| New Products & Service | CG・VR | ||
●發佈日期2023年5月 |
|||
|
|
|||
UC-win/Road的下一個主要版本升級,加強了利用開放數據的能力,並增加了支援構建模擬環境的功能。 主要的修訂內容在此說明。
CityGML數據輸出功能
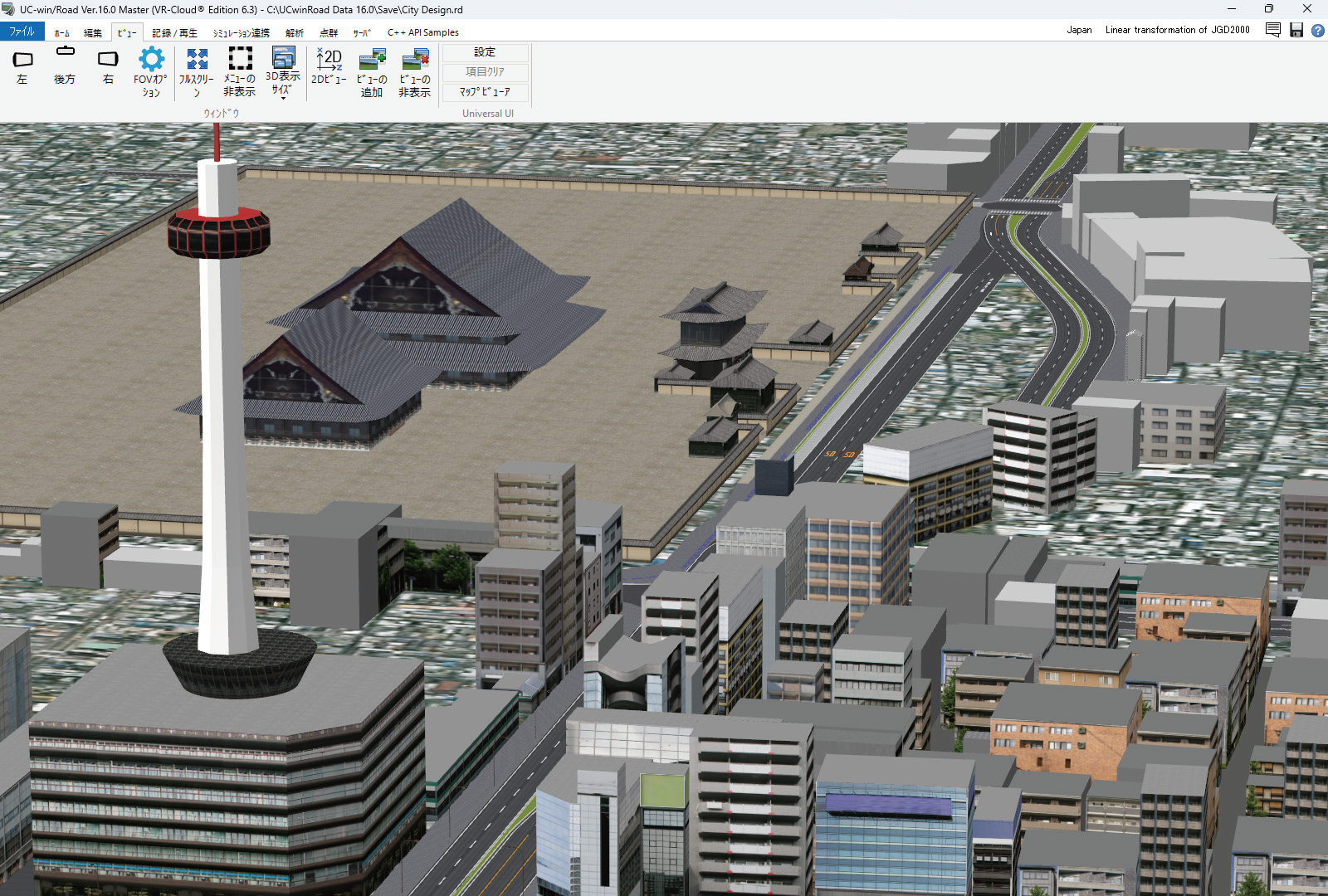
在日本國土交通省推進的PLATEAU專案中,正在建立日本城市的3D城市模型。 UC-win/Road一直致力於導入這些城市模型,Ver.15改進了導入功能,可以批量導入具有全域座標的3DS和FBX格式的模型。 Ver.16增加了直接導入城市模型的國際標準格式CityGML格式的功能,並支援導入所有公佈的城市模型數據。 UC-win/Road 17更進一步,增加了以CityGML格式輸出的功能。其目的在於將UC-win/Road作為創建和編輯城市模型以及從UC-win/Road輸出城市模型的平臺使用。
 |
|
| 圖1 UC-win/Road的城市模型數據 | |
 |
|
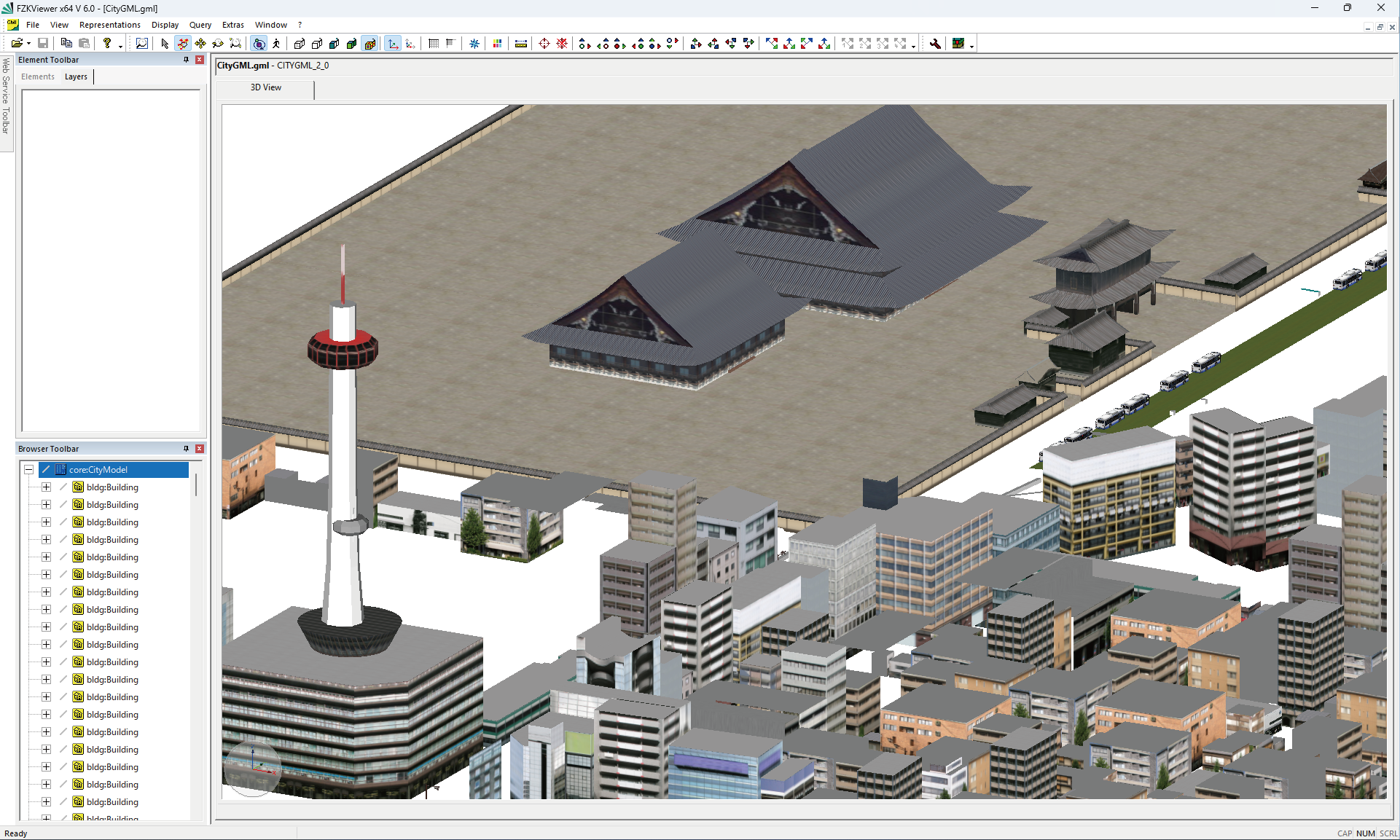
| 圖2 UC-win/Road輸出的CityGML在查看器中的顯示範例 | |
UC-win/Road的輸出將包括LOD1-2建築模型和LOD1級道路和地形模型,以便在PLATEAU三維城市建模標準操作程式的基本集合中實現輸出、 建築物的LOD1模型將是帶有擠出的建築物輪廓的無紋理模型表示,而建築物的LOD2模型將是建築物的紋理表示。 當PLATEAU的CityGML被讀入時,可以將CityGML數據與它所包含的資訊一起重新輸出,除了被改變的部分,原始資訊會被盡可能地複製和輸出。 此外,如果使用Shade3D或其他軟體將建築模型創建為實體形狀,就可以將其作為實體形狀輸出到CityGML數據。
支援浸水導航數據的導入
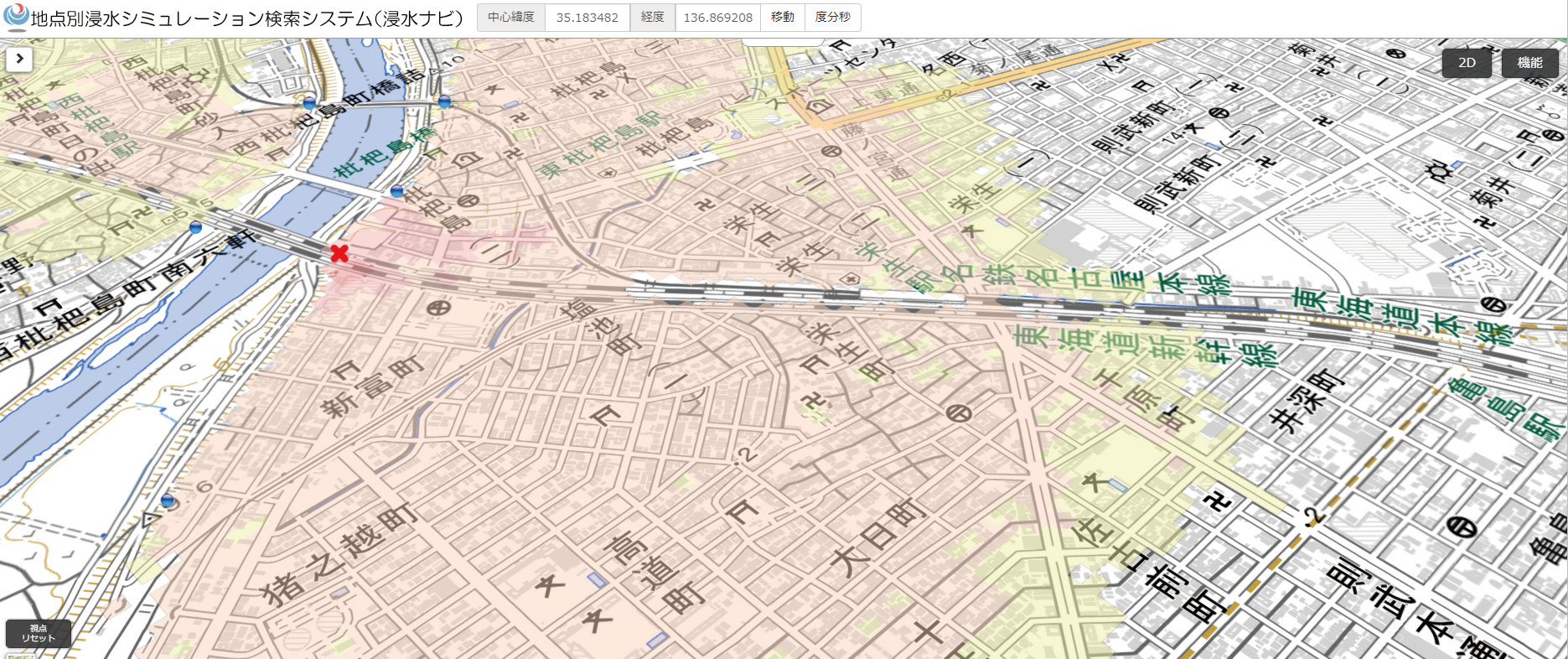
