UC-win/Road在2010版本5.0中配備了點雲顯示功能,並在之後實現了VR空間中點雲和各種資料的結合運用。
進入今年後,公開了各地的點雲資料,並且利用點雲資料的趨勢越來越大。
這次,我們將介紹已增強並擴展到版本14的點雲功能。
點雲數據讀取
透過點雲建模外掛程式,可以導入點雲資訊並在3DVR空間內即時表現出來。雖然測量點雲的儀器有固定式雷射掃描來測量,也有透過移動式3D測量系統MMS進行測量,但是UC-win/Road中可以將這兩種形式同時使用。例如,可以用MMS形式展現道路沿線的景物,在測量不完全的地方再用固定式資料進行補充。
另外,根據測量方式不同,檔案格式也會有.csv、.xyz、.txt等文本文檔格式和.las等二進位格式。從ver.13.1.0開始,UC-win/Road就可以對應文本文檔格式和LAS檔案格式。
1. 讀取設置
首先,在讀取點雲資料前,要進行格式設置。在“點雲建模外掛程式”介面中,點擊右上角的“設置”選項。
 |
| 圖1 點雲建模外掛程式介面 |
打開點雲設定介面,可以對點雲形式、坐標系、色彩強度參數等進行調整。
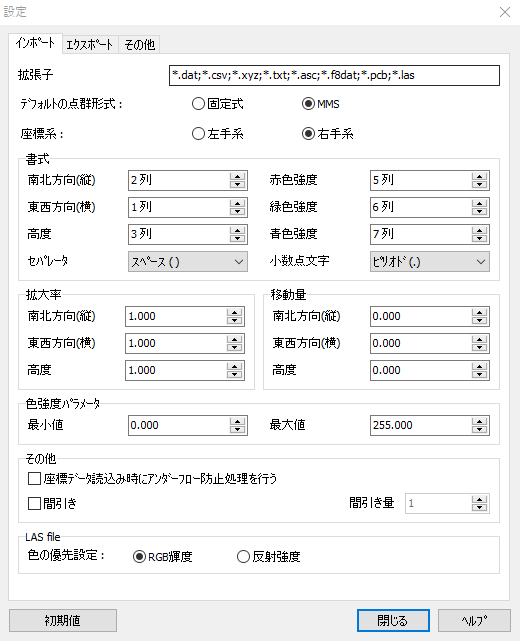 |
| 圖2 點雲讀取設置介面 |
- 預設點雲格式:可以指定所讀取點雲的格式是固定式還是MMS
- 坐標系:可以指定坐標系是左手坐標系還是右手坐標系
- 南北方向(縱軸):可以指定縱軸的座標值資料對應哪一列資料
- 東西方向(橫軸):可以指定橫軸的座標值對應哪一列資料
- 海拔高度:指定海拔高度值對應於資料的哪一列
- 紅色強度:指定顏色的R(紅色)值對應於資料的哪一列
- 綠色強度:指定顏色的G(綠色)值對應於資料的哪一列
- 藍色強度:指定顏色的B(藍色)值對應於資料的哪一列。
- 分隔符號:選擇資料項目的分隔符號代碼
- 衰減字元:指定十進位字元(符號)
[空格()/逗號(,)/句點(。)/定位字元(\ t)]
- 顏色強度參數:設置要讀取的點雲資料的顏色強度的最小值和最大值(預設為最小值0,最大值255)
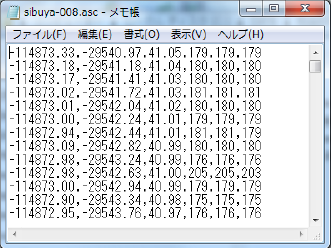 |
| 圖3 點雲資料檔案格式示例 |
在圖3的點雲資料檔案中,資料定界符用逗號(,)表示,小數點字元用句點(.)表示。 點雲資料檔案表示一行中一個點的資訊,並且從一行中提取下一資訊。
- 東西方座標值
- 南北座標值
- 高度(海拔值)
- R值(紅色成分)
- G值(綠色成分)
- B值(藍色成分)
每行中包含的資訊的類型和順序會由於3D雷射掃描器的類型和測量資料的處理而有所不同。可能包含6個項目以外的資料,或者每一列的順序可能不同。 對於文本格式的資料,如果不檢查哪個資訊在哪一列中並進行設置的話,這些點將被放置在不同的位置,或者色彩強度參數將無法正確顯示。
