以虚拟现实软件UC-win/Road为平台构建的高性能大型驾驶模拟器
8DOF交通安全模拟器
概要
本驾驶模拟器是由中国交通运输部计划用于交通安全研究的大型订制模拟器系统,由交通运输部公路科学研究院负责技术规格部分的编写。
在2009年1月的国际招 标中FORUM8公司单独中标,系统最终于2014年2月完成验收。下面将就以虚拟现实UC-win/Road为平台的 高性能大型驾驶模拟器系统的功能概要进行解说。

功能及特点
系统整体概要
-
8DOF交通安全模拟器是由6自由度运动平台和Yaw Table转台、X Table长行程所构筑的8自由度车辆运动模型实车件事 模拟装置。
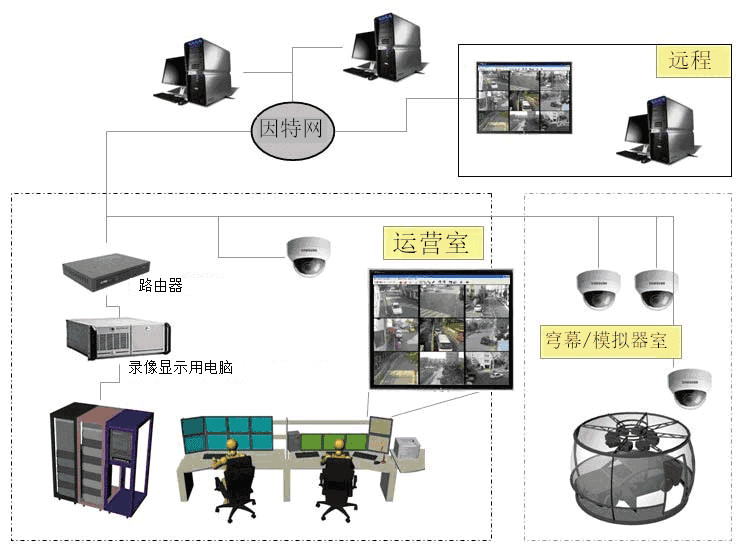
通过虚拟现实UC-win/Road的集群及360度投影装置,音响系统,振动装置等共同营造出无限接近实际的驾驶环境,穹幕内可短时间进行轿车客舱和卡 车客舱的替换,同时还具备CCD摄像机,影像显示器和录像系统等高级管理系统。
交通流仿真器、车辆动力学仿真器,眼动仪等高水准的计测装置与UC-win/Road实现联合仿真,为高级安全驾驶研究做出贡献。

▲系统整体构成示意
系统构成
-
- 多种驾驶环境下驾驶员生理,心理特性的测量,分析和研究功能(车道变更、加减速、转向等)
- 部同年龄段驾驶员(青年/老年/未成年人等)驾驶行为研究功能
- 注意力分散(手机、广播等)对交通安全的影响研究功能
- 疲劳对交通安全影响研究功能
- 饮酒、疾病、药物对交通安全影响及缺陷驾驶行为研究功能等。
- 设计阶段公路安全性评价功能
- 运营及维护阶段的公路安全评价功能
- 特殊路段(长大下坡、隧道、急弯、交叉路口等)安全保障技术研究功能
- 道路照明、诱导和能见度变化等条件下的驾驶安全研究功能
- 道路景观及交通设施设置的虚拟化设计功能
- 路网条件下道路安全保障技术研究功能等
- 恶劣气象(雾天、冰雪、高低温、雨雪大风等)条件下的交通交通研究功能
- 极端交通(交通事故、异常交通事件等)条件下的交通及应急保障对策研究功能
- 新型ITS车载装备验证功能
- 交通事故再现及司法鉴定功能等

■预想效果及功能
1.驾驶行为研究
围绕道路交通系统中「人」的要素,本驾驶模拟器能够真实再现驾驶员的驾驶感觉,具有驾驶员驾驶行为的 研究功能。例如:
2.道路交通安全研究
针对道路交通系统中「路」的要素,本驾驶模拟器具有道路交通安全研究功能。例如
3.特殊环境下的交通安全研究功能
针对道路交通系统中「环境」要素、本驾驶模拟器可以研究环境因素对交通安全的影响原理和作用机制,具有环境,特别是特殊环境下的交通安全研究 功能。
4.其他
本系统可忠实再现驾驶员的驾驶感觉,应用与驾驶行为的研究。
SYSTEM
-
- 再现行驶中路面的凹凸感(Direct Setpoint)
- 再现行驶中不同路面谱的振动(Frequency Spectrum)

