|
||||||||||||||||||||
|
|
|||||||||||||||||||




|
Đại học Hokkaido tự hào với lịch sử hơn 140 năm, vị trí phòng thí nghiệm Mặc dù lượng tuyết rơi năm nay ít hơn so với trung bình các năm, nhưng có một bức tường tuyết dài được tạo thành ở hai bên con đường chính xung quanh ga JR Sapporo vào đầu tháng ba. Gần ga là "Phòng thí nghiệm Kỹ thuật giao thông và di động tiên tiến (Hagiwara)", nó nằm trong khuôn viên trường đại học Hokkaido, nơi chúng tôi đến thăm. Đại học Hokkaido bắt nguồn từ Trường Cao đẳng Nông nghiệp Sapporo và được thành lập vào năm 1876. Sau hơn 140 năm, Đại học Hokkaido hiện có 12 trường đại học trực thuộc (Khoa Văn thư, Trường Luật, Trường Khoa học, Trường Nha khoa, Khoa Kỹ thuật/Trường Kỹ thuật, Trường Thú y, Khoa Giáo dục/Trường Giáo dục, Trường Kinh tế và Kinh doanh, Trường Y, Trường Khoa học Dược phẩm và Thuốc, Trường Nông nghiệp, Trường Khoa học Thủy sản) và 24 Trường đào tạo sau đại học. Tổng cộng có hơn 18.000 sinh viên các trường đại học và sau đại học đang theo học (tính đến tháng 4 năm 2018) tại 2 cơ sở của Sapporo và Hakodate (2 cơ sở cho giáo dục và nghiên cứu). Trong số đó, Khoa Kỹ thuật sau đại học nơi quản lý Phòng thí nghiệm Hagiwara có 13 bộ môn và 37 nhóm Nghiên cứu. 13 bộ môn bao gồm: Vật lý ứng dụng, Hóa học ứng dụng, Khoa học vật liệu và Kỹ thuật, Kỹ thuật cơ khí và không gian, Hệ thống cơ khí con người và thiết kê, Hệ thống năng lượng và môi trường, Khoa học lượng tử và Kỹ thuật, Kỹ thuật môi trường, Kỹ thuật và Chính sách cho môi trường bền vững, Kiến trúc và Thiết kế kết cấu, Hệ thống môi trường con người, Kỹ thuật môi trường và Kỹ thuật tài nguyên bền vững. Bộ môn Kỹ thuật và Chính sách cho Môi trường Bền vững quản lý các nhóm: Nhóm Nghiên cứu Kỹ thuật cho Hệ thống Cơ sở hạ tầng Bền vững và Nhóm Nghiên cứu Chính sách cho Kỹ thuật và Môi trường. Phòng thí nghiệm Hagiwara được thành lập sau cùng.Mở rộng lĩnh vực nghiên cứu từ hành vi lái xe sang lái xe tự động Dựa trên các nghiên cứu liên quan đến hành vi và khả năng lái xe của tài xế nói riêng, Phòng thí nghiệm Hagiwara đang nghiên cứu và phát triển các lĩnh vực từ quy hoạch giao thông đến kỹ thuật giao thông, khoa học hệ thống an toàn/xã hội và kỹ thuật dân dụng. Ngoài ra, Phòng thí nghiệm cũng nghiên cứu các phương án nhằm ngăn chặn tai nạn giao thông từ các góc độ khác nhau dựa trên môi trường VR. Giáo sư Hagiwara đã nghiên cứu hành vi lái xe từ 30 năm trước, khi ông làm nghiên cứu liên quan đến hành vi của người lái xe cho luận án tiến sĩ. Tiếp theo đó, giáo sư nghiên cứu về "những tình huống người lái xe nhìn thấy, suy nghĩ và đi tới hành động và kết quả xảy ra", với trọng tâm là "tai nạn giao thông do lỗi của người lái xe", đây là lý do gây ra vấn đề. Ông đã nỗ lực nghiên cứu và phát triển các giải pháp cũng như công nghệ để giúp người lái xe không phạm sai lầm. Theo giáo sư, trong những năm gần đây xu hướng lái xe tự động đang phát triển, hiệu suất xe được cải thiện, việc điều khiển một chiếc xe cũng dần dần được chuyển từ người lái sang máy. "Đây là công nghệ sẽ thay đổi nhiều nhất. Các nghiên cứu mới sẽ có xu hướng như thế này (như đã đề cập ở phần mở đầu)." Đó là câu nói của giáo sư 5 năm trước khi ông đưa lái xe tự động vào các đối tượng nghiên cứu của mình. Kể từ đó, lái xe tự động trở thành chủ đề chính được ưu tiên hàng đầu, giáo sư đã tìm hiểu về "những gì nên làm" từ quan điểm xây dựng cơ sở hạ tầng đường bộ, thay vì từ quan điểm phía hệ thống lái xe tự động, liên quan hành vi lái xe. Hai nghiên cứu gần đây nhất của Giáo sư Hagiwara đã nhận được tài trợ từ dự án "Nghiên cứu