| New Products & Service | Simulation | |||||||||||||||||
|
||||||||||||||||||
|
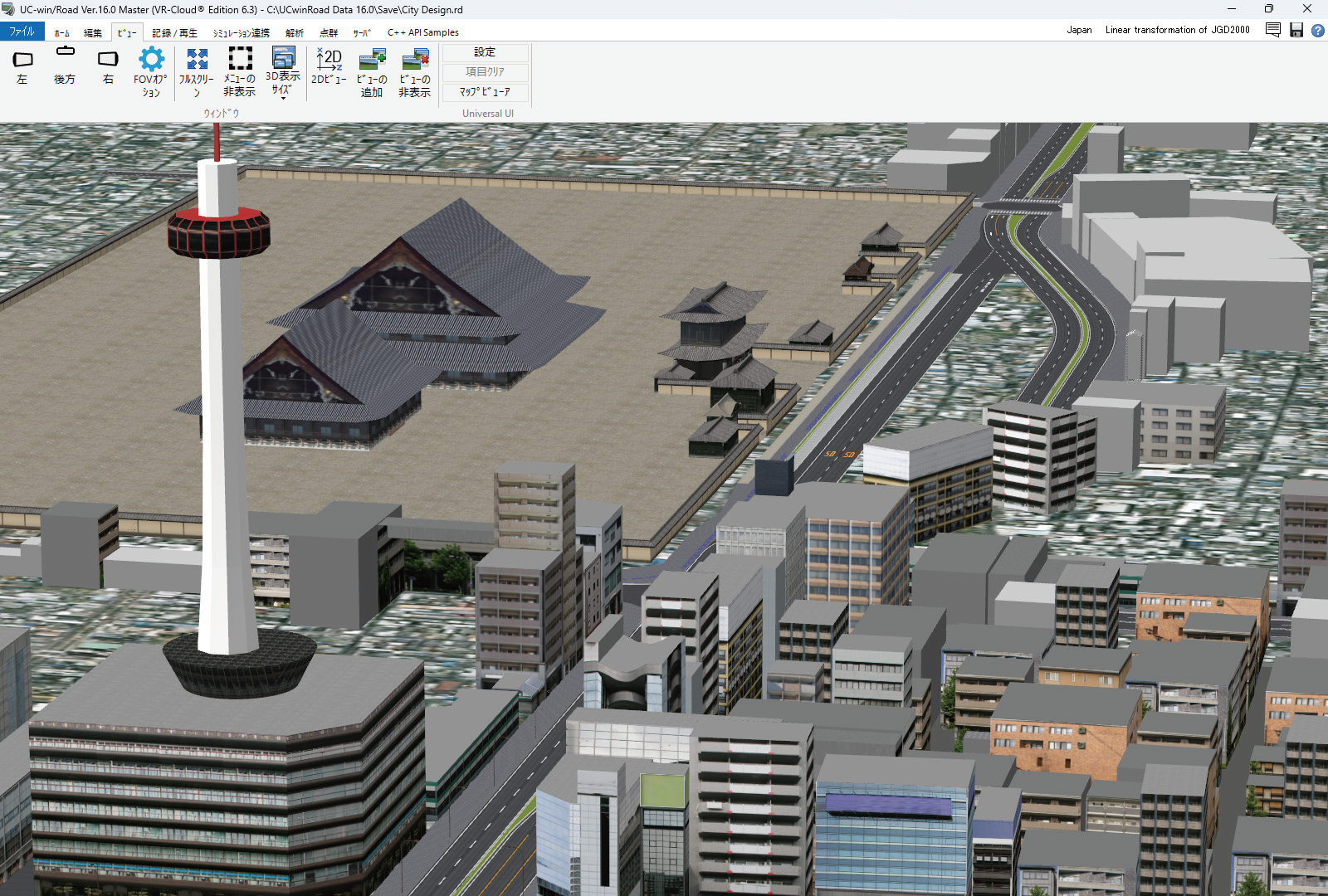
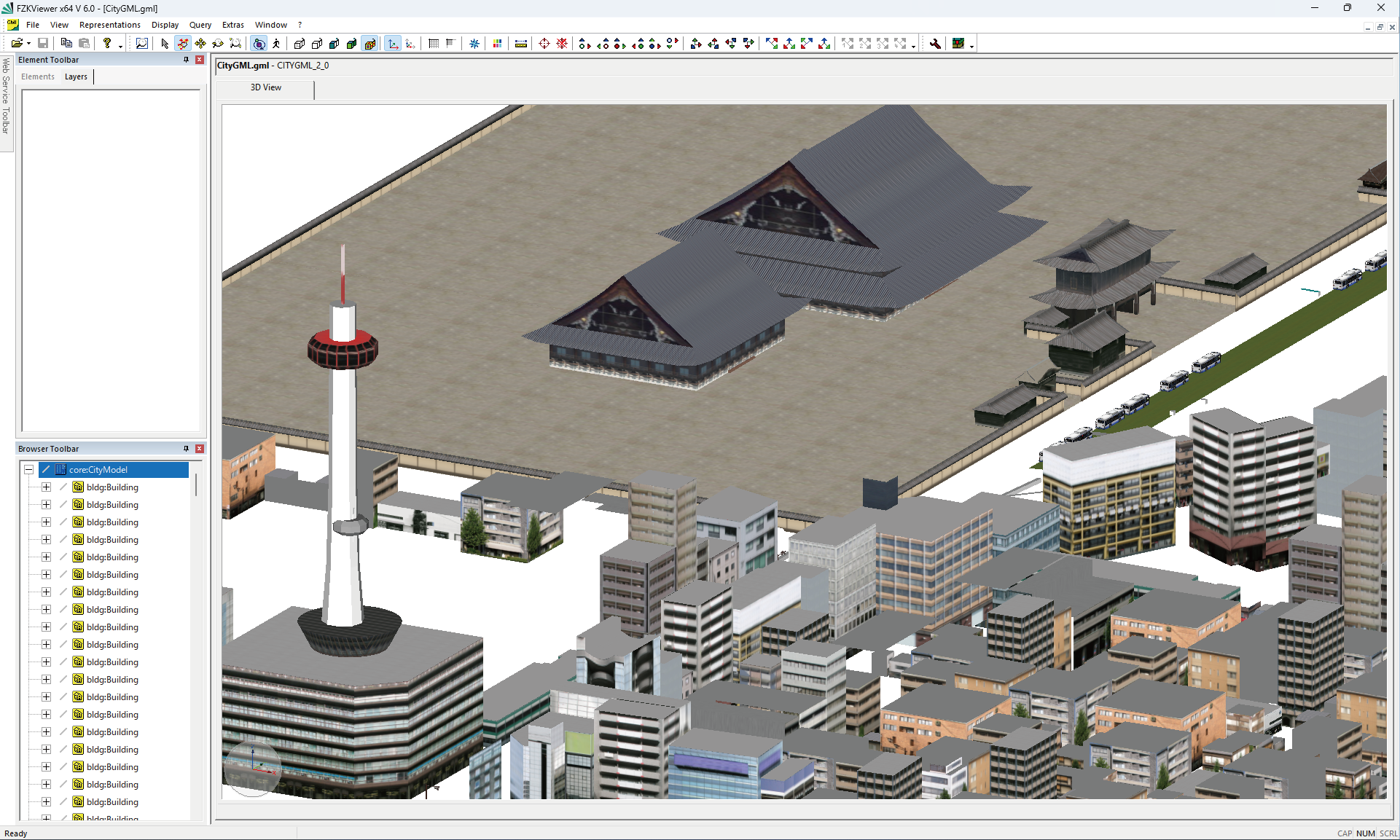
The next major version upgrade of the 3D Design Studio UC-win/Road includes the enhancement of functions for using open data and a new function for supporting the creation of simulation environments. Here are the main revised contents. CityGML Data Output The PLATEAU project of the Ministry of Land, Infrastructure, Transport and Tourism is in the process of creating 3D city models of Japanese cities. For UC-win/Road, FORUM8 has also worked on adding a function to import these city models. Ver.15 product had an improved import function for batch import and placement of 3DS and FBX models with global coordinates. And Ver.16 added the ability to directly import the CityGML format, which is the international standard format for city models, making it possible to import all published city model data became possible. UC-win/Road 17 will go even further and add the ability to output in CityGML format. This is intended for use where UC-win/Road is used as a platform to create and edit city models and output them from UC-win/Road.
