| Sản phẩm & dịch vụ mới | Mô phỏng | ||
●Giá niêm yếtPhiên bản Ultimate: USD 17,200 ●Phát hành (dự kiến)Tháng 2 năm 2022 |
|||
Hỗ trợ import file ASAM OpenDRIVE
Phiên bản UC-win/Road Ver. 16.0 được trang bị tính năng import và export file ASAM OpenDRIVE®.
ASAM OpenDRIVE® là tiêu chuẩn quốc tế về mạng lưới đường (road network) có độ chính xác cao, được ASAM (Association for Standardization of Automation and Measuring Systems - Hiệp hội tiêu chuẩn hóa hệ thống đo lường và tự động hóa) phát triển phục vụ cho mục đích nghiên cứu về xe tự hành.
Dữ liệu lưu trong file OpenDRIVE® gồm thông tin hình học của đối tượng trên đường, gồm hệ thống đường, làn xe, biển báo giao thông, và các thuộc tính khác trên đường như tín hiệu giao thông.
Mục tiêu của OpenDRIVE® là cung cấp dữ liệu mạng lưới đường dùng cho mô phỏng nhằm kiểm định các tính năng tự hành (AD) và hệ thống hỗ trợ lái xe tự hành (ADAS) trong quá trình phát triển hệ thống. OpenDRIVE® cho phép trao đổi dữ liệu mạng lưới đường giữa các hệ thống mô phỏng khác nhau, giúp giảm chi phí, thời gian tạo và chuyển đổi dữ liệu.
UC-win/Road Ver. 16.0 hỗ trợ trao đổi dữ liệu mạng lưới đường gồm thông tin về đường và làn xe với phần mềm bên thứ 3 thông qua OpenDRIVE® để giảm chi phí thực hiện mô phỏng.
Khi dữ liệu hệ thống đường tạo từ phần mềm bên thứ 3 được import vào UC-win/Road thông qua OpenDRIVE®, người dùng có thể thực hiện mô phỏng lái xe trên UC-win/Road. Ngoài ra, người dùng cũng có thể export mạng lưới đường qua OpenDRIVE® để sử dụng dữ liệu đó trong mô phỏng của các phần mềm khác.
Những năm gần đây, việc sử dụng các bản đồ có độ chính xác cao để phát triển và kiểm định các tính năng tự hành (ADAS và AD) đang trở nên thiết yếu. Trong tương lai, chúng tôi sẽ phát triển, cải thiện hơn nữa tính năng export dữ liệu OpenDRIVE® và tính năng mô phỏng, qua đó giúp UC-win/Road trở nên hữu ích hơn đối với các kỹ sư.
 |
 |
 |
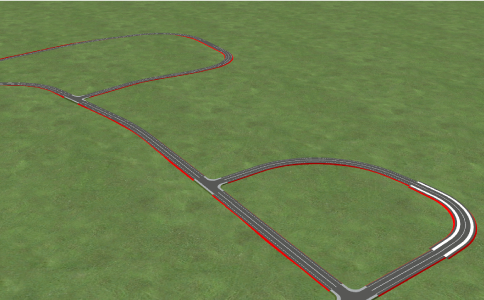 |
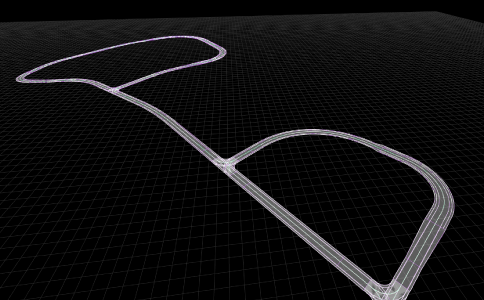
| Hình 1. Dữ liệu OpenDRIVE® xem từ trình viewer (cột ảnh trái), và dữ liệu sau khi được import vào UC-win/Road (ảnh phải) | |
Cải thiện tính năng về cụm máy trạm (cluster)
Các nghiên cứu và phát triển xe tự hành, công nghệ ADAS và an toàn giao thông đều yêu cầu mô phỏng các phương tiện, người đi bộ và điều kiện giao thông xung quanh phương tiện. Tuy nhiên, rất khó để mô phỏng các hành vi đặc biệt của con người, phản ứng bất ngờ, hay các chuyển động nhỏ và chi tiết. Vì vậy, UC-win/Road từ lâu đã cung cấp tùy chọn liên kết cụm máy chủ (cluster) cho phép nhiều người dùng tham gia vào không gian ảo mô phỏng. Theo đó, kịch bản (scenario) cho phương tiện chính được tạo trong UC-win/Road, và những người dùng khác có thể tham gia điều khiển các phương tiện, xe đạp và người đi bộ xung quanh phương tiện chính.
