| New Products & Service | Simulation | ||||||||
●PriceUSD3,000 ●To be releasedin March 2022 |
|||||||||
|
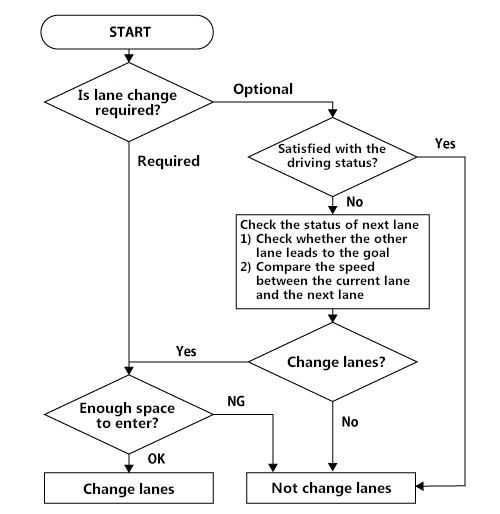
Overview In the traffic simulation of UC-win/Road, vehicles merging from the edge of the road or placed at the intersection basically go downstream road based on the branching ratio set to each carriage lane at intersection and Transition section where the number of lanes changes. At this time, the behaviors to change the lane to avoid the crowded lane have not been reproduced. The following functions will be added to simulate this situation. Overview of Models to Change Lanes There are 2 types for the lane change: a required lane change and an optional lane change. The required lane change means a lane change necessary to get to the goal. For example, if the vehicle has to turn right to reach the goal, it moves to the right-turn-only lane. The optional lane change means a driving operation which a vehicle changes the lane to drive faster when the vehicle speed on the current lane is slow. The vehicles change lanes after judging whether the lane change is required or optional.
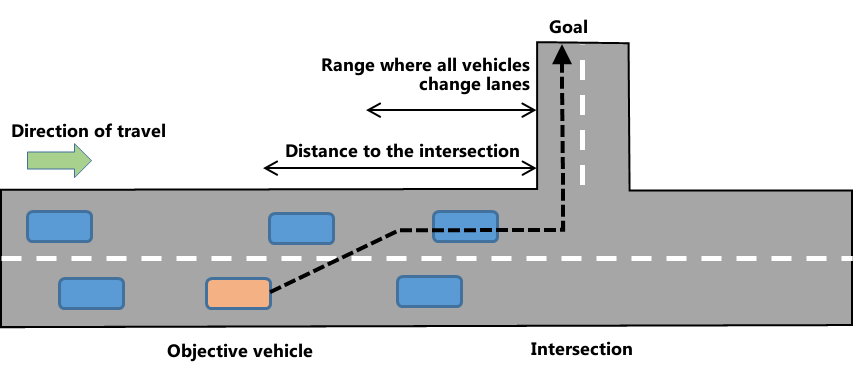
Determine Whether the Lane Change is Required or Optional As each vehicle approaches intersections where it need turn to go to the goal, the proportion of the required lane change becomes high, and all vehicles change lanes within the range of the required lane change.
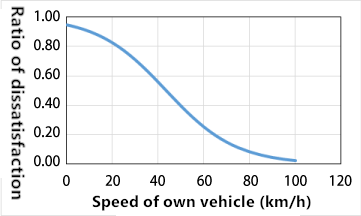
Optional Lane Change When vehicles change lanes arbitrarily, it compares its driving speed and each vehicles' desired speed to determine the satisfaction of driving status. Since large vehicles have more difficulty to change lanes than small vehicles, the determination of satisfaction is made in consideration of the type of car. To reproduce different frequency of lane change among drivers, various parameters are set to each vehicle.
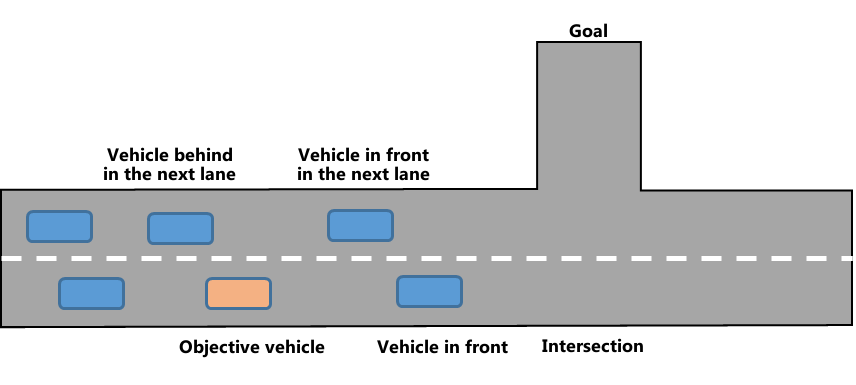
For the vehicles which are not satisfied with the driving status, the determination for lane change is performed in consideration of the speed of the vehicle itself, vehicle in front, the vehicle in the target lane, and the vehicle behind.
Check the Space to Enter Before Changing Lanes Vehicles change lanes after confirming that there is a space to enter between vehicles on the next lane. Future Development We will enhance the simulation functions such as the aggregation of simulation results, the setting for traffic amount according to time change, and the traffic amount setting using the OD traffic. |
|||||||||
| (Up&Coming '22 New Year issue) |
|
|

