| New Products & Service | シミュレーション | |||||||||||||
●新規価格Ultimate:1,892,000円(税抜1,720,000円) ●リリース2022年2月 |
||||||||||||||
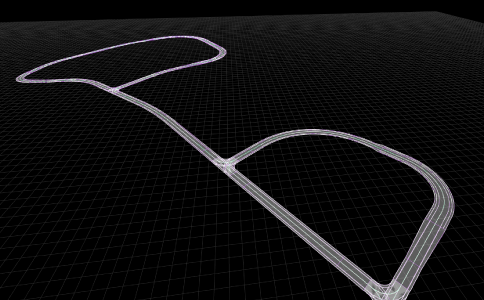
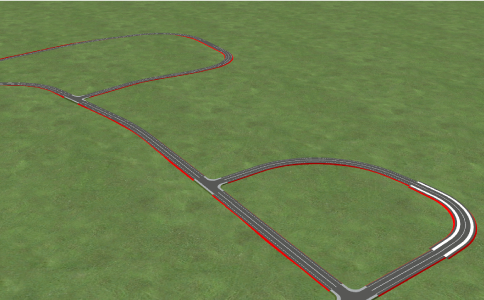
ASAM OpenDRIVE対応 UC-win/Road 16.0ではASAM OpenDRIVE®ファイルのインポートとエクスポート機能を提供します。 OpenDRIVE®は、ASAM (Association for Standardization ofAutomation and Measuring Systems) によって推進さている高度自動運転のための高精度な道路ネットワークの国際標準規格です。 OpenDRIVE®ファイルに保存されるデータは、道路、車線、および道路標識などの道路上のオブジェクトのジオメトリで、信号等道路に沿ったフィーチャーも記述できます。 OpenDRIVE®の目的は、ADASおよびAD機能を開発検証するためのシミュレーションに利用可能な道路ネットワークを提供することであり、OpenDRIVE®を使用することで、異なるシミュレータ間での道路ネットワークの交換が可能になり、道路ネットワークファイルの作成や変換コストを削減できます。 UC-win/Road 16.0では、OpenDRIVE®を介して外部ソフトと道路ネットワーク (道路、車線) を交換可能とすることで、シミュレーションに掛かるコスト削減を目的とします。 外部ソフトで作成した道路ネットワークをOpenDRIVE®にてインポートすることで、UC-win/Road上での運転シミュレーションが可能です。また、UC-win/RoadからOpenDRIVE®にエクスポートした道路ネットワークを外部ソフトでのシミュレーションに利用することができます。 近年のADASおよびAD機能の開発検証における高精度地図の活用は必要不可欠となっています。今後これらの開発検証にUC-win/Roadをさらに活用できるよう、OpenDRIVE®のデータ出力強化やシミュレーション開発を進めていく方針です。
運転シミュレーションのクラスター連動機能拡張 自動運転、ADASや交通安全に関する研究開発では、シミュレーション車両や自転車の周辺車両、歩行者、交通状況のシミュレーションが必要ですが、シミュレーションが難しい人間の特有行動や意外な反応及び細かな動きをシミュレーションで再現するのは困難です。このため、以前からマルチユーザーのクラスター機能をUC-win/Roadのオプション機能として提供しています。これまでは、主とする車両に対してシナリオを作成し、周辺車両、自転車、歩行者を他のユーザーが制御できるようなクラスター連動機能を提供していました。 今回シミュレーションに参加する全ユーザーに対して、個別のシナリオ制御をすることが可能になります。また、全体のシミュレーションの整合性を担保するために、環境のシミュレーションを全ユーザーに対して共通とし、各ユーザーに対して発生するイベントのタイミング、表示する情報 (音声、HUDの中身等) を個別に制御します。 以下のような適用例が考えられます。
基本機能の改良 ●キーボード操作のカスタマイズ設定 メイン画面での視点操作、走行、飛行、歩行等の各移動操作に使用するキーボードのキーを自由に設定できるようになります。また、使用しないコマンドのキー割り当てを削除し、コマンドを無効にすることも可能になります。 ●気象シミュレーションの連続的な変化 雨、雪、風、霧の各気象表現のON/OFF切り替え及びパラメータ変更を行う際、設定した値に徐々に変化する様に改良いたしました。これまでと同様に即座に変更することも可能で、変化に掛かる時間を設定することが可能です。 ●レンダリングの改良 交通車両への環境マップの反射や、夜間シーンでの半透明ポリゴンへの照明反射の改良を行い、よりリアルなシーンの描画が可能になります。 |
||||||||||||||



| (Up&Coming '22 新年号掲載) |
|
|

