| UC-win/Road Ver.6 3차원 리얼타임 VR 소프트웨어 |
|
시뮬레이션 |
|
||||||||

UC-win/Road는 3차원 버추얼 리얼리티(VR=가상 공간)을 쉬운 PC조작으로 작성・이용할 수 있는 리얼타임 VR 소프트웨어입니다. 이번에 릴리스하는 Ver.6에선 다음과 같은 기능 추가・개선을 했습니다.
| New Products | ||||||||||
|
||||||||||
|
||||||||||
UC-win/Road는 3차원 버추얼 리얼리티(VR=가상 공간)을 쉬운 PC조작으로 작성・이용할 수 있는 리얼타임 VR 소프트웨어입니다. 이번에 릴리스하는 Ver.6에선 다음과 같은 기능 추가・개선을 했습니다. |
||||||||||
| 보행자 군집 이동 |
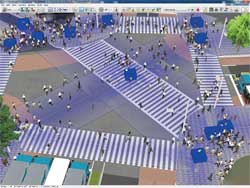
| 이번 개정에서 3차원 공간상에 폭을 갖춘 비행 루트(패스웨이)를 배치해 그 위르 많은 보행자를 걷게 하는 기능 (군집 이동)을
추가했습니다. (그림1)。원래 보행자는 설정된 비행 루트의 정해진 라인 위를 걷는 것이었지만 이번에 리얼리티가 향상된 뿐만 아니라
많은 보행자 배치에 필요한 시간이 크기 경감했습니다. 이 기능으로 한꺼번에 많은 보행자를 배치해서 보다 인간의 거동에 가까운 움직임을 시뮤레이터할 수가 있습니다. 그리고 보행자는 스스로 충돌을 회피하면서 걷는 것도 가능합니다. 패스웨이끼리를 접속시킨 네트워크 구칙도 가능하며 네트워크 내 보행자는 스스로 진로를 결정해서 걷습니다.
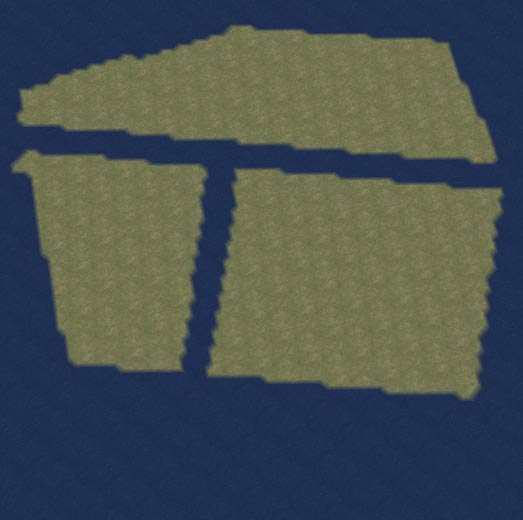
(1)패스웨이란? 패스웨이란 폭을 갖춘 비행 루트를 말하며 그 위를 보행자가 임의로 걷습니다. 기점 ・종점 노드(그림2 파란 사각형)과 중간 각 변화점(그림2 노란 동그람)으로 구성되어 있으며 기울일 수도 있습니다. (2)패스웨이 설정 방법 기존의 비행 루트와는 달리 메인 화면의 3차원 공간상에서 직접 작성하기 위해 패스 위치 관계를 쉽게 파악할 수 있을 뿐만 아니라 아주 자세한 높이 조정 등을 인터랙티브하게 할 수가 있습니다.
(3)보행자 배치 방법 보행자 배치엔 2가지 방법이 있습니다. 시뮬레이션 시작 직후 미리 설정한 인원수 만큼 램덤한 위치에 생성하는 방법과 지정한 노드에서 일정한 시간 각격으로 생성하는 방법입니다. 군집 대상으로 되는 MD3/FBX 모델은 등록 모델에서 램덤하게 선택됩니다. (4)보행 알고니즘 보행자는 다른 보행자와 접촉하지 않도록 회피하면서 걷습니다. (그림3)。구체적으로는 시야 및 시야각, 위치 마찰, 속도 벡터 등의 파라미터를 고려해 미소한 시간 단계마다 시야에 들어오는 보행자를 인식합니다. 다른 보행자가 인식되었을 경우 필요에 따라 진행 방향을 바꿔 가면서 보행합니다. 그리고 같은 빈행 방향 보행자를 인식했을 경우 그 보행자에 추종하는 요소를 넣습니다. 그것으로 인해 군집으로서의 사람 흐름이 원활하게 실행됩니다.