▲系统构成图
■穹幕 DOME
穹幕由8面FRP素材板构成。FRP属于轻量硬质的素材,在遮罩车辆客舱的同时,也为投影系统充当投影现实屏幕的作用 。


▲穹幕上部(照片上)、穹幕入口(照 片下)
■多通道投影系统Multi Projector System (8 units)
Barco SIM5R Projector
多通道投影系统由8台高性能模拟器专业仿真投影仪构成。运用边缘融合处理提供360度全景车辆行驶环境。投影仪的朝向,投射角度由专业咨询公司经过光路设 计和验证,确保驾驶员的视野不受干扰。




▲Barco SIM5R Projector
■实车客舱 Real Car Cabin (Honda Accord)
Honda Accord 轿车客舱采用的是1台 本田雅阁的实车。将实车的引擎部分摘除,并安装电子控制系统和音响用电脑。此外,客舱内还布置 有外用电源和网络接口。为了维持高逼真度的驾驶感,方向盘,油门踏板,刹车踏板都使用实车部件。



■卡车客舱 Truck Cabin
Order Made Truck Cabin
方向盘、油门踏板&刹车踏板、驾驶舱座椅、安全带采用的是现代卡车实车的部件。




■转台 Yaw-Table
Bosch Rexroth Yaw-Table for EMotion-4000
转台设置在6DOF运动平台和车辆客舱之间,用于交叉口,急转弯时辅助车体的旋转,更加真实地表现车辆行驶位姿。

■振动系统 Vibration System
Bosch Rexroth EMotion-4000 Vibration
振动器安装在转台和车轮的连接埠,当车辆行驶在不同材质的路面上时,通过高频振动可表现出细微的差异。



■六自由度运动平台 6DOF Motion Platform
Bosch Rexroth EMotion-4000-6DOF-700-MK2
表现车辆行驶中基本的车辆运动模型,通过车辆动力学计算忠实再现车辆行驶过程中的位姿。车辆位姿由Pitch、Roll、Yaw、Sway、Surge、 Heave 六个方向组合实现。





■长行程单元 X-Table
Bosch Rexroth Order Made Long Excursion 1 Axis Motion Table
安装在地面上支撑六自由度运动平台的长行程直线运动系统。用于车辆在长距离连续加速时传递给驾驶员离心力。

■集群计算机系统 Cluster Computer System
集群计算机系统有1台主控计算机和8台显 示用计算机构成。各投影通道由专用PC负责描绘,主控机队8台显示计算机进行同步管理,实现360度全景映像输出。






■视线追踪系统 Eye tracking System
face LAB 是由澳大利亚国立大学(ANU)独立出的SeeingMachines公司开发的产品 。
该系统是基于2台摄像头的信息自动实时追踪,对人的面部运动进行计测。系统通过图像捕捉面部的三维特征,对面部特征抽样并追踪相关特征信息。
当面部特征在 画面上发生变化时,系统会动态选择新的特征,即使头部进行转动,画面中的面部图像部分出现错位,依然可以追踪相关轨迹。输出数据包括眼球运动数据,头部为 主,转动数据,眨眼,唇和眉的动作和瞳孔数据。
面部自然传递被检测者的信息,通过面部观测计算被检测者的意图,注意力集中度。通过对面部的计测创造出人机互动的新界面。


■交通流模拟器 Traffic Simulator
Vissim 通过考虑详细车辆的相互影响 ,例如拥堵,混杂导致的公共交通延迟,自行车专用车道导入时的影响等,是一款可以从微观视角抽出课题,解决课题的微观交通仿真软件,在车辆应用方面, Vissim 可对自行车,机动车,公交车,计程车,短途列车,长途列车等复合交通模型进行仿真,用于混杂导致的公共交通的延迟预测,以及自行 车专用车道导入的效果验证等。

