UC-win/Road活用システムの導入背景と目的
研究の深化に伴い、研究チームは運転者行動のモニタリング、実路での車両テストの面で堅固なハードウェアの基盤とデータ収集能力を蓄積し、交通行動・安全研究プラットフォームのプロトタイプを構築しました。この研究の過程で、実際の運転行動データ、車両運行データおよび、再現性が高く現実に即した運転環境を、高い自由度で統合し実験を行うための手法という、核心的な課題に直面したのです。
運転者の生理的・視覚的特徴のメカニズム探究、道路線形や交通施設の安全性評価、将来的なスマート運転システムにおけるヒューマンファクターの検証のいずれにおいても、実際の運転環境をシミュレーションで正確に再現すること、その仮想空間を自由に編集(天候、信号、予期せぬイベントなど)可能な実験環境が求められます。単に3次元で表示するだけの可視化ツールではなく、研究プロセスにおいて重要な役割を担うシミュレーションコアとして、高い精度と柔軟性、互換性と拡張性、運転シミュレーションをあらゆる面でサポートする機能を備えている必要があるのです。
このような背景から、国内外の複数のシミュレーションソフトウェアをレビューした上で、3次元モデリング、車両運動シミュレーションへの対応、様々なソフトウェアとの連携性が卓越したUC-win/Roadが採用されました。カスタマイズ開発の優れたインターフェースを持ち、シーン構築から行動ログ収集、データ分析まで一貫して利用できる研究プラットフォームの構築という技術ニーズにマッチしていたことが、その理由として挙げられています。
 |
| 研究室における UC-win/Road を活用したドライブシミュレータ |
教育カリキュラムにUC-win/Roadドライブシミュレータを導入
UC-win/Roadの導入により、従来のような机上での理論によって行われていた教育は、臨場感を伴う体験学習となりました。
コアカリキュラム「交通安全理論と技術」の再構築
UC-win/Roadを使用することで、2次元図面に依存して3次元空間を想像する必要がなくなりました。座学で学んだ平面・縦断線形、断面のパラメータを入力することで、リアルタイムに3次元の道路モデルが生成され、自分で設計した道路を運転シミュレータで走行することで、最適な道路線形、視距の要件における満足度、標識設置の合理性などが直感的に把握できます。この「設計~シミュレーション~体験~最適化」というクローズドループによって、学生は設計基準の背景にある安全性および人間工学的な配慮についての理解を深めることができます。
