面向建设机器人的3维信息表示技术的有效利用,
拓展3维实时VR的新可能性
此次,介绍位于富士山富士市,占地15万平方米的大范围土地且拥有多样的试验等设施的,社团法人日本建设机械化协会的附属机关「施工技术综合研究所」。
以购入FORUM8的「UC-win/Road」为契机,该研究所广泛的业务中,以及信息通讯技术(IT)和机器人技术的基础上,该研究所的目标瞄准的是新型施工系统的项目开发。尤其是对人和建设机器人在协调进行工作时候的接口问题的研究,将信息通过3维可视化的工具引起关注。针对此项目,包括有关信息化施工的各种各样的组合搭配,我们对该研究所研究第四部次长上石修二先生进行了采访。
通过促进建设事业的机械化,将国土开发和为经济发展作贡献作为目的,1950年开创了「社团法人日本建设机械化协会」。「施工技术综合研究所」为其中研究机构之一,从事与建设机械及机械化施工相关所有的试验和研究,作为以提高建设机械技术、建设事业的合理化作为目标的研究机关,成立于1964年 (当初称作「建设机械化研究所」,02年改名)。
除了云以外没有任何遮照物的雄伟的富士山的大全景。这个倍受大自然恩惠的研究据点(东西450m·南北350m的区域)内,设有一周750m的测试路线,音响力水平测定场,骨材破碎试验设备,大型疲劳试验机,设置了各种试验机·试验场 — 等丰富多彩的室内·室外设施。共计74名职员(其中,事务职员14名,土木·机械·资源·地质·电系类的技术职员60名:04年11月至现在)。土木工程,岩石工程,混凝土工程,隧道工程,基础工程,水库工程,以及桥梁工程,与建设工程相关的全部机械化施工法、与建设机械相关的调查研究,开发,试验研究,技术指导等均可在此进行。
协会的成员原本就是由国内主要的建设机械制造厂及相关用户等建设企业为中心构成的,该研究所主要接受来自国土交通省、地方公共团体,各种基础设施整备业主单位的业务托付,以社会或业界共通的需要为基础,致力于上述方面的各项业务。
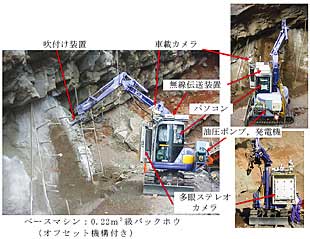
作为前面介绍到的从侧面表示了特征性的开发项目,上石修二举了「无人化施工技术(喷涂机器人)」的例子。此项目是针对富士山西侧从山顶到山腰部的砂土持续流失「大崩溃」,国家级直辖防沙事业从69年开始,并且对发生源(源头域)的调查工程从1982年就开始了。特别源头域陡峭且狭隘,是标高较高的危险区域,加之考虑到对景观和环境等的要求,受国交省富士防沙事务所的托付该研究所98年以后,作为确保安全清除难题的手法,展开了「无人化施工技术」的开发·引进的工作。其结果,容易坍塌的火山灰层的喷涂,通过使用多眼立体相机的距离测量装置等,实现了对喷涂厚度分布和坡度形状的远距离操作管理。
「另一个项目是,稍微有些变化的『通过飞行船的盾构隧道监视系统』」
此系统为,飞行船在不撞到盾构隧道内壁的同时,边飞行边记录周边的映像的检查系统。计划将原本只能通过目测来检查的盾构隧道的维持管理进行系统化,该研究所在04年度进行了开发和试运行。
「经过一连串的建设事业过程,通过有效的利用信息,特别考虑到在施工过程中的便益,专门对各种应用软件进行了讨论」
作为自身相关的主要业务之一,上石修二对「信息化施工」的搭配组合进行了如下说明。
国交省01年3月制定政策以来,信息化施工具体化的基础和被赋予地位的「信息化施工的意象」。此内容是依照同省97年以来「信息化施工促进检讨委员会(委员会:大林成行原京都理科大学教授)」推进的讨论为蓝本的。该研究所担负着该事务局的一端,换句话说从信息化施工开始的时刻起,就成为与自身相关的业务内容了。
