UC-win/Road的下一个主要版本升级,加强了利用开放数据的能力,并增加了支持构建模拟环境的功能。 主要的修订内容在此说明。
CityGML数据输出功能
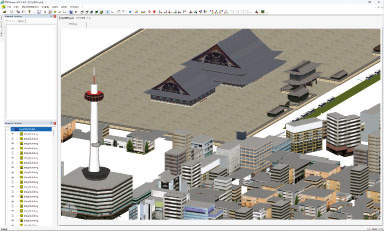
在日本国土交通省推进的PLATEAU项目中,正在建立日本城市的3D城市模型。UC-win/Road一直致力于导入这些城市模型,Ver.15改进了导入功能,可以批量导入具有全局坐标的3DS和FBX格式的模型。Ver.16增加了直接导入城市模型的国际标准格式CityGML格式的功能,并支持导入所有公布的城市模型数据。UC-win/Road 17更进一步,增加了以CityGML格式输出的功能。其目的在于将UC-win/Road作为创建和编辑城市模型以及从UC-win/Road输出城市模型的平台使用。
 |
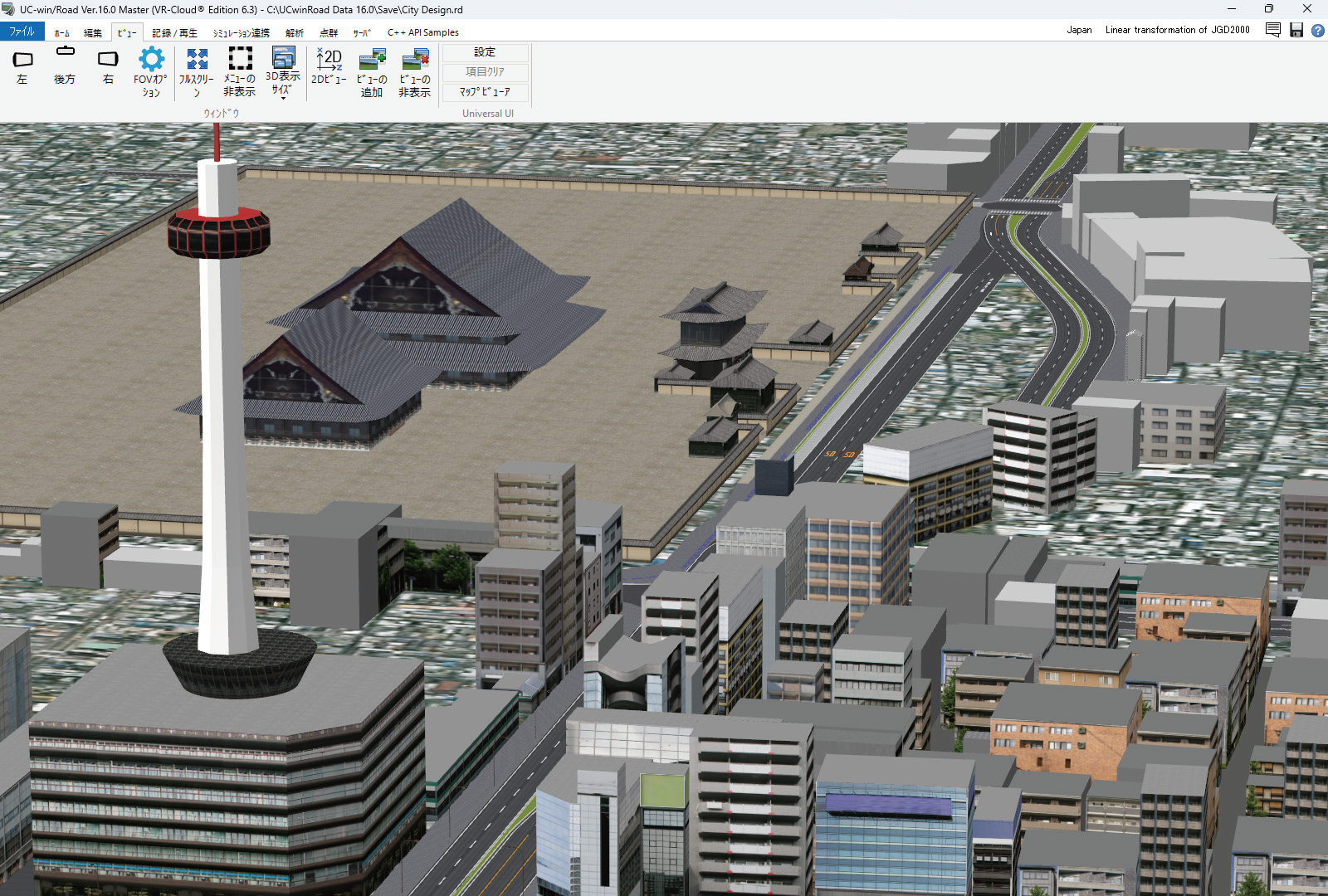
| 图1 UC-win/Road的城市模型数据 |
 |
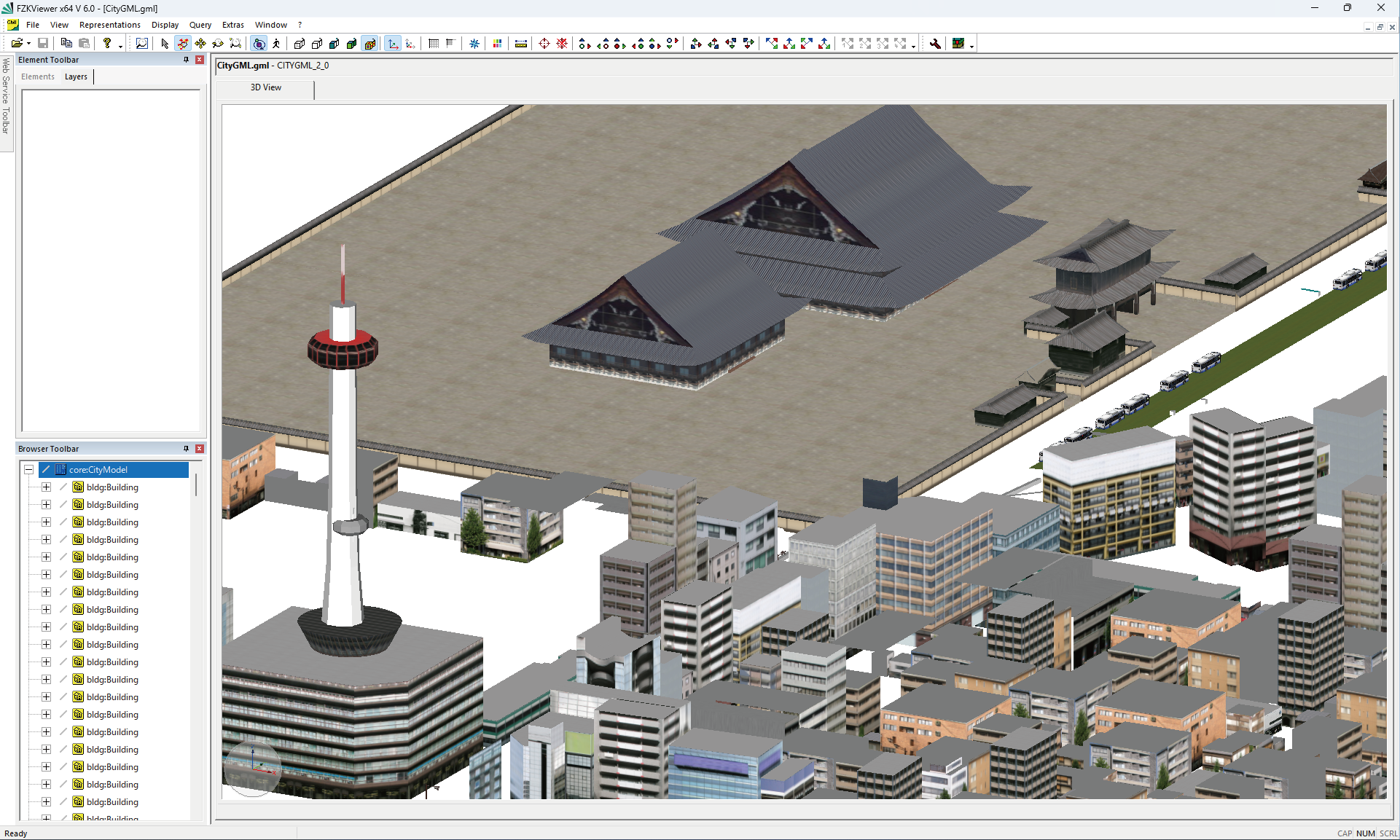
| 图2 UC-win/Road输出的CityGML在查看器中的显示示例 |
UC-win/Road的输出将包括LOD1-2建筑模型和LOD1级道路和地形模型,以便在PLATEAU三维城市建模标准操作程序的基本集合中实现输出、 建筑物的LOD1模型将是带有挤出的建筑物轮廓的无纹理模型表示,而建筑物的LOD2模型将是建筑物的纹理表示。
当PLATEAU的CityGML被读入时,可以将CityGML数据与它所包含的信息一起重新输出,除了被改变的部分,原始信息会被尽可能地复制和输出。 此外,如果使用Shade3D或其他软件将建筑模型创建为实体形状,就可以将其作为实体形状输出到CityGML数据。
支持浸水导航数据的导入
海啸插件新追加了从日本国土交通省的浸水导航中下载浸水数据的功能。UC-win/Road上可以运用浸水导航数据进行浸水的可视化模拟。
