| New Products & Service | 模擬 | ||
發佈2022年2月 |
|||
|
|
|||
支持 ASAM OpenDRIVE
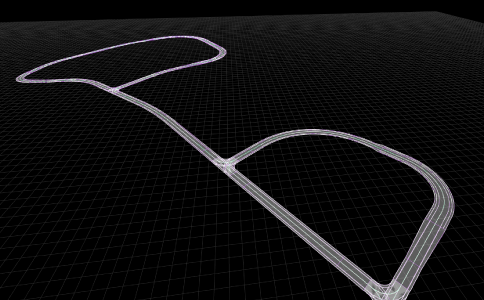
在UC-win/Road 16.0中提供對ASAM OpenDrive®文件的導入和導出功能。
OpenDRIVE®是透過ASAM(Association for Standardization ofAutomation and Measuring Systems)推進高級自動駕駛的高精度道路網絡的國際規格標準。
存儲在 OpenDRIVE®文件中的數據為道路、車道以及交通標識等道路構成物的幾何資訊,也可記述信號燈等道路沿線的特徵。
OpenDRIVE®的目的是向對ADAS及AD功能進行開發驗證的模擬提供可使用的道路網絡,透過使用OpenDRIVE®能夠實現不同模擬器間道路網絡的交換,減少製作及更換道路網絡文件的成本。
在UC-win/Road 16.0中可透過OpenDRIVE®與外部軟件進行道路網絡(道路、車道)的交換,以削減模擬成本。
透過將外部軟件製作的道路網絡使用OpenDRIVE®導入,可在UC-win/Road上進行駕駛模擬。此外,透過OpenDRIVE®導出的UC-win/Road中的道路網絡也可運用在外部軟件中進行模擬。
近年來,高精度地圖在ADAS和AD功能開發驗證中的應用已成為必不可少的一環。今後為了進一步利用UC-win/Road進行這些開發驗證,我們計劃加強OpenDRive®的數據輸出功能以及進一步進行模擬的開發。
 |
 |
 |
 |
| 圖 1 OpenDRIVE®viewer(左),導入UC-win/Road的結果(右) | |
擴展駕駛模擬的集群聯動功能
在與自動駕駛、ADAS 和交通安全有關的研究與開發中需要對模擬對象車輛和自行車周圍的車輛、行人和交通狀況進行模擬,但很難透過模擬來重現難以模擬的人類特定行為、意外反應和精細運動。因此,我們以前一直提供多用戶群集功能作為UC-win/Road的可選功能。之前,我們提供了對主要車輛製作腳本以實現其他用戶對周邊車輛、自行車、步行者進行控制的集群聯動功能。
現在可以對參加模擬的全部用戶進行單獨腳本的控制。此外,為了確保整個模擬的完整性,環境模擬對所有用戶都是通用的,對各用戶發生事件的時機、顯示的資訊(聲音、HUD內容等)進行單獨的控制。
應用示例包括:
- 在多個駕駛員在同一環境中行駛、干擾和交互的情況下,可以構建模擬,以單獨控制向每個駕駛員提供的說明、警告等。
- 在考慮緊急車輛與其他車輛的交互時,您可以創建一個方案,使交通情況相同,同時為每個乘客運行單獨的方案,其中不同的事件發生。
- 在工程機械和重型設備仿真中,可以根據每個駕駛員的情況顯示資訊,並根據協作結果為場景創建事件。
 |
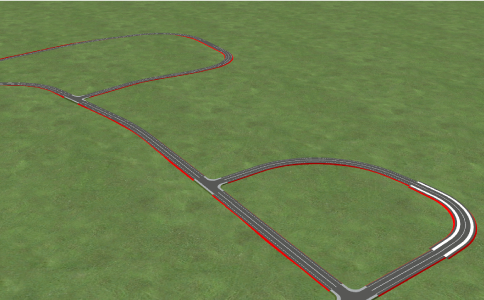
| 圖 2 駕駛員1畫面(左),駕駛員2畫面(右) |
基本功能的優化
• 鍵盤操作自定義設置
您可以自由設置鍵盤上的對應按鍵,以便在主屏幕上進行視點、跑步、飛行、行走等移動操作。您還可以刪除不使用的命令的對應鍵位並禁用該命令。
• 天氣模擬的連續變化
在打開和關閉雨、雪、風和霧的天氣表示形式和參數更改時,我們進行了改進,以漸變為設置的值。您也可以像以前一樣立即進行更改,並設置更改所需的時間。
在演示中,天氣變化流暢且精美,可提升項目的整體印象。此外,作為模擬功能,可以更逼真地表現雨量逐漸增強以及濃霧的效果。
• 改進的渲染
改進了環境映射對交通車輛的反射,以及夜間場景中半透明多邊形的照明反射,從而實現繪製更逼真的場景。
| (Up&Coming '22 新年刊) |
|
|