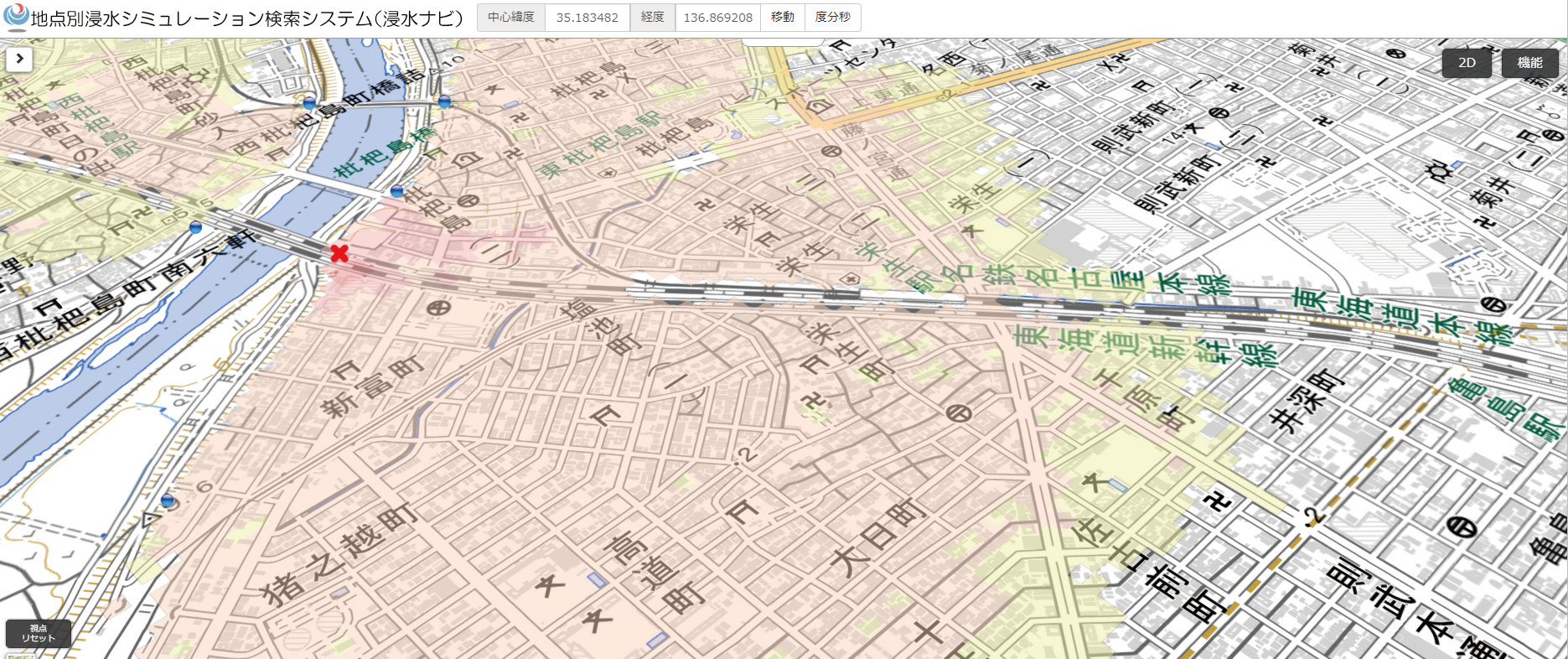
UC-win/Road will output LOD1-2 building models and LOD1 road and terrain models, etc., to enable the output of the basic set of models in PLATEAU's Standard Operating Procedures for 3D city models. LOD stands for the Level of Detail. The LOD1 building model represents an untextured model with extruded building outlines, while the LOD2 building model is a textured building representation. When PLATEAU's CityGML is loaded, the CityGML data can be re-exported with the same information as the CityGML data, so that the original information can be reproduced and output as much as possible except for the parts that have been changed. If a building model is created as a solid shape using Shade3D or other software, it can be output as a solid shape to CityGML data. Import of Flood Navi Data The Tsunami Plug-in will be equipped with a function to download inundation data from the Flood Navi system of the Ministry of Land, Infrastructure, Transport and Tourism, enabling visual simulations of inundation using the data on UC-win/Road. In the zone function of UC-win/Road, specify the area to be downloaded from the Flood Navi. Once the data has been imported, it is possible to check water level changes over time and visualize gradients to create a realistic representation of the water surface by using the Tsunami Plug-in function.