使用UC-win/Road的区域功能,将从淹没导航系统下载数据的区域指定为数据采集区域。 数据导入后,可使用海啸插件功能,检查水位随时间的变化,并将梯度可视化,形成水面的真实表现。
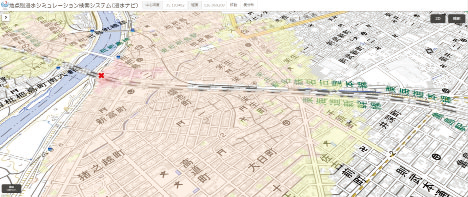 |
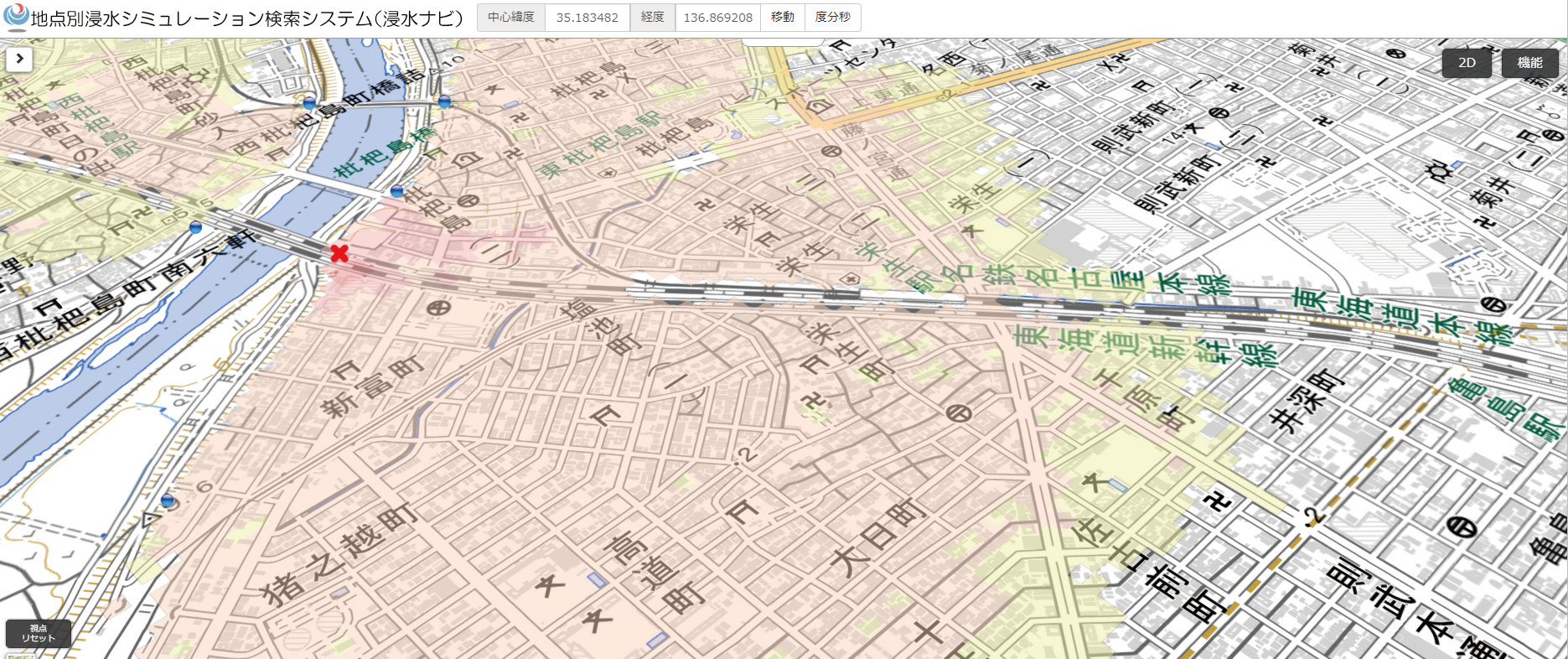
| 图3 UC-win/Road 导入浸水导航数据的模拟示例(上)国土交通省 浸水导航的动画显示(下) |
道路编辑功能的改良
为了提高道路建模效率追加了3个方便的功能。
1.Undo・Redo功能
以前,在平面编辑画面上有一个撤销功能,最多可以撤销一次以前的操作,但现在已经改进为最多可以撤销10次操作。此外,以前不可能的恢复编辑操作也以同样的方式实现了。这个撤销操作的数量可以在应用程序选项设置中改变。默认设置是10次,但可以根据客户的应用和内存情况适当调整。撤销/重做功能在平面编辑屏幕中提高了粒度,也可以在纵断面编辑画面、道路断面编辑画面和地形修补数据编辑画面中使用。
2.能够保存和读取道路概况。
平面编辑界面中新增了道路线形的导出/导入和复制/粘贴功能。 与线形一起保存的还有用于线形的道路横截面和路面纹理,这样就可以精确再现道路的几何形状和材料。 此外,还可以选择并保存和导入多条道路,包括 ON 和 OFF 斜坡道路。
通过剪贴板处理复制和粘贴,这对于启动两个或多个 UC-win/Road 应用程序并整合多个项目数据的任务非常有效。 否则,导出的道路线形数据可与多个数据创建者共享,并根据需要导入,以提高数据创建效率。 道路数据会被分配一个唯一的ID,当导出的道路被导入到同一项目中时,可选择保留或覆盖原始道路进行合并。 此外,纵向线形编辑屏幕中还提供保存和加载功能。 该界面包括纵向线形、道路横截面和路面纹理。
3.道路的起点・终点变更功能