và phát triển công nghệ năm 2017 góp phần cải thiện chất lượng chính sách đường bộ" của Cục Đường bộ, MLIT. Một trong số đó là "Nghiên cứu và phát triển về hệ đèn chiếu sáng trong khu vực đô thị" để giảm thiểu tai nạn giao thông (đại diện nghiên cứu: Giáo sư Hagiwara, giai đoạn nghiên cứu: 3 năm từ năm 2016-2018). Nghiên cứu tập trung vào giải pháp cho phép người lái xe phát hiện ra một người đi bộ băng qua đường vào ban đêm để ngăn ngừa tai nạn. Trong nghiên cứu này, "Đèn chiếu ra ánh sáng hình chùm" được áp dụng cho đường phố đô thị, ánh sáng chiếu ra từ đèn sẽ kết hợp với đèn pha ô tô để phát hiện nhanh người đi bộ băng qua đường . Một nghiên cứu khác là "Nghiên cứu và phát triển các chính sách giao thông đường bộ mới để hỗ trợ các không gian sản xuất sử dụng lái xe tự động và Michinoeki (trạm nghỉ)", tương ứng với vấn đề đặt ra cụ thể ("Cơ sở hạ tầng đường bộ là cần thiết cho một xã hội lái xe tự động") (đại diện nghiên cứu: Mikiharu Arimura , Phó giáo sư, Viện Công nghệ Muroran, thời gian nghiên cứu: 3 năm từ năm 2017 đến 2019). Nghiên cứu tập trung vào "không gian sản xuất" như nông nghiệp, lâm nghiệp, ngư nghiệp và du lịch ở Hokkaido, nơi đây đang tồn tại những khó khăn cho việc duy trì giao thông công cộng và phân phối hàng hóa. Để phát triển môi trường giao thông đường bộ kết hợp trong không gian sản xuất phục vụ đời sống người dân, giáo sư đã nghiên cứu và phát triển các chính sách giao thông đường bộ, bao gồm cả việc đưa vào sử dụng lái xe tự động và Michinoeki. Khi tham gia nghiên cứu, Giáo sư Hagiwara đã áp dụng bộ mô phỏng lái xe UC-win/Road DS. Ngoài ra, giáo sư còn hợp tác với các nhóm bên ngoài trường đại học, bao gồm Cục phát triển khu vực Hokkaido của MLIT, Công ty TNHH East Nippon Expressway (NEXCO East), Công ty TNHH Central Nippon Expressway (NEXCO Central), Công ty TNHH West Nippon Expressway (NEXCO West), Công ty TNHH Nippon Expressway Research Institute (NEXCO RI), Công ty TNHH Honshu-Shikoku Bridge Expressway (HSBE). Họ đã thực hiện các nghiên cứu chung, ví dụ, về loại đèn chiếu sáng cho đường và đường hầm, loại nào dễ nhìn thấy vào ban đêm, vv để xem xét khả năng hiển thị cho người lái xe.
UC-win/Road DS đã thành công trong việc kiểm tra hành vi người lái xe vào mùa đông sử dụng ACC Cách đây 5 năm trước, Giáo sư Hagiwara đã bắt đầu nghiên cứu về lái xe tự động, cách tiếp cận cho nghiên cứu cũng tương tự như trước đây, ông đo lường và đánh giá hành vi của lái xe trong lĩnh vực này. Tuy nhiên, khi tham gia nghiên cứu và phát triển công nghệ do Cục Đường bộ, MLIT tổ chức năm 2017: "Nghiên cứu và phát triển về chính sách giao thông đường bộ mới để hỗ trợ các không gian sản xuất sử dụng lái xe tự động và Michinoeki (trạm nghỉ)", giáo sư đã sử dụng công nghệ VR. Từ lợi ích của VR, giáo sư đề cập đến 2 điểm: 1) Khi phương tiện thực tế di chuyển trên các cánh đồng, không thể thiết lập các điều kiện thí nghiệm giống nhau. Trong khi đó, VR có thể tái hiện các điều kiện thử nghiệm giống nhau và có chế độ lái xe tự động, nên chúng ta có thể so sánh trong cùng điều kiện; 2) Ngay cả khi có một tình huống va chạm xảy ra trong VR, thì cũng không có sự nguy hiểm thực tế nào xảy ra. "(Trong nghiên cứu này) chúng tôi đã áp dụng nó vào điều kiện mùa đông (tức là thực hiện các thí nghiệm trong môi trường đường bộ khi mùa đông đến, sẽ có một vài yếu tố gây khó khăn cho việc lái xe, ví dụ, mặt đường bị đóng băng và tầm nhìn kém), vì vậy, chúng tôi đã quyết định sử dụng VR vì khó có thể tạo ra tình trạng tương tự ngoài thực tế, ví dụ: "bánh xe trượt trên mặt đường" (ngoài thực tế).
