

UC-win/Road には豊富な交通シミュレーション機能があります。今回は交通流に関連した少し高度な設定や制御方法を紹介します。
車線ごとの交通量や速度の変更
UC-win/Roadでの交通量は、道路に対して1時間あたりの発生台数で指定しますが、道路単位だけでなく車線ごとにも交通量や速度、交通プロファイル(車種構成)を設定できます。この設定により、例えば車線ごとの混雑の違いやバスレーンの表現、あるいは高速道路の走行車線にはトラックを多く走行させ、追越車線と速度差をつけるといった、それぞれの道路の状況に合わせた交通状況を再現することができます。
設定するには、メニュー「編集」タブ-「交通」の項目の「生成」をクリックして「交通流の登録」画面を開きます。

図1 交通流の生成
対象の交通流を選択して「編集」をクリックし、「交通流の編集」画面を開きます。[+]をクリックして車線を展開すると、車線ごとに交通量、初期速度、プロファイルを設定することができます。
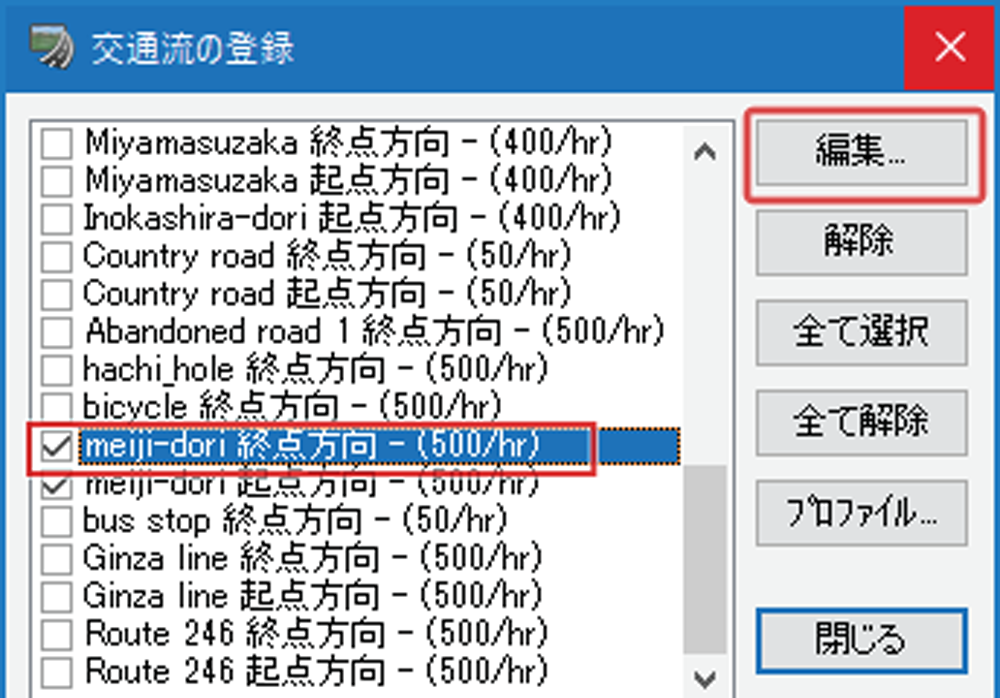
図2 点群読み込み設定画面