■车辆动力学模拟器 Vehicle Dynamics Simulator
CarSim 和TruckSim是美国Mechanical Simulation公司开发并以商品化的车辆动力学仿真软件。可对车辆 (轿车、卡车、公交车、摩托车)在各种驾驶条件和环境条件下的行为通过简单操作进行评价,是面向控制设计人员和技术人员的一款工具软件。被全世界超过30 家的车辆制造商,超过150所大学,研究机构利用,已经成为车辆动力学仿真软件业界的标准。尤其作为车辆运动控制,ITS相关研究和开发的有效工具获得一 致好评。此外,作为动态行为的应用,也用于车辆侧翻事故分析和道路设计。







其他辅助系统(音响、电源、DVR)
-
音响系统
为确保系统整体的性能,音响系统由单独的Sound PC构成、支持行驶中自车的声音,周围仿真环境音及客舱和控制室内的通讯

电源系统
为了保护计算机系统不受突然停电造成实验数据的丢失,本模拟器在电源和计算机系统之间连接有UPS(应急电源装置)UPS在遇到停电后自动启 动,可提供10 ~ 20 分钟时间用于关闭系统以及将运动平台返回Settled位置。此外,电源系统分为ACC#1 和ACC#2 两阶段 管理,实现6DOF运动平台和其他运动装置(X-table/YAW-table/Vibration)的独立控制。

DVR系统(Digital Video Recorder)
客舱,穹幕和模拟器控制室内设置了多台CCD摄像机,用于系统运行过程中的监控。同时具备录像功能,可与LOG数据一并用于驾驶员驾驶行为的研究。