海嘯外掛程式新追加了從日本國土交通省的浸水導航中下載浸水數據的功能。 UC-win/Road上可以運用浸水導航數據進行浸水的可視化模擬。 使用UC-win/Road的區域功能,將從淹沒導航系統下載數據的區域指定為數據採集區域。 數據導入后,可使用海嘯外掛程式功能,檢查水位隨時間的變化,並將梯度可視化,形成水面的真實表現。
 |
 |
|
| 圖3 UC-win/Road 導入浸水導航數據的模擬示例(上)國土交通省 浸水導航的動畫顯示(下) | |
道路編輯功能的改良
為了提高道路建模效率追加了3個方便的功能。
1.Undo・Redo功能
以前,在平面編輯畫面上有一個撤銷功能,最多可以撤銷一次以前的操作,但現在已經改進為最多可以撤銷10次操作。 此外,以前不可能的恢復編輯操作也以同樣的方式實現了。 這個撤銷操作的數量可以在應用程式選項設置中改變。 默認設置是10次,但可以根據客戶的應用和記憶體情況適當調整。 撤銷/重做功能在平面編輯螢幕中提高了粒度,也可以在縱斷面編輯畫面、道路斷面編輯畫面和地形修補數據編輯畫面中使用。
2.能夠保存和讀取道路概況。
平面編輯介面中新增了道路線形的導出/導入和複製/貼上功能。 與線形一起保存的還有用於線形的道路橫截面和路面紋理,這樣就可以精確再現道路的幾何形狀和材料。 此外,還可以選擇並保存和導入多條道路,包括 ON 和 OFF 斜坡道路。
透過剪貼板處理複製和貼上,這對於啟動兩個或多個UC-win/Road 應用程式並整合多個專案數據的任務非常有效。 否則,導出的道路線形數據可與多個數據創建者共用,並根據需要導入,以提高數據創建效率。 道路數據會被分配一個唯一的ID,當導出的道路被導入到同一專案中時,可選擇保留或覆蓋原始道路進行合併。 此外,縱向線形編輯螢幕中還提供保存和載入功能。 該介面包括縱向線形、道路橫截面和路面紋理。
 |
3.道路的起點・終點變更功能