図3 交通流の編集
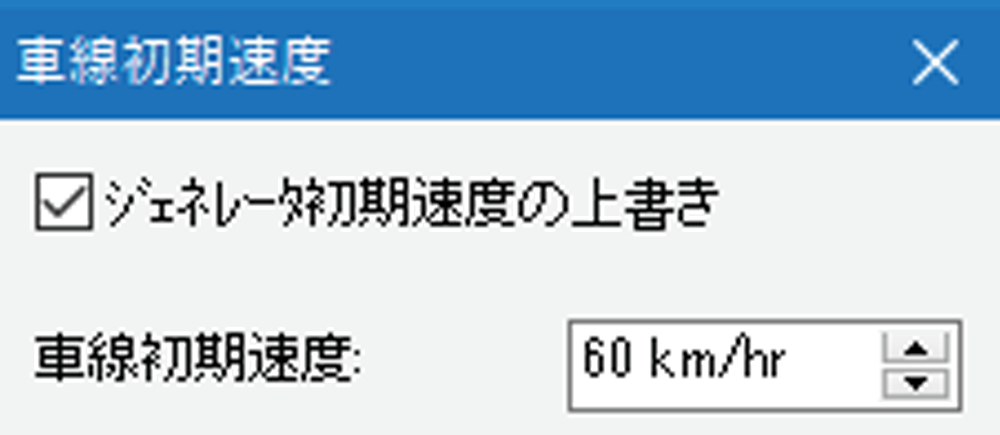
図4 車線初期速度
特定の車両の進行方向を指定する
通常、UC-win/Roadの道路を走行する車両は、交差点や車線分岐地点でどの方向に進むかがランダムに決まり、シミュレーションを繰り返しても同じ車が常に同じ方向に進むわけではありません。決まったルートを自動運転で走行したり、シナリオで発生させた車両を特定のルートで走らせたい場合は、走行車グループを追加することでルートを固定させることができます。
例えば、シナリオで後ろから来た緊急車両が自車を追い越した後、次の交差点で左折する、といったように、この車両は必ずこの方向に進んでほしいという動作を設定することができます。

図5 方向指定
まず、特定車両専用の走行車グループと動作プロファイルを作成します。メニュー「編集」タブ「- 交通」の項目の「車両グループ」をクリックして「走行車グループの編集」画面を開きます。「走行車グループ」の項目で「新規作成」ボタンを押して新しい走行車グループ(画像では緊急自動車)を作成し、「動作プロファイル」は新規作成または他の車種をコピーして、専用のプロファイルを追加します。画像では「救急車」という動作プロファイルを追加しています。
なお、走行車グループの「緊急自動車」を選択した状態で動作プロファイルは「救急車」にのみチェックが入り、他の走行車グループでは「救急車」の動作プロファイルにチェックが入らない状態とします。また、「救急車」のサウンドプロファイルも適宜選択します。

図6 走行車グループの編集
次に、新規作成した動作プロファイルを自動車モデルに割り当てます。制御したい自動車モデルの編集画面を開き、「自動車の設定」タブで、動作プロファイルの設定を新規作成したもの(ここでは救急車)に変更します。乗用車のように同じ車種を複数走らせてその中の1台だけを制御したい場合は、自動車モデルを複写し、ランダムに走るモデルと制御するモデルでプロファイルを区別して使い分けます。
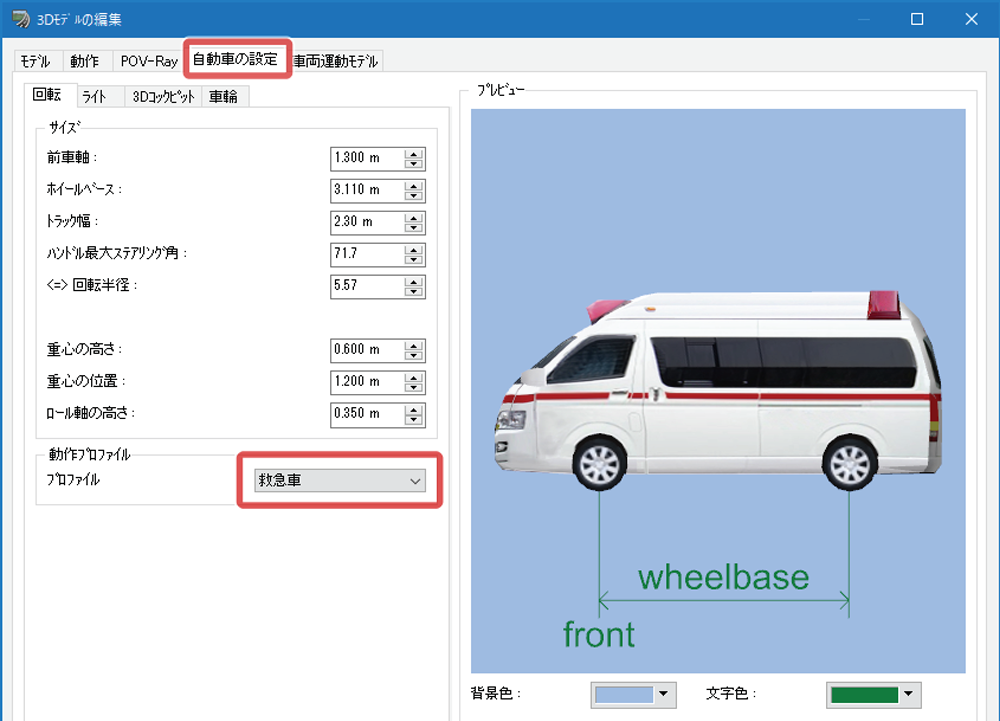
図7 自動車の設定
車両の設定ができたら、次は走行ルートの指定を行います。ルート上の交差点を左クリックした後右クリックして「平面交差の編集」画面を開きます。「走行ルート」タブで走行車グループごとに進行方向を指定できます。「緊急自動車」が必ず左折してほしいときは、画像で示した進入ルートの矢印をクリックして、右の表で「緊急自動車」グループにチェックを入れ、左折方向の重みのみに数値を入れ、他の重みを0にします。このように、1つの欄にのみ重みの数値を入れることで、チェックを入れたプロファイルの車両は特定の方向にしか進まなくなります。