(5)향후의 예정 앞으로 교통과의 통합을 해 교통 신호가 바뀔때까지 횡단 보도 앞에서 대기, 목적지까지 가는 루트 탐색, 빙딩 등의 장애물 회피 기능 탑재를 할 예정입니다. |
| FBX 모델의 애니메이션 기능 |
| UC-win/Road는 Ver.5부터 FBX형식 3D모델 서포트를 진행해 왔습니다. 현행 FBX은 정적 모델(애니메이션 없음)으로서
서포트하고 있습니다만 Ver.에선 이것을 확장해서 애니메이션 기능을 추가했습니다. (1)FBX 애니메이션에 대해 이번에 대응한 FBX 애니메이션은 bone 애니메이션이라고 하는 것입니다. (그림4) bone(뼈대)는 3D 모델 가동 영역을 담당하는 것이며 각 접합 부분은 "관절"역할을 합니다. 그렇기 때문에 뼈 수가 많을 수록 가동 영역이 많아지고 복잡해서 자연스러운 동작을 표현할 수 있습니다. 그리고 애니메이션 계산은 모두 shader로 하고 있어서 다수의 애니메이션을 높은 FPS로 재생할 수가 있습니다. 그리고 MD3 캘릭터 모델과 동일하게 카메라에서 멀리 작게 표시되는 모델 표시 정밀도를 낮워서 퍼포먼스를 유지하는 LOD(level of detail) 기능을 탑재했습니다.
(2)캘릭터를 등록 FBX 애니메이션에 대응하면서 캘릭터로서 FBX 모델 등록이 가능하게 되었습니다. 등록은 기존의 「MD3 캘릭터 등록」화면을 확장한 「캘릭터 모델 등록」화면에서 실시합니다. 이 화면에서는 편집, 삭제, RoadDB에서 다운로드, 이동체 추가같은 조작이 가능하며 편집을 선택하면 FBX 씬 편집 화면이 열려서 애니메이션 실행 속도와 규모 등이 설정할 수 있습니다. (그림5)。
(3)시나리오 기능에서의 이용 FBX 모델은 시나리오 기능에서도 사용할 수가 있습니다. 시나리오 이벤트 편집 화면과 타겟 모델 편집 화면에서 등록한 FBX 캘릭터 모델을 선택할 수가 있습니다. (4)향후의 개발 예정 현시점에서는 다른 어플리케이션으로 FBX 애니메이션 동작 설정을 할 필요가 있지만 향후 개정에서 UC-win/Road 내에서 설정할 수 있도록 확장해 나갈 예정입니다. 그리고 애니메이션이 설정되지 않는 매쉬를 임의의 뼈와 결합하는 기능도 개발 예정입니다. 매쉬 결합 기능을 탑재하면 다양한 움직임을 뼈로서 일종의 라이브러리로 함으로써 애니케이션 설정이 쉽게 할 수 있도록 됩니다. (5)향후의 예정 향후의 개정에서는 교통과의 통합을 실행해서 교통 신호가 바뀔 때까지 횡단 보도 앞에서 대기, 목적지까지의 루트 검색, 빌딩 등 |
||||||||||||||||||||
| RoadDataViewer 플러그인 |
| 프로젝트 내의 오브젝트(빌딩, 수목 등)이나 텍스처, 교타점 등의 정보를 트리 형식으로 일람 표시를 할 수가 있습니다. 트리는
메인 화면에 도킹할 수가 있습니다. 그리고 트리에 표시된 오브젝트를 선택하면 오브젝트에 시점 이동이 가능합니다. 오브젝트 명칭
변경, 삭제, 오브젝트명으로 자세하게 검색할 수도 있습니다. 그리고 이 플러그인에서는 다음과 같은 검증 기능을 준비하고 있어 작성한 데이터 정합성을 확인할 수도 있습니다.