增加了在平面編輯螢幕中交換任何道路的起點和終點的功能。 例如,如果您創建了一條道路線形,然後發現單向方向顛倒並試圖糾正,這就非常有用。 在此之前,需要刪除該路線,然後在相反方向添加IP點。 此外,當該功能應用於道路上已創建道路附屬物、隧道和橋樑的道路時,它可以保留它們之間的位置關係。 道路附屬物、隧道路段、橋樑路段等在路線中的位置將參照原始終點進行更新,因此道路的外觀不會改變。
LKA功能
LKA 是 Lane Keeping Assist(車道保持輔助系統)的縮寫,在日語中被稱為車道偏離預防系統。 在實際車輛中,LKA識別車道的白線,當車輛偏離白線時,會發出警報聲或對方向盤施加旋轉力,試圖使車輛回到車道中央。
UC-win/Road 17實現了表示這種LKA運動的功能,使UC-win/Road能夠計算車道偏離量,並根據該偏離量和速度計算施加在方向盤上的力和方向盤修正量。 方向盤上的反作用力將反映在支援力反饋的遊戲控制器上,並與支援扭矩控制的各種駕駛模擬器硬體相容。 當車輛偏離車道時,還可以播放設定的警告聲。 如果該功能與外部系統連接,就可以實時獲取該功能的計算結果。 這可用於研究和開發與 LKA 功能相關的人機介面和道路安全。
改進速度限制功能
UC-win/Road Ver.17改進了道路的限速功能。 到目前為止,限速是在生成交通流時根據初始速度和移動控制點設定的,但現在可針對各路段設定限速,從而更容易在現實世界中體現各路段的限速設定。 設定的速度限制可以在不同的場景和 API 之間切換。 此外,還可以獲取使用中的速度限制資訊。 在各種交通狀況下進行重複實驗和數據分析也很方便。
重放影片錄像功能
重放外掛程式選項將進行擴展,包括將駕駛類比和場景運行等重放記錄轉換為視頻的功能。 可以選擇過去錄製的多個重放資料(. RR 檔)和現在錄製的數據,並一次性將它們全部轉換。 解析度、記錄視角和轉換範圍可通過選項設置進行設置。 例如,如果以俯瞰視角創建了一段視頻,記錄了在某個場景中的某個十字路口右轉的場景,則可用於直觀檢查車輛是否安全行駛,是否注意來往車輛、交通信號燈和行人。