図8 平面交差の編集
常時左折可の交差点の設定
交差点を通行する車両は必ず信号に従うように制御されますが、実際の交差点には赤信号でも左折できる、いわゆる常時左折可の交差点も存在します。これは、交差点編集画面で特定のルートのみ信号に従わない設定とすることで再現することができます。

図9 常時左折可
設定を行うには、交差点編集画面を道路平面図から開く必要があります。編集画面の「交通コントロール」タブで、左折可とする走行ルートの根元にある進入ポイント(緑色のバー)をクリックしてルートを選択すると、ルートが緑色で表示されます。「選択中の走行ルート」の項目で「上書きする」にチェックを入れ、「制御しない」に切り替えると、このルートを走る車は信号に従わなくなります。また、選択項目で「停止する」を選択すると停止ポイント位置で必ず一時停止し、「道を譲る」を選択すると他の車両が来た場合に必ず道を譲る動きとなります。

図10 平面交差の交通コントロール
ウィンカーの制御
交差点の右左折時のウィンカー点滅はソフトで自動制御されますが、道路構造によってはウィンカーの点滅を変更したい場合があります。例えば画像のような交差点の場合、初期設定では下から進入して右に進む車は右折と認識され、自動的に右ウィンカーを出しますが、この構造の場合は下から右に進むほうが道なりであり直進扱いになるので、ウィンカーを出さないのが正しいです。