行驶环境生成及模拟 UC-win/Road
-
- 直线,圆曲线,缓和曲线等道路平面线形的模型
- 坡度、纵断线形的模型
- 路肩、车道、路缘石、中央分隔带、紧急停车带等横断面模型
- 可模拟滤清,混凝土,砂,土等路面材质
- 桥梁、隧道、平面交叉、立体交叉等特殊道路模型
- 土质,框架保护,石质的坡面模型
- 树木、花
- 大楼、收费站、加油站、服务区等
- 平原,山区,城市,郊区等地域特征景观
- 天空,山,河流等地理景观
- 交通信号、护栏、消音壁、信息牌、照明设施等交通设施
- 机动车、非机动车、行人等交通流模型及动物等。
- 引擎、喇叭、轮胎,不同材质的路面,车 辆和空气(隧道)、模拟车辆和障碍物的相撞音
- 模拟道路交通系统的各种背景音
- 可搭载雨,风等各种环境的背景音
三维实时虚拟现实软件 UC-win/Road
三维实时虚拟现实软件UC-win/Road于2002年获得软件产品年度大奖。在各类项目中通过简单PC操作,即可完成大规模空间制作,是一款功能强大 可进行实时模拟的先进软件。
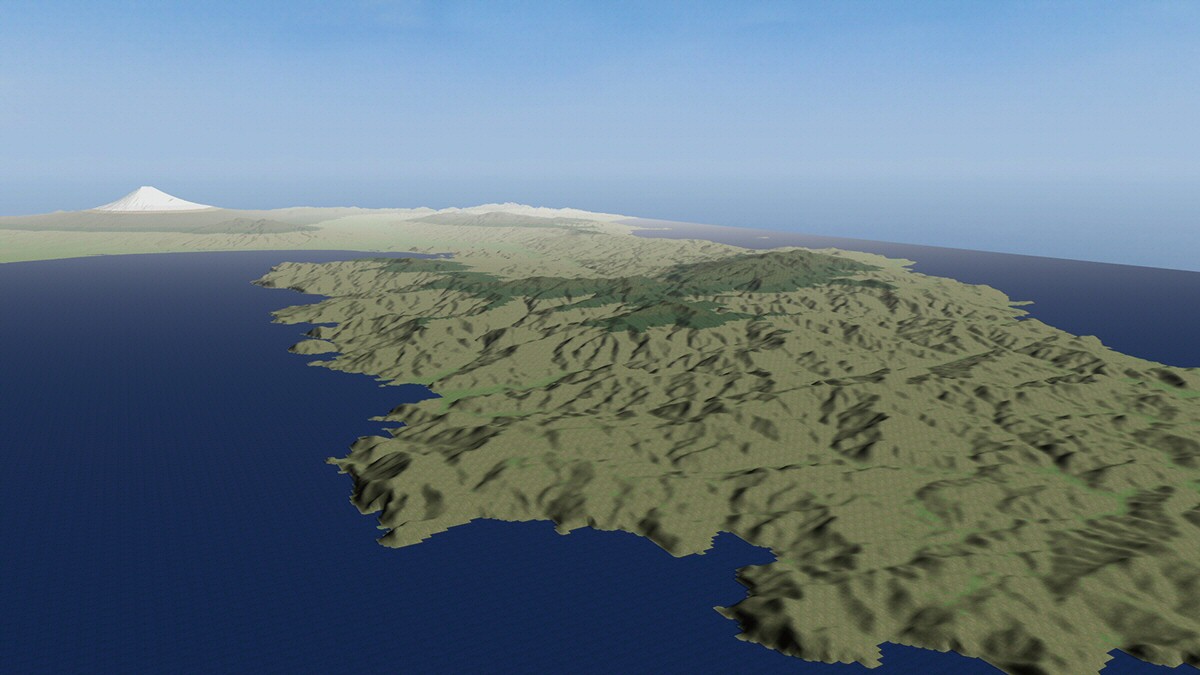
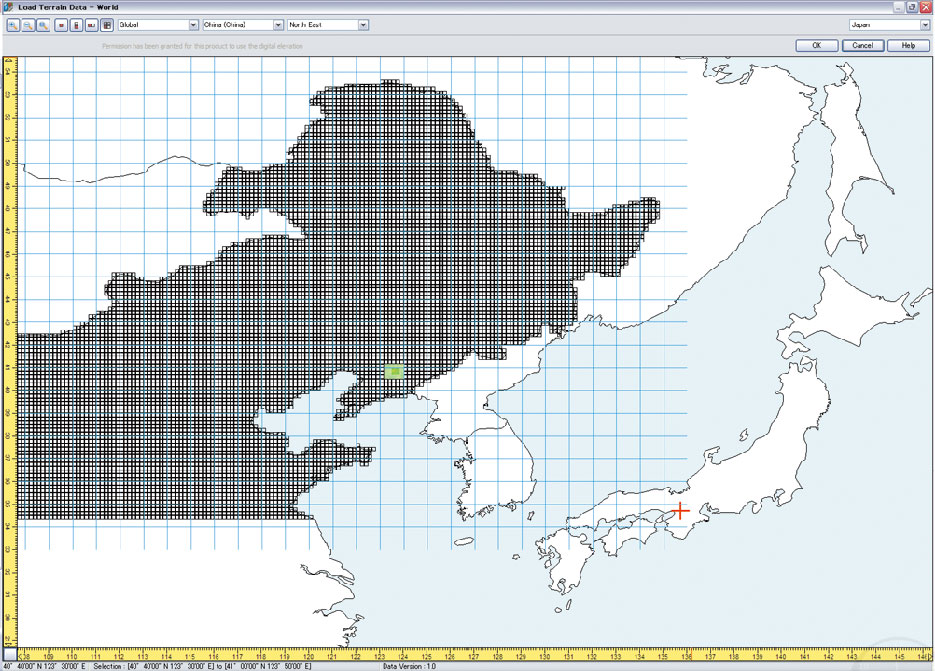
■地形建模
技术指标:对应中国地形
对应:SRTM(90m网格)世界测地系。支持黏贴航拍图片,DXF-XML转换、 3D、2D地形编辑等功能。

■道路建模
技术指标:
对应:
道路・河流・湖泊・飞行路径等各种线形可通过参数或样条曲线的输入,自动生成道路,隧道,桥梁,河流,步行路径。对应道路平面线形(缓和曲线・样条曲线)。 纵断面线形定义隧道,桥梁区间的设置。截面定义中均可进行落石台,边坡处理,材质设置等。复杂道路结构也可简单完成线形,截面的制作。



■気象特殊効果
技术指标:
可仿真与雨,雪,冰等的路面模型,路面特征。
对应:
除对应各种特殊气象的表现外,可通过路面 设置摩擦系数和振动。支持雨,学,指定范围设置雾的效果,雷,闪电,雨刷,路面溅水等功能。