|
| IFC 플러그인 |
| IFC(Industry Foundation Classes) 데이터 모델은 건설 업계의 상호 운용성을 촉진하는 목적으로 IAI로
인해 개발된 국제 표준 규격입니다. (현재 이 모델 사양은 buildingSMART International이 개발, 유지하고
있습니다. )。 이 플러그인에서는 IFC 포맷으로 기술된 파일 안에 있는 지형 데이터를 UC-win/Road에 지형 패치로서 임포트할 수가 있습니다. 그리고 UC-win/Road의 지형 및 빌딩 등의 3D 모델을 IFC 포맷으로 익스포트할 수가 있습니다. 그림7에 UC-win/Road에서 익스포트한 IFC 파일을 시장에서 판매하는 소프트웨어로 임포트한 화면을 나타냅니다. 왼 쪽이 UC-win/Road, 오른 쪽이 시장 판매하는 소프트웨어 화면입니다.
|
||||||
| 12d Model 플러그인 |
| 12d Model은 호주 12d Solutions사의 지형 모델링, 측량, 토목 설계 통합 솔류션입니다. 도로, 설계 현장 레이아웃,
분양지, 환경 영향 조사 등 폭넓은 프로젝트에 사용되고 있습니다. 이 플러그인에서는 12d Solutions사가 규정한 「12d Ascii File」포맷을 사용함으로써 UC-win/Road와 12d Mode 쌍방향 데이터 연계를 실현합니다. 연계 가능한 데이터는 표1과 같습니다.
12d Ascii File를 UC-win/Road에 임포트할 경우 임포트할 지형 (Tin 데이터)와 도로 선형을 선택해서 도로 횡단면 템플릿과 같이 변환을 실행합니다. 템플릿이란 12d Model 단면 데이터를 UC-win/Road에 불러오기 위한 단면 속성의 매핑 정보를 갖는 데이터를 말합니다. 적절하게 임포트되면 그림8처럼 읽어듭니다. 그리고 UC-win/Road에서 익스포트할 경우엔 오브젝트(지형, 지형 패치, 도로 선형)을 선택해서 파일명을 지정합니다.
|
||||||||||||||||||||||||||
| 해일 해석 소프트웨어와의 연계 |
| xpswmm 플러그인은 범람 해석 소프트웨어 xpswmm 해석 결과를 UC-win/Road상에서 가시화하기 위한 플러그인입니다.
이번 개정에서는 해일 해석 결과를 표현함으로써 보다 리얼한 것으로 되었습니다. (1)표현력 향상 수면 반사와 굴절로 인한 묘화를 선택 가능하게 하고 다음과 같은 기능을 탑재했습니다.
수면은 사소한 잔물결뿐만 아니라 하늘과 태양, 달 등을 비치게 표현되어 있습니다. 이것으로 인해 보다 현실감이 넘치는 높은 표현이 가능하게 되었습니다. 그리고 수면에 반사, 굴절 정도는 Fresnel equations로 계산합니다. 그래서 그림11 왼쪽처럼 수면에 대한 시선 각도가 얕으면 반사(하늘 등의 이동)이 많으며 오히려 시선이 깊으면 굴절이 많아져서 물 깊이 색깔이 짙어집니다.
(2)해일로 인한 건물 파괴도를 표현 이번 개정에서는 해일로 인해 건물에 부담되는 항력을 계산해서 건물 차괴 정도를 가시화하는 기능 탑재를 하고 있습니다. 구체적으로는 해일 항력과 건물마다 설정된 에너지 수습력의 파라미터에서 건물 파괴도를 계산해서 차괴도에 따라 표2처럼 색깔을 바꿔서 표현합니다. 그리고 해일로 인한 손해는 물 높이로 계산하는 것이 일반적이지만 이 기능에서는 xpswmm 데이터에서 취득한 물 깊이, 유소그 건물 형상으로 이내 계산한 수력과 수력에서 구할 수 있는 항력을 사용해서 계산을 하기 때문에 보다 정확한 분석을 가능하게 합니다. 그리고 파괴 정도 색깔에서 평면적인 분포를 콘투어로 나타낸 해저맵을 출력하는 기능 개발도 검토하고 있습니다.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 5m 매쉬 서포트 |