このようにウィンカーの動作を初期設定から変更したい場合は、交差点の編集画面で設定ができます。編集画面の「走行ルート」タブで、変更する走行ルートの根元にある進入ポイント(緑色の矢印)をクリックし、右側の「方向」タブで進出ポイントの方向を変更します。この場合、右に進むルートが初期設定では「右」となっているため、「直進」に変更します。これで、下から右へ進む車はウィンカーを出さなくなります。
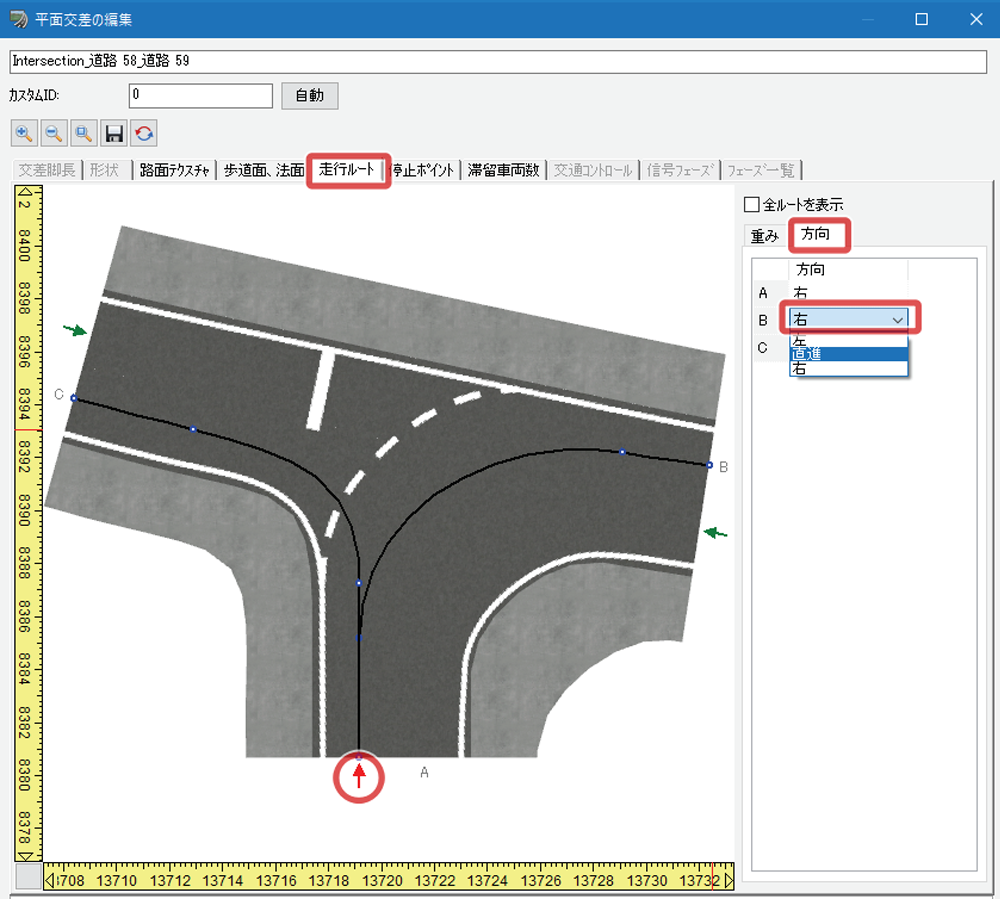
図11 走行ルートの方向
また、シナリオで特定の車両のウィンカーを制御することもでき、「イベントの編集」の「モデル制御」タブで設定することができます。対象モデルを選択し、右側の「ウィンカーを切り替える」の項目で点滅のパターンや制御時間を指定します。
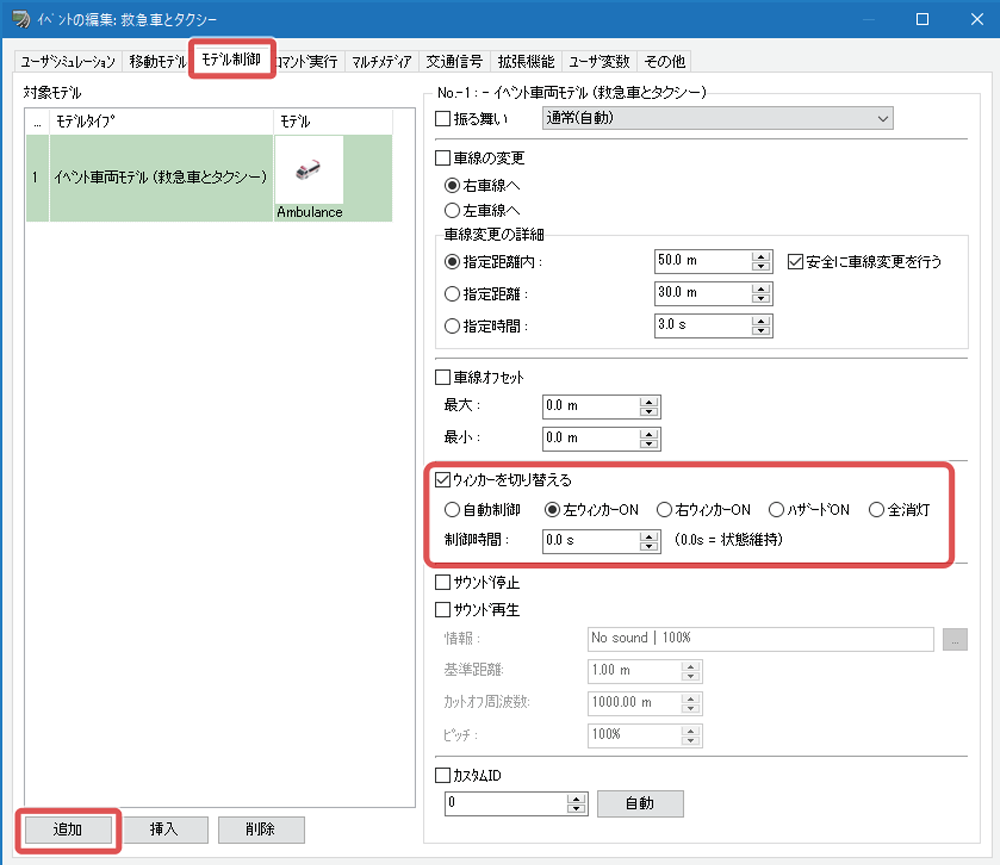
図12 モデル制御
Ver.14.2での運転可能範囲設定
Ver.14.2より、車両運転時に車線をはみ出して走行する設定が可能となっています。従来、対向車線にはみ出すような運転をする場合は特殊な道路断面を作成していましたが、Ver.14.2では特殊な構造とすることなく対向車線にはみ出す運転が可能です。

