|
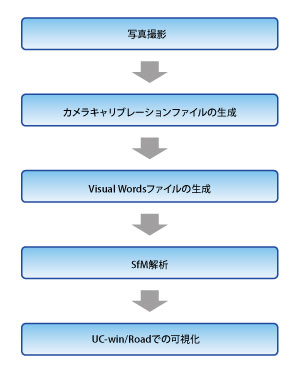
SfM插件,可以執行即時分析和重點分析。即時分析為,上傳到資料夾裡的圖像在暫態被分析並生成點雲資料。但是會消耗大量的記憶體。重點分析為,分析前設
定物件圖片,只分析設定的圖片輸出分析模型。這種分析不大量佔用記憶體,但是這一分析只可以處理連續的照片,對於不連續的照片無法輸出分析結果。
重點分析
選擇分析的照片,設定分析條件後,開始分析,算出照片的各個視點位置,並在三維空間內表示。根據分析進程的推進點雲數量的增加,構造物也變得可見。所有的畫像分析結束後確認空間中的點雲。如果點雲數太少的話,將分析條件選定為『點雲數量優先』,然後再次執行分析。
或者中途終了分析的情況下,變更開始的圖像,除去那些停止解析的畫像,再度執行解析。。
特徵點檢出演算法
作為檢出特徵點的演算法,有SIFT、SURF兩種可供選擇。
SIFT(Scale Invariant Feature Transform)
檢出特徵點以及記錄特徵量的演算法,標準的變化或者是回轉等理由被記述。SURF相比,處理速度相對較遲但是識別度很高。
SURF(Speed Up Robust Features)
SIFT改善後的高速演算法,相比SIFT處理速度慢但是識別度相對較低。

■圖4 拍攝的照片 |
■圖5 SfM插件畫面 |

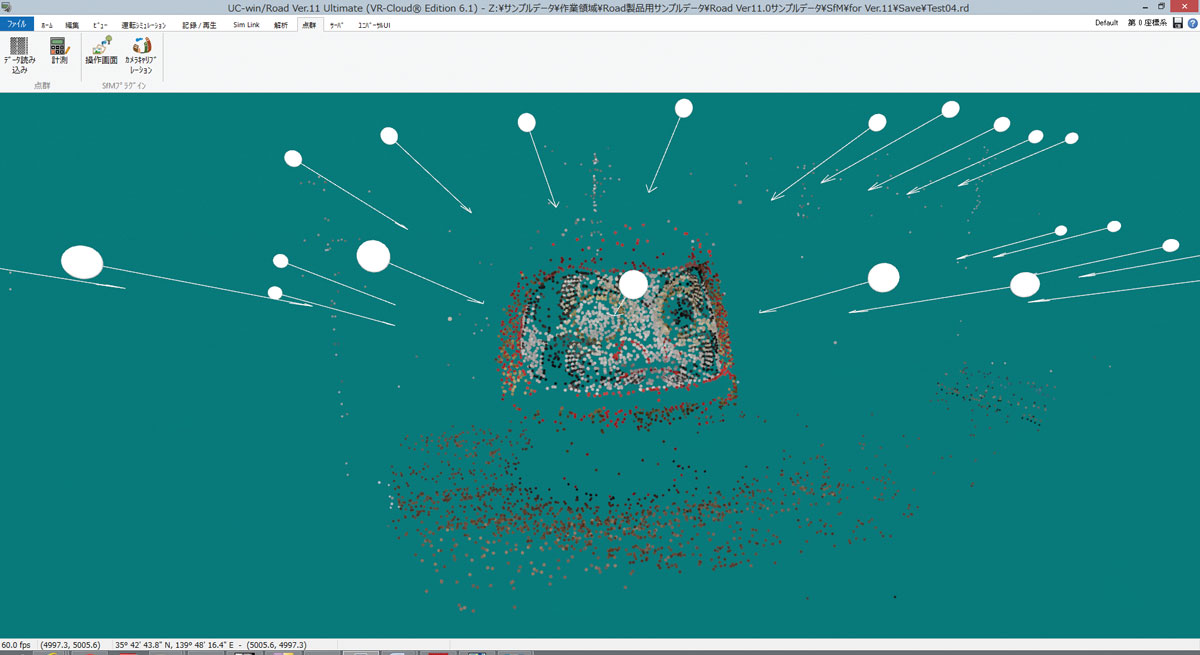
■圖6 SfM插件的分析結果:點雲、照相機的位置與其面向
(顯示白色的球體與箭頭) |
|