首先,根据国交省作为信息化施工的第一弹03年12月制定了「利用TS-GPS的填土加固信息化施工管理要领(方案)」。这是使用总数站(TS)和GPS(泛地球测位系统)通过实时测量加固机械的位置,把握填土面的加固回数,同时能表面性地进行填土的质量控制。接下来目前是,(1)对完成形管理的必要设计信息、完成形信息的3维数据化,TS下完成形的3维坐标数据的获取,通过专业软件进行施工管理和帐票管理的,所谓「利用TS的完成形管理要领(方案) 」(2)通过3维设计数据直接控制机械,更是一边对加固机械的工作位置进行连续管理,一边通过TS测定3维测量数据完成形,即所谓的「铺装工的信息化施工要领(方案)」— 等一系列来年度瞄准的目标动向。
关于这些,该研究所一方面与占主导的国交省的各地整、同省国土技术政策综合研究所(国总研),独立行政法人土木研究所(土研)等相联合,同时也致力于事前的施工实验和基于要领 (方案)的试行工程。
信息化施工的引进后逐渐扩展到各种各样的施工现场,对用各自的系统处理的数据交换也越来越被要求标准化。目前正专心致力数据格式的ISO化,上石修二自己作为委员也有参加。特别在「ISO/TC/127/WG2(土木机械及走行式道路建设机械-施工现场情报交换)」,日本在信息模型和数据词典的作成过程中起着主导性作用。
 |
|
 |
|
 上石修二次长 |
 |
 |
|
 |
|
 |
|
 |
|
 |
|
在研究所内上石修二总结的另一个题目是建设机器人的研究。关于这个,由于国总研的「利用3维信息的施工管理技术的开发」和土研的「建设机械的IT施工技术的开发」在同时进行中,分别成为各自项目的核心。
其中前者是,有关施工管理的信息在3维CAD数据或者产品模型做的设想。今年的预定为,从3维信息的测量·管理和有效利用技术这个切口开始,包括「将怎样的模型交付给现场,怎样评价其结果」的讨论总结在一起,以国总研为中心提案的土木工程标准性模型为基准在进行实证实验。
该研究所在实验中,尤其是对模型及其基本的信息利用部分的整理,实证实验,重新施工的必要性管理基准的讨论等,投入了主要的精力。
另一方面,后者的地位不是仅仅只作为自动化建设机器人,让各种各样的信息在可能的环境下获得应用,上石修二认为需要进一步明确。
在此首先,把实时施工状况作为3维信息进行计测,从机器人必需的外界传感器的机能方面到激光系统与立体声处理相关的系统开发方面,都在努力。
同时,从「人和建设机器人如何协调工作」的接口这一非常重要的观点来看,到07年度为止的跨5年项目中该讨论也在进行。可以举的一个例子是「3维操人员支援viewer」的研究。这是由3维CAD数据作成的建设机器人的施工目标与从外界传感器得到信息作比较。并且,预想是能与操作人员进行对话的系统。特别在此处,3维CAD数据和现场的形状,或者说图像等作一些处理,对于向操作人员传递信息,将「UC-win/Road」为基础的讨论仍然在继续。
「对多发自然灾害,通过小型飞行体等取得的信息,如何早期把握受害状况,作为研究所的新的讨论课题被提到了议事日程」
此处,人根据目测进行判断的部分也打算导入IT的过程中,从施工向维持管理逐步扩大,可以考虑为是与信息的新型活用可能性相关联的部分。
同时,无人化施工技术在灾害后景观修复的应用可能性也是很高的。为此,上石修二在本次安排中也谈到了,到目前为止,为配合建设项目的发展,新型建设机器人应该会越来越受到重视的看法。
在这里再次对在繁忙的工作中,对于本次采访给与协助的有关人员表示感谢。
 |
 |
|
| LIST | NEXT |