図13 はみ出し
メニュー「ファイル」-「プロジェクトオプション」の「シミュレーション」タブで、「自車両の対向車線の走行を許可する」にチェックを入れることで、道路の途中で対向車線にはみ出すことが可能となります。
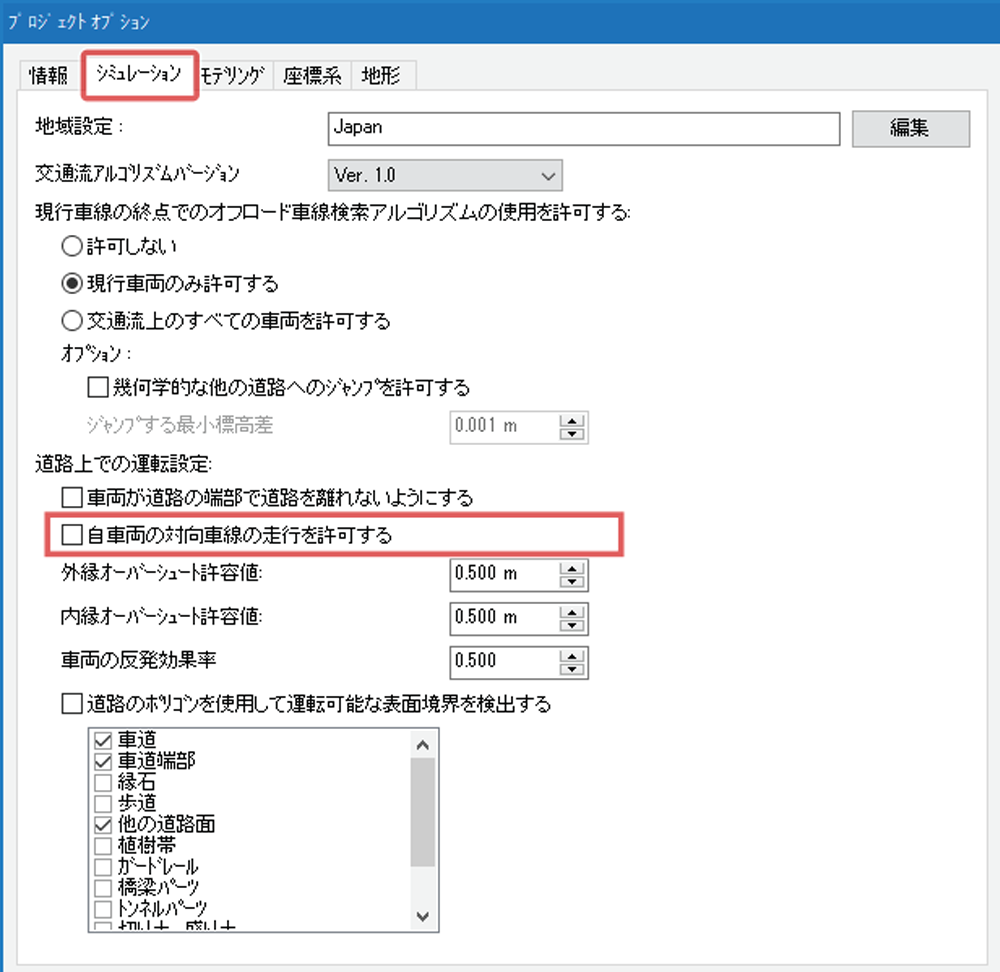
図14 プロジェクトオプション
UC-win/Roadの交通流は今後も改善を続けてまいりますので、ぜひご活用ください。
(Up&Coming '21 新年号掲載)