卒業設計/総合カリキュラム
UC-win/Roadは学生が複雑な課題を達成するための重要なツールとなっています。例えば、山間部区間における交通安全対策の設計課題において、学生チームはUC-win/Roadのプラットフォームを利用して、事故多発地点の現況を再現し、様々な改善案を設計。統合された仮想空間のシナリオの下で、被験者を募集して運転シミュレーション実験を行い、客観的なデータに基づいて複数案の効果を比較検証しています。
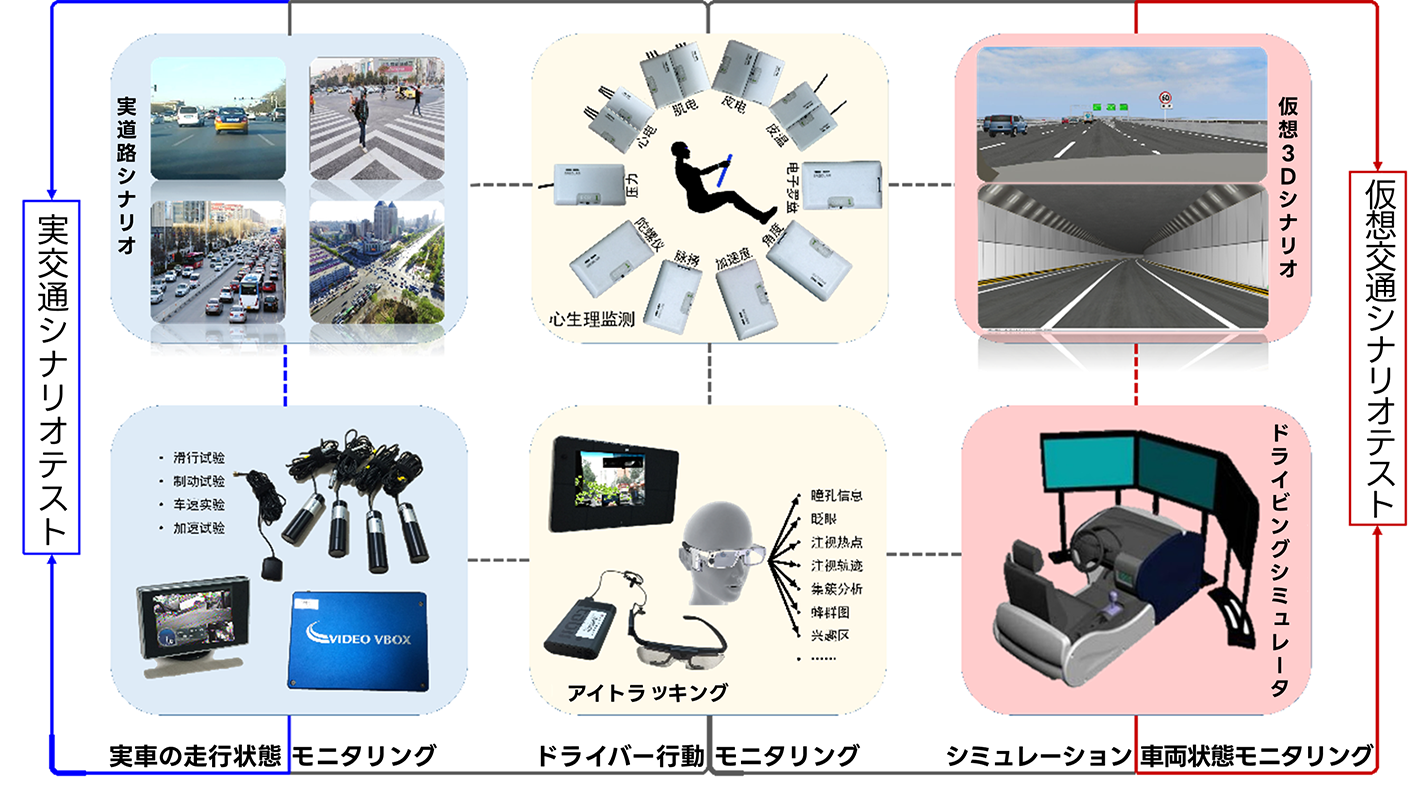 |
| 実交通データと仮想シミュレーションを統合し、運転行動と車両状態を多角的にモニタリングする研究プラットフォーム |
安全運転研究や高度交通制御システム研究におけるVR活用
マルチモーダル情報干渉下におけるドライバーの注意散漫行動の識別と安全影響メカニズム研究
研究チームはUC-win/Roadを利用して、高度に制御可能でリアルな都市高速道路と幹線道路の組み合わせシーンを構築しました。シーンでは、通常の交通流、ランダムに車両に切り込み、歩行者が横断するなどの多種の動的イベントが設計されています。プラットフォームのプログラミングインタフェースを介して、注意力散漫タスクを正確にトリガー・制御します。マルチモーダルデータの同期・融合による定量分析によって、視覚・操作型の注意散漫と認知型の注意散漫が運転行動に与える影響の違いが明らかになりました。本研究から複数の高水準のSCI/SSCI論文が発表され、警報アルゴリズムやインタラクションタイミングの最適化に重要な知見が提供されています。
自動運転における引き継ぎシナリオのヒューマンファクタ信頼性評価
人と自動運転システムの協調運転という最前線の課題に対し、研究チームは UC-win/Road の API を利用して、自動運転車両制御プラグインを独自開発しました。高速道路および都市道路における自動運転システムの故障を想定した、さまざまな引き継ぎ要求シナリオを仮想環境内に構築しました。
本システムでは、異なる警報方式や運転者の負荷条件の下での引き継ぎ性能を評価し、引き継ぎの信頼性の予測モデルを構築しました。研究成果は国内外の高レベル学術誌に直接発表され、自動運転システムのヒューマンマシンインタフェース設計の最適化において重要な内容となっています。
 |
環状トンネル出口の分流、悪視界環境、歩行者・障害物対応など、
複数の交通シナリオを再現したドライビングシミュレーション |
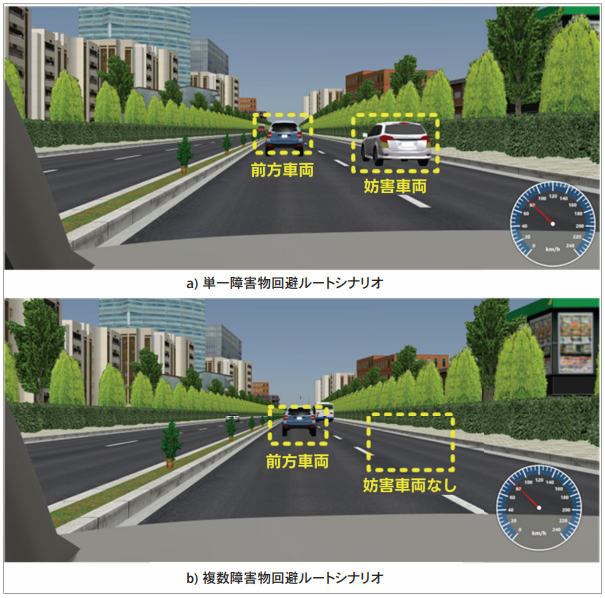 |