| 국토 지리원 발행 수치 지도 5m 매쉬 (표고)데이터에 대응했습니다. 5m 매쉬 데이터를 지형 패치로서 UC-win/Road에
읽어드는 것이 가능합니다. 읽어드는 방법은 다음과 같습니다. (1) 파일 직접 선택 제품 메뉴「File」-「Load Terrain Patch」-「Lem file」에서 5m 매쉬 Lem 파일을 직접 선택합니다. 선택 후 선택된 Lem의 표고 데이터를 사용해서 지형 패치 데이터를 작성합니다. (2)매쉬 선택 일본 지형 선택화면에서 「5m」 속도 버튼을 클릭해서 Lem 파일을 선택합니다. 50m 매쉬를 선택할 때 Lem이 포함되어 있을 경우 별도 5m 매쉬 화면이 나타납니다. (그림12)。 이 화면에서 실제로 읽어드는 영역을 마우스로 선택해서 평소와 같이 지형을 생성하면 평소 지형 위에 5m 매쉬 지형 패치가 생성됩니다. (그림13)。
|
||||||||||
| 주차장 모델을 읽어드는 플러그인 |
| 주차장 규격에 근거한 주차장 설계를 지원하는 당사 CAD 시스템「UC-1 주차장 작도 시스템」에서 작성한 주차장 도면 데이터를
임포트하는 플러그인입니다. 외주 주차 매스, 내부 주차 매스, 노상 표식 (진행 방향 마크 등)을 CAD 도면에 따라 정확하게 묘화할 수가 있습니다. (그림14) 그리고 임포트된 도면 데이터는 빌딩, 차와 동일한 모델로서 취급되기 때문에 임의의 위치에 배치하거나 전체를 회전시킬 수가 있습니다.
|
| 연기를 개선 |
| 터널내 연기 표현을 개선해 터널 외에서도 현실감 넘치는 연기, 불 표현을 할 수 있게 되었습니다. |
| 카메라 뷰 |
| 기존 버전에서는 VR 공간에 고정 카메라를 설정해서 임의의 카메라 뷰 윈도우를 추가해 경관을 확인할 수 있었지만 이번엔 이것을
확장해서 인터랙티브한 카메라를 배치할 수 있게 되었습니다. 예를 들어 카메라가 운전 차량에 추종하도록 설정하면 임의의 각도에서
주행하는 차량을 쫓아오는 카메라를 정의할 수 있습니다. |
| 특수 기상 기능 |
| 이번 개정에서는 우천시 표현력 향상으로서 다음과 같은 2가지 확장을 실시했습니다. (1)앞차 물보라 표현을 추가 운전 시뮬레이션을 할 때 그림15처럼 앞차 바퀴의 물보라 상태를 표현할 수 있게 되었습니다. 묘화 옵션 화면에서 「우천시 물보라」를 체크합니다.
(2)와이퍼 표현 묘화 옵션 화면에서 표3 파라미터를 선택해서 와이퍼 속도를 선택할 수 있게 되었습니다. 그리고 플런트 유리의 묻은 비와 기상 기능을 사용하지 않아도 와이퍼를 단독으로 표시할 수 있게 되었습니다. (그림16)
|
| 콘트롤러 진동 기능을 추가 |
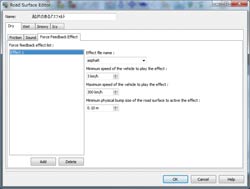
| 핸들형 콘트롤러와 게임 패드를 사용한 운전 시뮬레이션일 때 아스팔트와 사리도 등에서 전해오는 사소한 진동과 차도 등을 넘을 경우의
진동을 콘트롤러에 전할 수 있게 되었습니다. 이것으로 인해 보다 리얼한 운전 감각을 재현할 수 있게 됩니다. (1)Force Feed Back 기능 그림17 도로면의 설정 화면에서 「Dry」「Wet」「Snowy」「Icy」각 상태에 대해 진동 데이터 파일을 할당하거나 진동 효과 설정을 할 수가 있습니다. 설정한 도로면을 텍스처에 할당해서 그 텍스처를 사용한 노면을 주행하면 콘트롤러에 진동을 전할 수 있게 됩니다. (2)뱀프 기능 지정한 도로의 임의의 위치에 도로 뱀프를 설정해서 운전하는 차량이 뱀프 위를 통과할 때 콘트롤러를 진동시킬 수가 있습니다. 그림18처럼 선로 레일 상에 설정하면 레일 위에서 콘트롤러가 진동됩니다. 그리고 도로의 궤도와 차도와 보도 연결되는 부분 등에 설정하면 보다 현실감이 증가됩니다.