設置完每個資訊後,關閉“設置”介面,並從點雲建模外掛程式介面左上方的“打開檔案”中載入任何點雲。 可以選擇多個檔案進行讀取。 對於LAS檔案,無需設置格式即可讀取。
2. 點雲的顏色設定
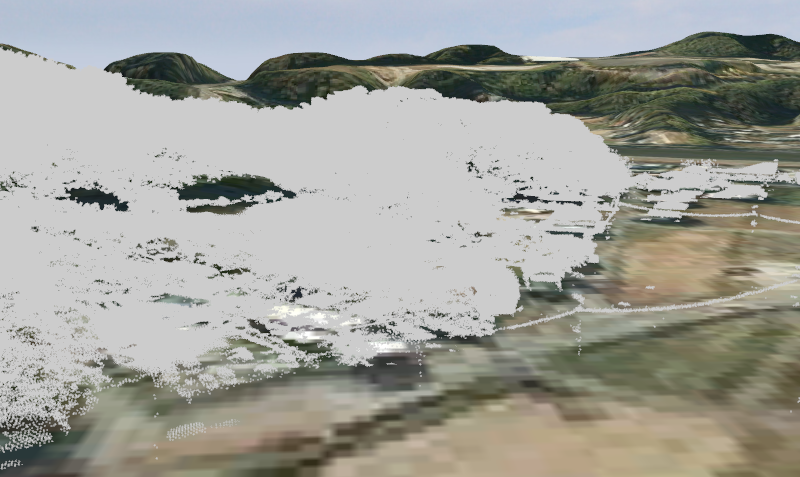
讀取的點雲沒有顯示顏色時,可能是因為資料的顏色資訊超過色彩強度參數的規定值範圍。如果資料中包含RGB資訊,並且正確設置列的位子,也將最大值設為255後,仍無法顯示顏色時,請輸入參數的最大值65535,並再次讀取資料以確認是否顯示正確的顏色。 如果顯示的亮度資訊資料(不是RGB)偏向於極端白色或黑色,請嘗試以相同方式更改參數的最大值。
| 色彩強度參數最大値255 |
色彩強度參數最大値65536 |
 |
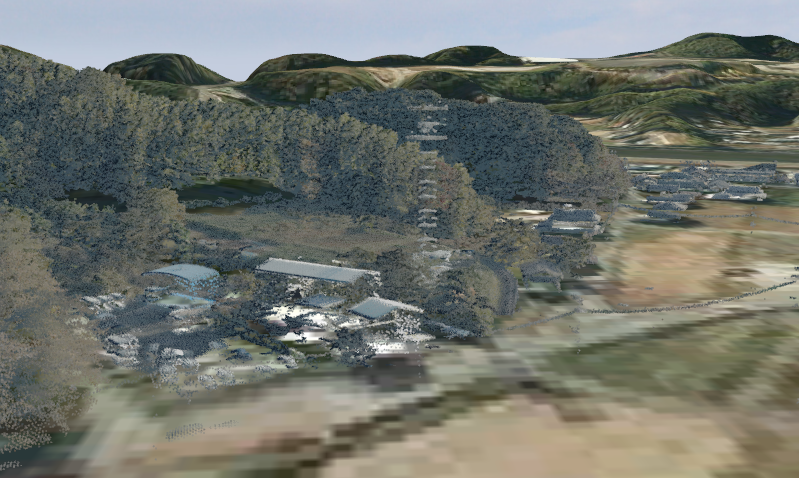 |
| 圖4 色彩強度參數*1 |
|
3. 點雲LOD
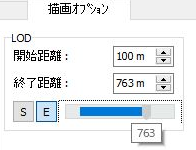
固定式導入的點雲資料可以進行LOD設置。 在“點雲建模外掛程式”介面的“圖形選項”選項裡有“LOD”設置選項。 可以透過輸入起點和終點距離的數值或移動滾輪來調整顯示點雲的範圍。 使用橫條圖進行設置時,可以按一下“S”調整起始距離,按一下“E”調整終止距離。
如果讀取大量點雲資料導致系統變慢,可以設置點雲LOD來減緩系統負擔。 因為MMS格式的點雲是線性提取,所以LOD目前不適用於此,但是如果是不需要使用MMS格式的情況時,可以將點雲格式更改為“固定式”,然後重新載入並設置LOD。
|
 |
| 圖5 LOD設置 |
|
| LOD S:50 E:200 |
LOD S:50 E:999 |
.jpg) |
.jpg) |
| 圖6 LOD比較*2 |
4. 可以右鍵點擊點雲資料的便捷功能
“點雲建模外掛程式”介面的“點雲”選項清單中,選擇點雲後右鍵點擊可以顯示功能表。
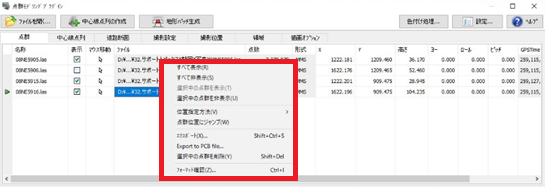 |
| 圖7 右鍵點擊選單 |
- 切換單次顯示/隱藏多個點雲
可以透過“顯示”核取方塊選擇顯示或隱藏點雲,但是由於只能一一設置。因此如果設置的量較多時,需要花費時間和精力。 在這種情況下,可以透過右鍵選擇多個點雲來選擇“顯示/隱藏選定的點雲”。
- 移動到任意點雲位置
讀取大量點雲資料時,需要花費一些時間來瞭解哪個點雲在哪個位置。 在這種情況下,按右鍵選定任何點雲,然後選擇“跳到點雲位置”。 介面位置將切換到相應點雲的位置。 視點移動後,可以立即查看。
- 確認點雲格式
讀取點雲時可以進行單獨的設置,但是如果您想知道使用哪個設置讀取了哪個點雲,請選擇目標點雲並按一下滑鼠右鍵。 從底部的“檢查格式”讀取時,可以檢查設置。