▲路面反射

▲水溜り

▲雨紋

▲雷
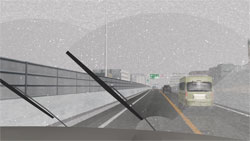
▲ワイパー(雪)
■Road DB
技术指标:
对应GB5768表示规范,包括道路标识,警告标识,向导标识及其 他表示模型。
(可提供 SDK、可进行客制化开发)
对应:
全面对应「GB5768」版道路交通标志和标线规范,可通过 Road DB下载。
■3D 建模
技术指标: 支持下述模型
对应:
利用DB可瞎下载丰富的标准模型/材质模型。此外,软件内置方便的 编辑,移动的功能,可对模型进行放大, 缩小,移动,旋转,倾斜等配置调整,通过设置动作还可制作可动模型进行动作控制。

■连接功能
技术指标:
关于道路及设施模型的导入,支持其他建模软件(Creator、 VEGA等)的外部导入
对应:
UC-win/Road 支持3DS、FBX、MD3、COLLADA、OBJ等模型格式的导入。
■数据连接
技术指标:
支持AutoCAD等外部数据的导入。
对应:
通过LandXML可与各类CAD进行 3D/2D数据交换。通过对应开源格式LandXML 支持与Civil 3D、InRoads 等CAD产品的接口,可转换地形,道路线形和截面信息。 可转换地形,道路线形和截面信息。LandXML的 LandXML.org 输出功能已在UC-win/Road 的开源官方论坛LandXML中获得认证。

■VISSIM 支持
技术指标:
提供 与交通模拟软件(VISSIM)的数据接口
对应:
对应导入VISSIM的交通流分析结果并 可视化。运用微观模拟播放器可将 VISSIM的ANI.TXT 文件导入到UC-win/Road 。导入模拟结果后,设置模拟显示位置,分别制定车辆和行人的现实模型。最后,交通分析结果可想动画一样播放,并在三维空间中确认交通状况。

■驾驶模拟,场景功能
技术指标:
特定交通事件的模拟(冲突、超车、接触判定等)、交通堵塞的表现
对应:
通 过场景功能可对模型进行各种既定动作的 设置。场景功能是指从模拟开始到结束的过程中,通过设置条件出发一系列事件的功能。根据需要表现的现象或测试条件,编写相应的场景后进行模拟,可更加有效 地表达VR数据的制作意图。编写相应的场景后进行模拟,可更加有效地表达VR数据的制作意图。通过场景功能中搭载接触判定,冲突时的警告(文本或声音)及 多媒体播放功能。

■VISSIM 支持
技术指标:
对应:
使用OpenAL,模拟多种环境音,其他 车辆音,自车音(引擎音、轮胎音、风切音、隧道发射音)。对应低通滤波器。滑音、4轮音再生。沥青上的车辆急加速,急刹车,急旋转的声音。
■驾驶模拟・场景功能
技术指标:
提供包括车辆轮胎特性在内的正确的运动模型,特别是转弯时的方向转换,加速,减速功能可与实际数据很好得对应。
对应:
为了再现汽车(4轮车)的运动模型,在UC-win/Road里安装车辆全体动作模型,引擎,从引擎到车轮位置的各传送模型,展现更逼真的运动表现。以下是可表现的现象。
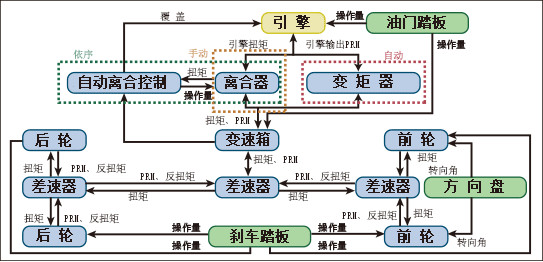
■车辆行驶模型
技术指标:
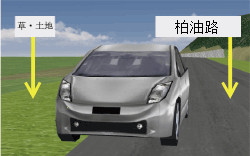
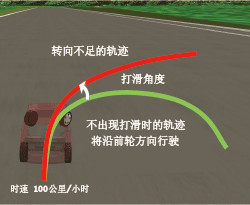
动态模型可正确模拟气象(雨、雪、冰)状态的路面下侧滑,刹车性能。
对应:
可表现转向不足和转向过度。转向不足是指高速行驶时前轮角度如果不 大于低速行驶时的角度车辆无法实现相同转向的现象。如果速度过快即使打方向盘车辆也不会大幅转弯,物发安全驾驶。转向过度则是指转弯过程中后轮大话,发生 比通常急速的旋转现象。