|
| 차량에 대한 개선 |
| (1)슬립음 아스팔트 상에 있는 차량이 급 가속, 급 브레이크, 급 선회할 때 스킬음을 발생시킬 수 있게 되었습니다. 바퀴 역학을 고려한 설정을 함으로써 차속과 차중을 고려한 관성력, 바퀴 글립, 도로면의 마찰 계수 등을 계산해서 바퀴 슬립이 커지면 스킬음이 발생합니다. (2)키보드를 사용한 운전 시뮬레이션 원래 운전 시뮬레이션을 할 때엔 핸들형 콘트롤러와 게임패드가 필요했지만 이번에 개정되면서 키보드를 사용한 운전 시뮬레이션에 대응했습니다. 이것으로 인해 콘트롤러가 없는 환경에 있어서도 운전 시뮬레이션을 할 수 있습니다. |
| 옵션・플러그인을 개정 |
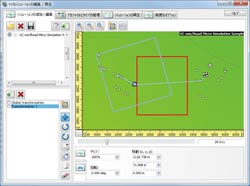
| POV-Ray 플러그인 AVI플러그인과 POV-Ray 플러그인을 통합해서 AVI 플레임 단위로 POV-Ray 스크립트를 자동 출력함으로써 보다 고정밀도한 동영상을 제작할 수 있게 되었습니다. 지금까지의 AVI 파일은 물론, 각 플레임 이미지를 출력합니다. 플레임 단위의 POV-Ray 스크립트를 렌더링하면서 결과를 이어 맞춤으로써 고정밀도한 동영상을 제작하는 것이 가능합니다. 이 고정밀도한 동영상 작성을 포럼에이트에선 CG 동영상 서비스로서 실시하고 있습니다. 이 서비스에서는 렌더링을 효고현 고베시에 있는 슈퍼컴퓨터 「FOCUS」를 사용해서 하기 때문에 대규모 데이터라도 보다 빠르게 결과를 얻을 수 있게 됩니다. POV-Ray 스크립트는 플레임 단위로 출력하지만 사전에 정지 데이터를 출력해서 플레임 출력시에는 그 정지 데이터의 인스턴스 데이터를 출력하게 되어 있기 때문에 비교적으로 빨리 출력이 가능합니다. 시나리오 시나리오 실행시 모든 모델과의 접좃 판정을 할 수 있게 되었습니다. 그리고 운전을 시작할 때 카메라 설정을 할 수 있게 되며 임의의 위치에서 상태 (씬)을 확인할 수 있게 되었습니다. 마이크로시뮬레이션 플레이어 기존의 마이크로시뮬레이션 플레이어에서도 시뮬레이션 대상이 되는 오브젝트 전체 이동과 회전, 규모 변경을 할 수는 있었지만 이번 개정에서는 지정한 범위에 대해 독립해서 이동과 회전 같은 조작을 할 수 있게 되었습니다. 이 범위는 존이라고 불러 마우스에서 드러그해서 정의가 가능하며 여러 존을 등록해 그것들을 선택하면서 편집하는 것도 가능합니다. 이것으로 인해 시뮬레이션 전체의 어떤 일부분을 자세하게 확인하고 싶을 경우 그 부분을 존으로서 이동함으로써 존 안에 있는 오브젝트에 집중해서 확인하는 것이 가능합니다. (그림19) 그리고 메인화면에 OpenMicroSim 형식에 출력하는 속도 버튼을 추가했습니다. 교통 해석 소프트웨어 S-PARAMICS와 VISSIM 파일로서 이용이 가능합니다.
ECODrive 플러그인 차량에서 도로 갓길까지 최단 거리를 로그 출력할 수 있게 되었습니다. 그리고 시나리오 실행중 3D 모델을 임의의 차도에 배치해서 거기서부터 앞으로 가는 진입을 막을 수 있게 했습니다. 이 모델은 시나리오 실행 중인 메인 화면 상에는 보이지 않습니다. 그리고 서로의 위치 관계는 간단한 구형을 갖고 계산됩니다. 이 보이지 않는 모델에 대해서도 로그 출력에 반영됩니다. |
| 마지막으로 |
| UC-win/Road Ver.6에서는 위에서 말씀드린 다양한 기능을 추가, 확장을 했습니다. 앞으로도 사용자 분들께서 해주시는 요망을 받아들여 개선, 개량할 수 있도록 열심히 노력하겠습니다. |
| (Up&Coming '11 늦은 가을호 게재) | ||
 |