| New Products & Service | CG・VR | ||
●發佈日期2022年6月3日 |
|||
|
|
|||
作為Shade3D的單獨銷售選項,我們將推出基於c++語言進行功能開發的外掛程式SDK。
支持CityGML和PLATEAU的擴展
支持CityGML格式檔讀取,該檔案格式是日本國土交通省推進的3D城市模型計畫PLATEAU所建立的城市模型,可在UC-win/Road中配置此格式的建築模型。
現有版本也可以透過FBX、OBJ格式讀取,因為新版本支援CityGML格式,所以僅UC-win/Road就可以讀取所有PLATEAU的城市模型資料。
 |
|
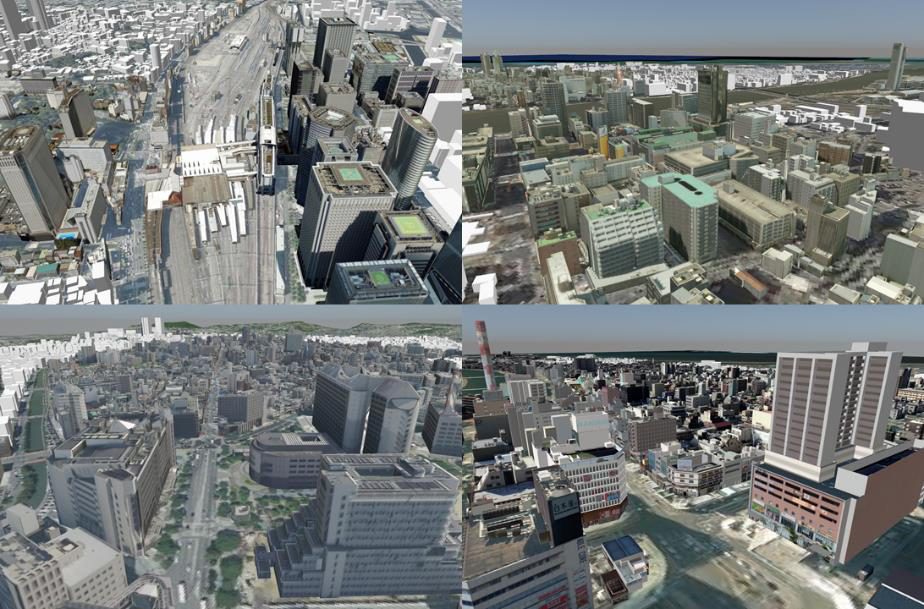
| 圖1 在日本地理院Tiles地形上疊加PLATEAU建築物資料的示例 | |
此外,還可以讀取CityGML檔中包含的建築模型的屬性資訊,現在還支援在UC-win/Road上查看PLATEAU城市模型資料中包含的屬性資訊的新功能,以前透過FBX和OBJ格式導入無法處理。
可以查看建築模型中包含的各種基本資訊,洪水和海嘯淹沒預報的資訊。
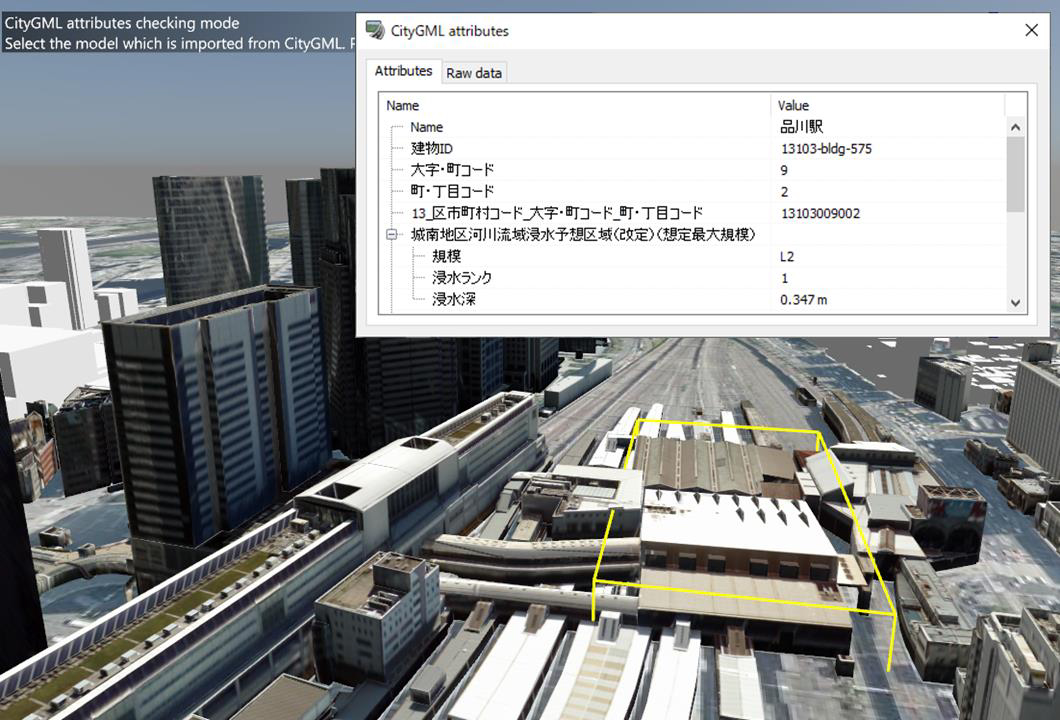 |
| 圖2 屬性資訊的閱覽 |
今後,我們將開發利用導入的CityGML的形狀和屬性資訊與各種類比連接的功能、利用屬性並以易於理解的方式顯示的視覺化功能、以及將模擬結果從UC-win/Road重新匯出到CityGML的功能,將提高UC-win/Road作為數位孿生平台的價值。
支持ASAM OpenDRIVE
OpenDRIVE®是由ASAM(Association for Standardization of Automation and Measuring Systems)推進的用於高度自動駕駛的高精度道路網路的國際標準規格。