Python API
概要
為支援UC-win/Road的模擬開發,將發佈Python API。 UC-win/Road迄今為止提供了Delphi SDK、JavaScript集成、C++ API等外部數據集成功能。 Python API是一種API,用於更簡單、更高效地與UC-win/Road進行數據集成。
對象機能
它提供與 C++ API 相同的功能,包括駕駛模擬器控制、模型即時控制、主螢幕視角控制、功能表和按鈕使用者介面控制。
COM
Python API 使用微軟的 COM; 由於 Python 有一個 COM 庫,用戶可以輕鬆地使用 Python API 程式設計,而無需瞭解 COM 程式設計。 由於它是在 COM 中開發的,因此除了 Python 之外,還可以在 C#、JavaScript、MATLAB 等語言中使用。
高效的程式設計和執行
在Delphi SDK和C++ API中,用戶創建外掛程式並將外掛程式載入到UC-win/Road中運行,而Python API允許從UC-win/Road功能區功能表、腳本螢幕和場景事件中運行Python腳本。 Python API是從UC-win/Road功能區功能表、腳本螢幕和場景事件中執行Python腳本的機制。 在對程式進行更改後可立即執行腳本,而無需重新啟動UC-win/Road。 還可從Visual Studio等外部應用程式執行腳本,並將其連結到UC-win/Road。 使用者可在熟悉的環境中進行程式設計和調試,Python還擁有其他各種有用的庫,可幫助使用者高效創建UC-win/Road集成程式。
其他對應項目
其他支持專案包括增加一項功能,支援使用點雲數據創建道路。 特別是,已對編輯螢幕上的輸入進行了改進,使其更易於參考點雲。 此外,VISSIM 連結功能將支援 VISSIM 2023。
| (Up&Coming '23 春之號發布) |
|
|

