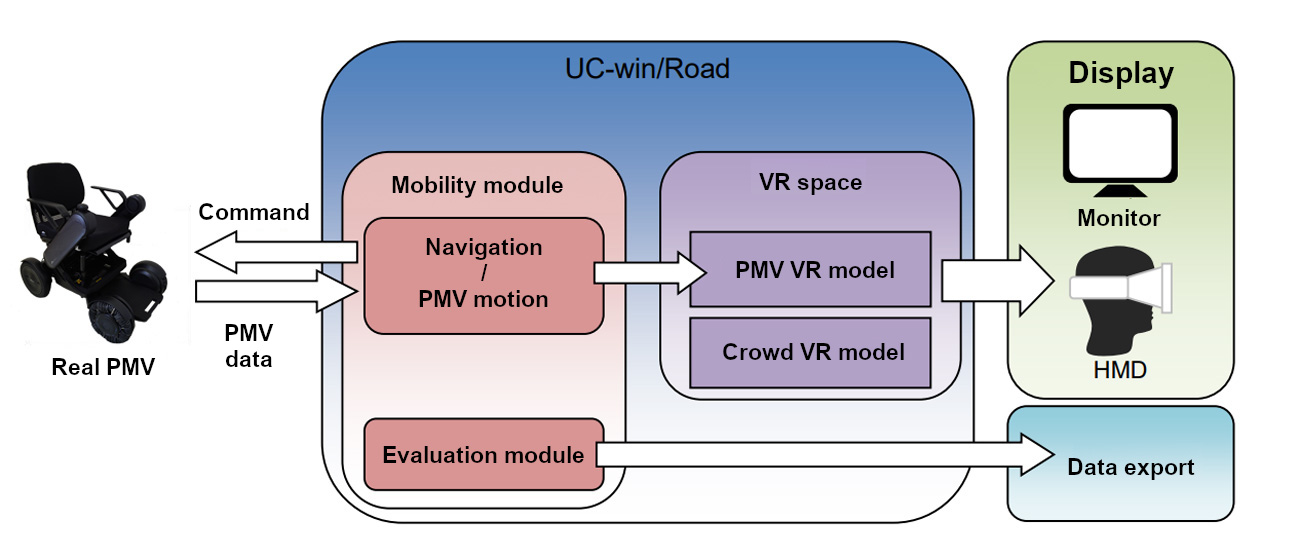
The simulator is supposed to be a real wheelchair that does not move and a viewer sits down on it and moves in the VR environment through the monitor or Head Mounted Display (HMD). To complete this system, we will develop an evaluation module for driving skills of PMS drivers. The overview of the whole system is in the figure 4.
|
|||||||||||



| (Up&Coming '21 Spring issue) |
|
|