Việc cải thiện tính năng này trong phiên bản mới cấp quyền riêng cho những người dùng cùng tham gia vào không gian mô phỏng, cho phép kiểm soát từng kịch bản (scenario). Đồng thời, để đảm bảo tính nhất quán của toàn bộ quá trình mô phỏng, mô phỏng về môi trường được chia sẻ chung cho tất cả người dùng; ngoài ra, thời gian các sự kiện xảy ra đối với mỗi người dùng và thông tin được hiển thị (giọng nói, nội dung hiển thị trên màn hình HUD, v.v.) được điều khiển riêng lẻ.
Một số ví dụ về ứng dụng của tính năng này bao gồm:
- Với một kịch bản (scenario) có nhiều người dùng đang mô phỏng lái xe trong cùng một môi trường và có tương tác, tác động lẫn nhau, chương trình cho phép điều khiển để các hướng dẫn, cảnh báo, v.v. hiển thị riêng biệt đến từng người dùng.
- Khi nghiên cứu tương tác giữa xe cấp cứu và các phương tiện khác, người dùng có thể tạo ra các kịch bản có chung điều kiện giao thông, và đồng thời chạy các kịch bản riêng biệt gồm nhiều sự kiện (event) khác nhau xảy ra đối với mỗi hành khách trên xe.
- Trong các mô phỏng thực hiện các tác vụ liên động với mô phỏng hoạt động máy móc xây dựng/ máy móc hạng nặng, chương trình có thể hiển thị thông tin cho từng người lái xe tùy theo tình trạng của mỗi người họ, cũng như tạo ra các kịch bản có sự kiện xảy ra dựa trên kết quả cộng tác trong công việc.
 |
| Hình 2. Màn hình hiển thị của lái xe 1 (trái), của lái xe 2 (phải) |
Cập nhật cho các tính năng cơ bản
●Khả năng tùy biến phím chức năng trên bàn phím
Người dùng có thể tự do thiết lập chức năng cho các phím trên bàn phím sử dụng cho các thao tác như điều khiển camera (góc nhìn), mô phỏng lái xe, bay, đi bộ và các thao tác di chuyển khác trên màn hình chính. Người dùng cũng có thể bỏ gán chức năng thao tác cho các phím tương ứng đối với các lệnh ít sử dụng.
●Mô phỏng điều kiện thời tiết thay đổi liên tục
Khi bật/ tắt hoặc thay đổi thông số các điều kiện thời tiết như mưa, tuyết, gió, sương mù, v.v., giá trị thông số sẽ dần thay đổi đến khi đạt đến giá trị thiết lập. Người dùng cũng có thể cho giá trị thông số thay đổi ngay tức thì như các phiên bản trước đây, và có thể đặt thời gian cần thiết cho quá trình thay đổi.
Khi trình bày dự án, sự thay đổi của thời tiết được mô phỏng mượt và đẹp mắt hơn, cải thiện đồ họa của dự án. Ngoài ra, mô phỏng thời tiết có thể biểu diễn hiện tượng mưa to dần và hiện tượng sương mù dày đặc một cách chân thực hơn.
●Cải thiện hiệu năng kết xuất đồ họa
Phiên bản mới sử dụng environment mapping cho phép biểu diễn phản chiếu của môi trường xung quanh lên các phương tiện giao thông, đồng thời ánh sáng được phản chiếu trên các đa giác mờ (translucent polygon) trong điều kiện ban đêm, đem lại khả năng diễn họa chân thực hơn.
| (Up&Coming '22 Ấn bản năm mới) |
|
|