标准驾驶模拟模型 UC-win/Road
-
配合驾驶模拟器制作了下述4中典型的VR模型数据。典型路段数据均 基于中国实际的道路建模,是可以辅助驾驶模拟器有效应用的实时VR模型。数据提供场景功能,环境切换功能,车辆运动模型切换等丰富的驾驶行驶环境。

■城市道路VR数据
基于北京市三环线为中心对首都特有的城市道路网进行了再现。对权限道路标识,标线(对应中国GB5768-2009规范)和向岛牌基于实地取材进行建模和 配置,对具有北京特色宽敞的道路路幅,苜蓿也行立交等数十处立交桥进行了制作,沿线的道路设施,建筑物进行了重视再现。加上包括08年奥运场馆的「鸟巢」 等地标性建筑物的配置,真实地烘托出了北京城市环线所特有的空间感。




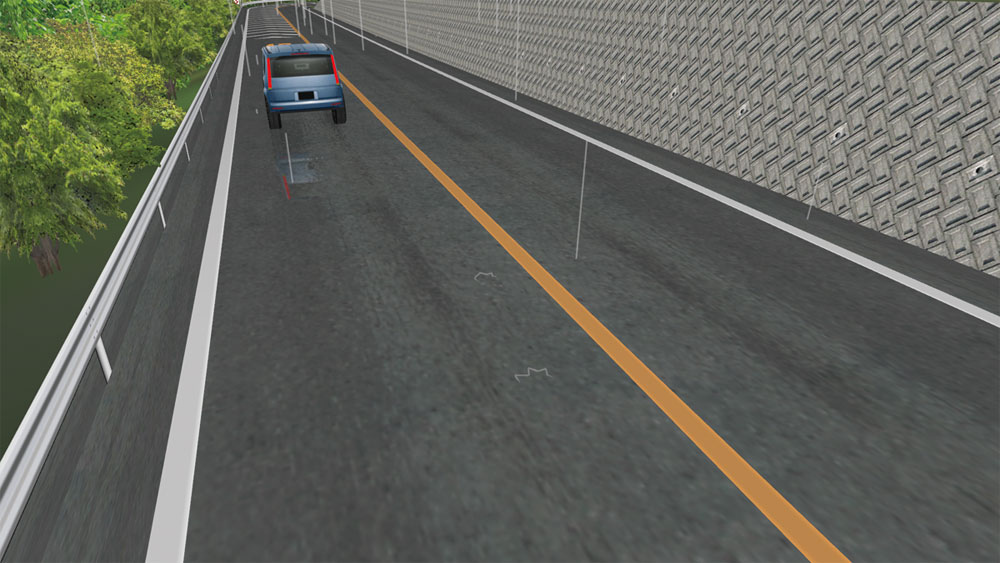
■高速道路VR数据
国道G110的扩宽业务为北京的实际数据模型。以往双向2车道的一般国道扩建为分离式路基的双向4车 道道路,运用 UC-win/Road基于建设中的设计图纸进行了数据制作。真实再现了施工期间大型卡车的交通流特征,并在场景功能中加入雨,学,冰冻路面等特殊气象。 此外,对于本系统可替换卡车客舱值特点,数据制作过程中照顾了适宜的驾驶空间,重视再现了车辆和驾驶员的感觉。




■山岳道路VR数据
对国道G109的部分区间进行再现的VR数据,为了让驾驶员真实感受到车辆在不同转弯半径上通过时驾 驶模拟器带来的加速度感及离心力,对道路结构进行了忠实再现。参考实地拍摄的视频对连续弯道进行了制作,包括道路的横截面,侧沟,排水路,边坡材质等均参 考实地拍摄的照片素材进行了再现。




■无限循环道路数据
以疲劳驾驶研究为目的制作的VR数据,利用二次开发「交通接续」功能,驾驶员可在场景路网内无限循环驾驶。道路结构则财通中国具有代表性的典型横截面,根据实地手机的路况信息进行了交通流车辆的忠实再现。