增加了在平面编辑屏幕中交换任何道路的起点和终点的功能。 例如,如果您创建了一条道路线形,然后发现单向方向颠倒并试图纠正,这就非常有用。 在此之前,需要删除该路线,然后在相反方向添加 IP 点。 此外,当该功能应用于道路上已创建道路附属物、隧道和桥梁的道路时,它可以保留它们之间的位置关系。 道路附属物、隧道路段、桥梁路段等在路线中的位置将参照原始终点进行更新,因此道路的外观不会改变。
LKA功能
LKA 是 Lane Keeping Assist(车道保持辅助系统)的缩写,在日语中被称为车道偏离预防系统。 在实际车辆中,LKA识别车道的白线,当车辆偏离白线时,会发出警报声或对方向盘施加旋转力,试图使车辆回到车道中央。
UC-win/Road 17实现了表示这种LKA运动的功能,使UC-win/Road能够计算车道偏离量,并根据该偏离量和速度计算施加在方向盘上的力和方向盘修正量。 方向盘上的反作用力将反映在支持力反馈的游戏控制器上,并与支持扭矩控制的各种驾驶模拟器硬件兼容。 当车辆偏离车道时,还可以播放设定的警告声。 如果该功能与外部系统连接,就可以实时获取该功能的计算结果。 这可用于研究和开发与 LKA 功能相关的人机界面和道路安全。
改进速度限制功能
UC-win/Road Ver.17改进了道路的限速功能。 到目前为止,限速是在生成交通流时根据初始速度和移动控制点设定的,但现在可针对各路段设定限速,从而更容易在现实世界中体现各路段的限速设定。 设定的速度限制可以在不同的场景和 API 之间切换。 此外,还可以获取使用中的速度限制信息。 在各种交通状况下进行重复实验和数据分析也很方便。
重放视频录像功能
重放插件选项将进行扩展,包括将驾驶模拟和场景运行等重放记录转换为视频的功能。 可以选择过去录制的多个重放数据(.RR 文件)和现在录制的数据,并一次性将它们全部转换。分辨率、记录视角和转换范围可通过选项设置进行设置。 例如,如果以俯瞰视角创建了一段视频,记录了在某个场景中的某个十字路口右转的场景,则可用于直观检查车辆是否安全行驶,是否注意来往车辆、交通信号灯和行人。