UC-win/Road Ver.16提供ASAM OpenDRIVE®檔導入功能。透過OpenDRIVE®將用外部軟體製作的道路網路(道路、車道)導入到UC-win/Road,目的是降低製作類比環境所需的成本。近年來,在ADAS及AD功能的開發驗證中,高精度地圖的應用變得不可或缺。
今後為了能夠在這些開發驗證中進一步利用UC-win/Road,將繼續推進OpenDRIVE®的匯出功能和高精度地圖的導入功能等的開發。
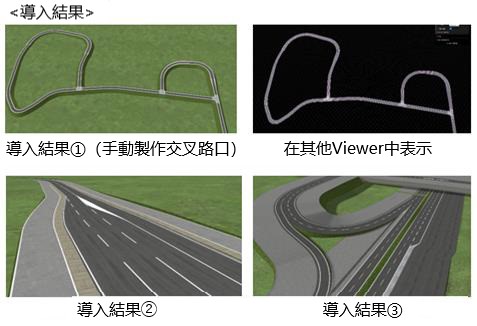 |
| 圖3 OpenDrive資料導入結果示例 |
集群多用戶功能的擴展
配合傳統的多使用者集群功能,可以根據用戶端使用者的狀態改變場景的轉移條件。另外,場景中的事件不僅可以發送給主控用戶,也可以發送給用戶端用戶。
例如,在自動駕駛、ADAS和交通安全相關的研究開發中,構築了模擬2名駕駛員和周邊車輛的集群系統時,可以透過資訊和聲音將一方駕駛員的危險駕駛等通知給另一方司機。
可以在功能區功能表的場景標籤上的多使用者編輯畫面中註冊使用者。註冊的用戶可以作為場景的轉變條件和事件的目標使用。具體分配給哪個使用者,在集群主控介面中,將使用者分配給每台機器。
其他的功能擴展
除此之外還進行了以下主要的改善和擴展。
・模型的鏡面反射(Shininess)參數允許在環境圖中進行反射。
・道路斷面的CSV輸入輸出功能:在道路斷面清單畫面中,除了RS檔之外,還可以導入、匯出CSV檔。
・擴大了道路附屬物的編輯畫面,紋理和模型資料的一次性更新和一覽顯示的排序和資料檢索變得容易。
・可以使雨、雪、風的氣象表現逐漸發生變化。
・日誌輸出功能已擴展到可以每隔一定時間輸出一次。
・可以自由自訂導航鍵盤快速鍵。
| (Up&Coming '22 夏季刊) |
|
|


loading