●应用程序软件本体 ※Trial Version可从HP申请下载。
| 产品名称 |
新购价格 |
修订价格 |
详细 |
| UC-win/Road Ver.9 Advanced |
\900,000 |
\80,000 |
含点云建模、Civil 3D、InRoads、OSCADY PRO、xpswmm、12D Model等 |
| UC-win/Road Ver.9 Driving Sim |
\1,200,000 |
\180,000 |
含ECO驾驶、驾驶模拟器、微观模拟播放器、LOG输出插件等 |
| UC-win/Road Ver.9 Ultimate |
\1,700,000 |
\450,000 |
含Driving Sim及Advanced的全部插件选项和IFC/停车场模型导入/12d Model 插件等※1 |
| UC-win/Road Ver.9 Standard |
\580,000 |
\80,000 |
不含插件、选项的标准产品 |
| UC-win/Road Ver.9 Presentation Version |
\50,000 |
Free |
可使用Visual Option Tools等演示功能的产品 |
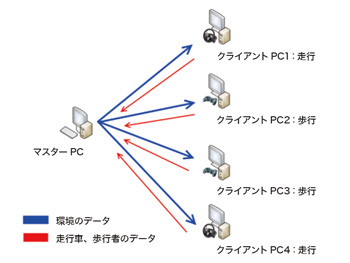
| UC-win/Road Cluster Client Version |
\50,000 |
Free |
集群选项(通过复数PC分散符合,实现多屏幕显示)的客户端PC用产品 |
| UC-win/Road Multi User Client Version |
\100,000 |
Free |
通常集群客户端外,还搭载驾驶和歩行模拟功能。集群中可与其他的多用户客户端同步 |
| UC-win/Road Free Viewer |
Free |
Free |
3D空间下可自由移动、脚本播放的免费浏览产品 |
※1 不含选项单卖产品(Road for SaaS、SDK、集群、Motion、RoboCar®等)。
●各种插件/插件对应表
| 产品名 |
Advanced |
Driving Sim |
Ultimate |
Trial |
新购价格 |
| 点云建模 插件 |
○ |
- |
○ |
○ |
\150,000 |
| 噪音模拟 选项 |
○ |
- |
○ |
○ |
\300,000 |
噪音模拟 选项
超级计算机选项 |
- |
- |
- |
- |
\18,000/月 |
| Civil 3D 插件 |
○ |
- |
○ |
- |
\75,000 |
| EXODUS 插件 |
○ |
- |
○ |
- |
\300,000 |
| GIS插件 |
○ |
- |
○ |
- |
\250,000 |
| InRoads 插件 |
○ |
- |
○ |
- |
\75,000 |
| OSCADY PRO 插件 |
○ |
- |
○ |
- |
\100,000 |
| Sidra 插件 |
○ |
- |
○ |
- |
\75,000 |
| S-PARAMICS连接 插件 |
○ |
- |
○ |
- |
\80,000 |
| TRACKS 插件 |
○ |
- |
○ |
- |
\150,000 |
| xpswmm 插件 Ver.2(for Tsunami) |
○ |
- |
○ |
- |
\300,000 |
| 3D模型输出插件 |
○ |
- |
○ |
- |
\80,000 |
| 场景 插件 |
○ |
○ |
○ |
○ |
\150,000 |
| 微观模拟播放器 插件 |
○ |
○ |
○ |
○ |
\300,000 |
| 通信 插件 |
○ |
○ |
○ |
- |
\300,000 |
| 驾驶模拟器 插件 |
- |
○ |
○ |
- |
\300,000 |
| ECO驾驶 插件 |
- |
○ |
○ |
- |
\300,000 |
| 重播选项 |
- |
○ |
○ |
○ |
\150,000 |
| LOG输出插件 |
- |
○ |
○ |
- |
\300,000 |
| 停车场模型导入插件 |
- |
- |
○ |
- |
\80,000 |
| IFC插件 |
- |
- |
○ |
- |
\80,000 |
| 12d Model 插件 |
- |
- |
○ |
- |
\75,000 |
| Legion连接插件 |
- |
- |
- |
○ |
\80,000 |
| 孟塞尔色系输出插件 |
- |
- |
○ |
○ |
\200,000 |
远程访问插件
(VR-Cloud® Flash Version) |
- |
- |
- |
○ |
\300,000 |
| 免费浏览输出插件 |
- |
- |
○ |
- |
\75,000 |
| 运动平台 插件※1 |
单卖选项 |
\800,000 |
| 超级计算机Cloud® 流体解析连接插件 |
\300,000 |
| VR-Studio®插件 |
\75,000 |
| 集群选项※2 |
\800,000 |
| 海啸插件 |
\300,000 |
※1:系统选项:仅提供系统开发用 ※2:基本构成 : 伺服PC 3台、服务器PC 1台
|