| 前方車両の状況と障害物の有無に応じた回避ルート選択シミュレーション |
VRを活用した実験・研究の応用および今後の展望
今後を見据え、北方工業大学の交通行動・安全研究チームは、フォーラムエイトおよび UC-win/Road との協力に大きな期待を寄せており、応用および高度化に向けた明確なロードマップを描いています。
システム統合の高度化
UC-win/RoadとBIM、交通シミュレーションコア(VISSIMやSUMOなど)よとの双方向データ連携をより深く追求し、設計からシミュレーションまでを統合したワークフローの実現を目指します。
研究応用シナリオの拡大
・路車協調システムおよび自動運転試験:UC-win/Road の豊富なシナリオ編集機能を活用し、多様な危険事象を含む仮想実験場を構築し、インテリジェントな車両アルゴリズムの検証に活用します。
・デジタルツイン都市研究:リアルタイム交通流データへのアクセスを試み、仮想都市モデルの動的運行を駆動し、ミクロレベルの「デジタルツイン」交通システムへの探索を行います。
・実験プラットフォーム構築:UC-win/Roadを核として、マルチチャンネル湾曲スクリーン、VRヘッドセット、モーションキャプチャ装置などを統合した「スマートシティ・交通VR融合シミュレーション研究室」の設立を計画し、中国国内における研究・教育の没入型環境の構築を目指します。
・教材開発:UC-win/Road豊富な応用実績をベースとして、実験チュートリアルや専門教材シリーズの開発を計画し、より多くの教育機関に貢献します。
交通行動・安全研究室における UC-win/Road 活用関連の研究プロジェクト
[1]国家重点研究開発計画:
多源データに基づく補助運転自動車の操縦行動解析技術研究、2023-2026
[2]国家重点研究開発計画:
異種主体多次元相互運用技術アーキテクチャと検証プラットフォーム技術、2022-2025
[3]国家自然科学基金プロジェクト:
心物場理論に基づく交通事故原因メカニズム及びリスク評価2016-2018
[4]北京市教育委員会科学技術計画一般プロジェクト:
多衝突タイプにおける運転者の相互作用行為特性及び事故リスク警報方法の研究、2023-2025
[5]道路災害防止及び交通安全教育部工学研究センター開放基金重点プロジェクト:
運転者が感知した交差点運転意図認識とモデル化に基づいて、2022-2024
[6]北京市優秀人材育成プロジェクト:
視覚特性に基づく信号交差点運転認知行動モデルとリスク評価、2015-2016
|