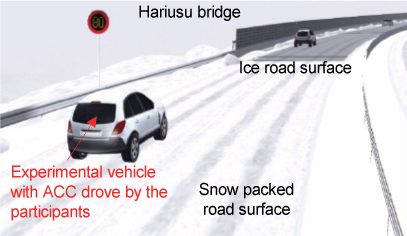
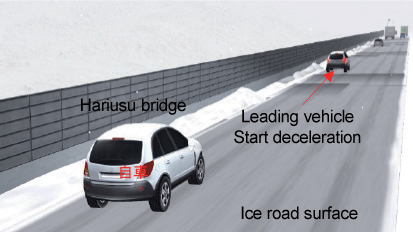
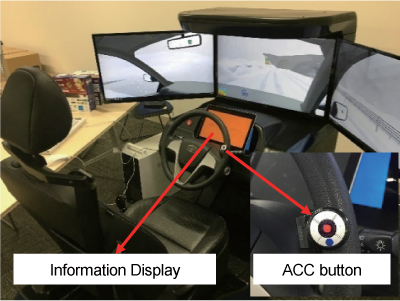
Thứ nhất, liên quan đến hoạt động của hệ thống lái xe tự động trong môi trường đường bộ vào mùa đông, Giáo sư Hagiwara nêu ra vai trò của mép đường: "nó có thể đưa lại các rủi ro không thể phát hiện được bằng hệ thống cảm biến trong hệ thống lái xe tự động như mặt đường bị hỏng hoặc tầm nhìn phía trước bị hạn chế ". Nghiên cứu này "cung cấp thông tin cho những người lái xe đang sử dụng chức năng Điều khiển hành trình thích ứng (ACC) trên đường cao tốc vào mùa đông để tránh những rủi ro do mặt đường trơn trượt (đường thấp phía trước)". Giáo sư đánh giá được sự khác biệt giữa 1) lái xe sau khi cung cấp cho tài xế thông tin về đường thấp phía trước và 2) lái xe sau khi cung cấp cho tài xế cả thông tin về đường thấp phía trước và các biện pháp để đối phó với nó. Các thí nghiệm sử dụng DS đã được kết hợp do không thể tái tạo các tình huống như vậy trên đường thực tế. Trong năm tài chính đầu tiên trong 3 năm của giai đoạn nghiên cứu (năm 2017), 48 sinh viên của trường đại học tham gia nghiên cứu và thực hiện các thí nghiệm trên. Mặt khác, kết quả các thí nghiệm thực địa của một dự án khác mà họ làm việc riêng cho thấy ảnh hưởng của vấn đề trượt trên mặt đường và cả sự liên kết với mặt đường là đáng lo ngại. Do đó, trong năm thứ hai (năm 2018), các tình huống được thay đổi về mức độ so với năm trước, các yếu tố của tuyến đường được thêm vào thiết kế. 32 sinh viên đã tham gia và tiến hành thí nghiệm tương tự.
Năm cuối cùng của nghiên cứu và kế hoạch sử dụng VR trong tương lai "Thật dễ dàng để tạo ra một con đường trong UC-win/Road VR. Chỉ mất một thời gian ngắn để tạo ra một con đường giống với con đường thực tế." Để đưa VR vào sử dụng trong các thí nghiệm, phòng thí nghiệm đã sử dụng UC-win/Road tạo dữ liệu địa hình sát môi trường thử nghiệm. Nhân viên FORUM8 tham gia hỗ trợ bất cứ khi nào khách hàng cần bằng cách sửa đổi kịch bản hoặc tùy chỉnh chức năng còn thiếu trong UC-win/Road. Trường đại học thực hiện những điều chỉnh cuối cùng cho kịch bản thí nghiệm. Thông qua quá trình đó, giáo sư nhận ra không chỉ lợi thế của UC-win/Road (hữu ích cho phần lớn công việc), mà còn nhận ra cả những vấn đề của nó. Dựa trên kết quả năm 2018, Giáo sư Hagiwara đang có kế hoạch lặp lại các thí nghiệm vào năm cuối cùng (năm 2019) bằng cách sử dụng VR, thay đổi một chút về hệ thống lái xe tự động. "(Trong nghiên cứu này) chúng tôi đang sử dụng VR để hiểu sự tương tác giữa lái xe tự động và người lái xe. Dựa trên chúng, chúng tôi muốn đi đến tương lai, ví dụ, phát triển một giao diện tốt hơn cho lái xe tự động hoặc cải thiện đường để các trình điều khiển không phạm lỗi." |
|||||||||||||||||||||||||||||||||
| (Viết bởi Takashi Ikeno) (Up&Coming '19 ấn phẩm xuân) |
|||||||||||||||||||||||||||||||||

|
|||||