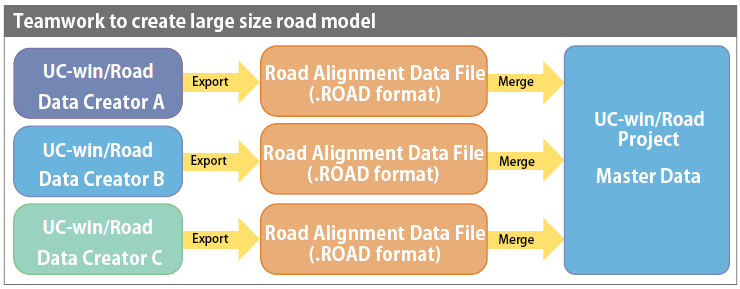
Improvement of Road Editing Three useful features will be added for more efficient road modeling.
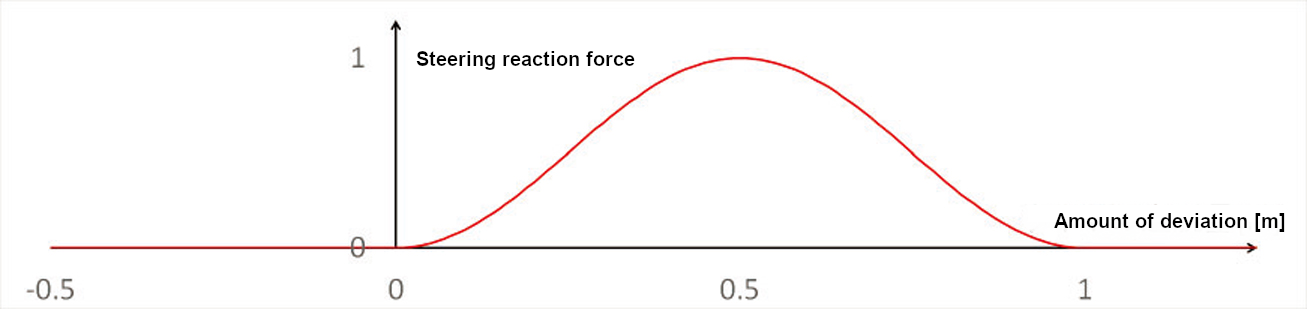
3. Change Road Start/End Point LKA LKA is short for Lane Keeping Assist. In actual vehicles, LKA detects the white line of the lane, and if the car crosses it, it sounds an alarm or applies torque to the steering wheel to bring the car back to the center of the lane. UC-win/Road Ver.17 will implement a function to represent this LKA movement. The function calculates the amount of deviation from the correct lane and computes the force applied to the steering wheel and the amount of steering wheel correction according to this deviation and speed. The reaction force on the steering wheel will be reflected in game controllers that support force feedback and will be compatible with various driving simulator hardware that supports torque control. In addition, it is possible to play a pre-set warning sound when the vehicle deviates from its lane. Assuming the linkage between this function and external systems, it can acquire the calculation results of this function in real time, enabling it to be used in the research and development of HMI and traffic safety systems linked to the LKA function.
Improvement of Speed Limit The speed limit function for roads will be improved in UC-win/Road Ver.17. Previously, speed limits were set based on the initial speed at the time of traffic flow generation and the motion control point. The improvement this time will allow actual speed limits specified to each road in real world to be reproduced in UC-win/Road. The set speed limit values can be switched between scenarios and the API. The improvement this time will allow UC-win/Road to reproduce the actual speed limits set for each real road. The set speed limit values can be switched between scenarios and the API. It is also possible to retrieve information about the speed limit in use. This facilitates repeated experiments and data analysis under various traffic conditions. Replay Video Recording The Replay Plugin Option will be enhanced to convert replay recordings such as driving simulations and scenario play to video. Not only the currently recorded data but also the previously recorded replay data (RR file) can be selected and converted all at once. The conversion option includes the settings for resolution, recording viewpoint, and conversion range. For example, by creating a video of a right-turn scene at a specific intersection from an overhead viewpoint, it can be used to visually confirm that the vehicle is traveling safely while paying attention to oncoming traffic, traffic signals, and pedestrians. Python API Overview Other Contents Other improvements include the addition of a function to support road creation using point cloud data. In particular, the input on the editing screen is improved, and the reference of point clouds becomes easier. The linkage with VISSIM will cover VISSIM 2023. |
||||||||||||||||||


| (Up&Coming '23 Spring issue) |
|
|