- 匯出
可以輸出並保存所選的點雲檔案。 可以在“設置”的“匯出”選項卡上指定匯出設置。
5. 生成地形補丁
透過選擇“點雲建模外掛程式”介面頂部的“地形補丁生成”,可以將點雲資料轉換為地形補丁。可以設置稀疏點的間隔並指定資料範圍。
| 生成點雲範圍地形補丁 |
不顯示生成地形補丁後的點雲 |
 |
 |
| 圖8 生成地形補丁*1 |
開源資料應用
在UC-win/Road上,可以讀取並根據需要使用開源的點雲資料。 以下是一些免費公開點雲資料的網站。
・Shizuoka Point Cloud DB(靜岡縣點雲資料庫)
https://pointcloud.pref.shizuoka.jp/
可以下載在靜岡縣內建設期間所測量到的點雲資料。 在讀取了河津七瀧的環狀大橋點雲資料後,即可以創建一條道路進行駕駛模擬。
 |
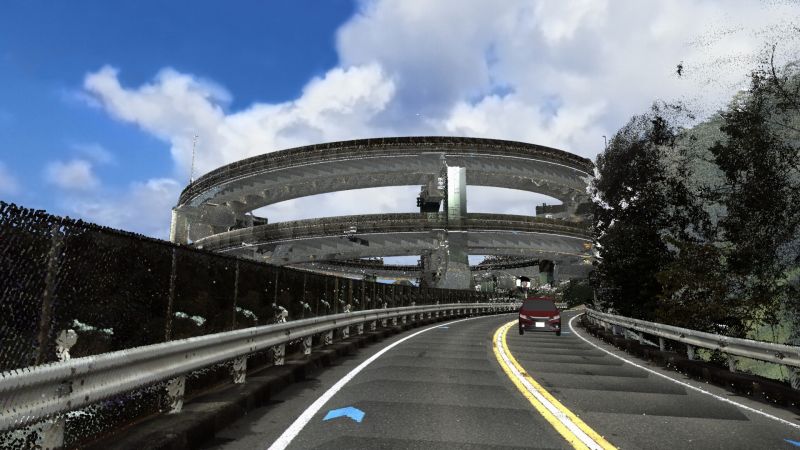 |
| 圖9 河津七瀧的環狀大橋點雲數據體驗*2 |
・工業技術研究所、資訊與人機工程學研究中心、地理資訊科學研究團隊
https://www.airc.aist.go.jp/gsrt/3ddb-viewer.html
可以透過各種測量方法瀏覽和下載點雲資料,例如東京/御台場和茨城縣的筑波中心等。
 |
 |
| 圖10 東京都御台場資料*3 |
以下網站上登錄了來自日本各地的點雲資料。 還可以下載靜岡縣和兵庫縣的數據。
・國土交通資料平台 https://www.mlit-data.jp/platform/
・G空間資料中心 https://www.geospatial.jp/gp_front/
隨著開源資料的公開,點雲已經變得比以前更加貼近生活,請利用好這次機會多加體驗。
點雲數據出處
- 社會基礎設施資訊流通促進會(AIGID)
G空間資訊中心“靜岡縣東南富士山/伊豆東部景 點雲數據”
(https://www.geospatial.jp/ckan/dataset/shizuoka-2019-pointcloud/resource/7b986b95-c5a0-4a14-823c-129de28ee2a8)
- 靜岡縣點雲資料庫
https://pointcloud.pref.shizuoka.jp/
- 產業技術綜合研究所
3DDB Viewer (https://www.geospatial.jp/ckan/dataset/shizuoka-2019-pointcloud/resource/7b986b95-c5a0-4a14-823c-129de28ee2a8)「MMS點雲(御台場多尺度3D資料維護和位置精準度評估(191),移動LIDAR點雲(御台場多尺度3D資料維護和位置精準度評估)”(194)