Python API
概要
为支持UC-win/Road的模拟开发,将发布Python API。UC-win/Road迄今为止提供了Delphi SDK、JavaScript集成、C++ API等外部数据集成功能。 Python API是一种API,用于更简单、更高效地与UC-win/Road进行数据集成。
对象机能
它提供与 C++ API 相同的功能,包括驾驶模拟器控制、模型实时控制、主屏幕视角控制、菜单和按钮用户界面控制。
COM
Python API 使用微软的 COM;由于 Python 有一个 COM 库,用户可以轻松地使用 Python API 编程,而无需了解 COM 编程。 由于它是在 COM 中开发的,因此除了 Python 之外,还可以在 C#、JavaScript、MATLAB 等语言中使用。
高效的编程和执行
在Delphi SDK和C++ API中,用户创建插件并将插件加载到UC-win/Road中运行,而Python API允许从UC-win/Road功能区菜单、脚本屏幕和场景事件中运行Python脚本。 Python API是从UC-win/Road功能区菜单、脚本屏幕和场景事件中执行Python脚本的机制。 在对程序进行更改后可立即执行脚本,而无需重新启动 UC-win/Road。 还可从Visual Studio等外部应用程序执行脚本,并将其链接到UC-win/Road。 用户可在熟悉的环境中进行编程和调试,Python还拥有其他各种有用的库,可帮助用户高效创建UC-win/Road集成程序。
其他对应项目
其他支持项目包括增加一项功能,支持使用点云数据创建道路。 特别是,已对编辑屏幕上的输入进行了改进,使其更易于参考点云。 此外,VISSIM 链接功能将支持 VISSIM 2023。
|