通过预测和控制风险,设计人与车的新的相互作用关系
-驱使各种感应器以及DS、通过检查和预测驾驶员状态构筑适当的支援手法-
在现代社会中我们面临着各种各样的风险。包括事故以及灾害、反映了急速发展的信息通信技术(ICT)的便利性与其相反的风险等。
这次介绍的是筑波大学大学院系统信息工学研究科风险工学专科。该研究科对应当今时代的需求将广范围的风险分为4大类。从多种风险的发生至其解决方式对各种问题进行先导性的教育、研究。其中我们关注了稻垣敏之教授以及伊藤诚准教授率领的〈识别系统设计研究室〉的研究题目。即专门针对人与机械的关系。通过利用先进的模拟技术以及感应技术阐明影响人的识别与决定意识的特性,并探寻考虑这些系统的对人的支援方式。
在日本交通事故对策技术的研究开发为重要研究课题,对此该研究室参与有关人的识别系统的研究,将驾驶员与车的接口设定为研究对象。多角度检测、验证、预测驾驶员状态,以设计车辆支援驾驶员的系统为研究目标。通过反复实验得出研究需要对应各种需求并可简单再现各种逼真行驶环境的驾驶模拟器(DS)。由此采用了株式会社 FORUM8的3维实时VR(虚拟现实)基础的四轮实车型〈UC-win/Road驾驶模拟器〉。
我们特别对决定引进DS并申请使用的研究室成员伊藤诚准教授进行了采访。
| ■研究室的定位及其研究对象 |
1973年筑波大学以东京教育大学的迁移为契机作为综合大学迈出了第一步,经36年已发展成为拥有筑波/东京3校区7学群(人文、文化、社会、国际、人类、生命环境、理工、信息、医学)2专科学群(体育、艺术)8大学院研究科(教育、人文社会科学、商务科学、数理物质科学、系统信息工学、生命环境科学、人类综合科学、图书馆信息媒体)的综合性大学。学生包括学部生10,190名、大学院6,556名共16,746名。外国留学生来自101国家/地区共1,527名(2009年4月1日现在)。
其中大学院系统信息工学研究科由经营、政策科学、风险工学、计算机科学、智能功能系统、结构能源专科构成。但是、前2个专科只有博士前期课程、后期课程是社会系统管理专科。但是、前2个专科只有博士前期课程、后期课程是社会系统管理专科。风险工学专科又将现代社会的各种风险分为综合风险管理、网络管理、城市管理、环境/能源管理4大领域。由多个研究室和小组分别对应各个领域。培养具体预测和控制风险的能力,通过理论与应用研究的成果致力于社会贡献以及立足于全球视野的领导能力的发挥。
这次列举的识别系统设计研究室可以定位在学术性的综合管理风险领域。主题为〈设计人与机械的关系〉,其研究范畴为对应各种状况的人类与计算机的协调以及实现其协调的人性化界面。作为实现方法∶①设计人类工作支援系统时考虑人类的识别特性与意思决定。②构筑和解析人意思决定过程中的数理模型、由此预测人类的行为③通过应用DS等的心理学实验改良数理模型、并对基于此的系统设计识别工学进行评价。
过去、大家往往瞩目于高度自动化的人与机械相关的系统及航空机械。但是最近也逐步渗透到汽车领域。另一方面,虽然交通事故死亡人数与高峰期相比有减少倾向,但是事故次数仍处于高水准,对于其对策技术开发的期待逐日增强,今年后者成为了主要的研究对象。
比如,ITS(高度道路交通系统)立意在于将人与道路、车辆用最尖端的ICT连接,解决道路交通问题。对此该研究室当面主要从与人的关系出发研究车辆单体。
| ■自身的研究中侧重点是冲突问题 |
伊藤诚准教授列举一个简单的例子来说明了该研究室的特征。即文部省科学技术振兴调整费(〈独立法人〉科学技术振兴机构)的重要科技解决型研究项目《通过状况/意图理解的风险发现与回避》(2004~2006)。这是由该研究室的稻垣敏之教授为代表由多数大学、研究机关参加的项目。以杜绝交通事故的〈事故连锁〉为目的,开发为回避连锁上流的风险防止驾驶员的怠慢驾驶等潜在不安全状态,即使出现怠慢驾驶也能早期恢复安全驾驶的结构。
在该项目中探讨状况与驾驶员意图间是否存在成为风险的龃龉。在此首先观测行驶中的驾驶员以及外界状态。〈目前为止的系统只注重外界,没有考虑到驾驶员状态〉。但是从驾驶员支援的角度考虑应该根据外界状况在测量、检查、预测驾驶员的知觉、识别、判断、操作等状态的基础上进行正确的支援。即如和预测驾驶员状态成为关键因素。
在〈认识驾驶员状态〉基础上通过所面临的风险大小以及时间〈如何进行支援〉在该研究室也成为了重要课题。支援可以假设为由系统代替驾驶员踩油门等多种多样。在这里有必要考虑为了确保安全系统可以介入到什么程度,进一步这样的功能搭载到车辆后会出现什么情况。也要观测实际上驾驶员是如何感受各种各样的支援并采取什么样的行动。从这样的目的出发该研究室到目前为止利用DS对驾驶员的状态推测以及支援进行了各种确认。
在了驾驶员的状态方面伊藤老师关注的是压力分布感应器。即有负荷压力分布就会变化,可追随驾驶员的姿势变化识别。与使用摄像的脸部图片的方法相比对驾驶员精神上的负担轻、只需配置到驾驶席即可非常简单。对于驾驶员的姿势推测其有效性也有一定认可外,比如还可以应用在使用ACC(车间距离控制)系统行驶时的要踩油门之前的姿势与没有踩油门意识时的姿势上的不同、行驶时的疲劳以及有睡意时的状态推测。<再此意义上distruction(驾驶注意力的降低)状态的很多可以使用压力分布感应检查,目前重点放在提高其精度上。
一方,在支援方法上正在探讨-比如在面临冲突状态下驾驶员的注意力分散到其他方面,系统何时强制刹车的设计问题。在日本作为ASV(先进安全自行车)的基本想法,如果驾驶员没有踩油门的意识,系统就无法介入。但是如果几乎能确定冲突并由此能减轻受害程度时视为例外。但是因为在此期间国外的汽车厂商实现了对低速领域的强制介入,出现了对高速领域的新开发。正在推进为防止驾驶员的过信的理论化以及物理性冲突风险评价。
最终综合这些推测驾驶员的状态设计系统。并为防止驾驶员的过信行为进行有效管理。
 |
||
| ▲筑波大学综合研究楼B栋 | ||
 ▲伊藤诚准教授 |
||
 |
||
| ▲四轮实车型〈UC-win/Road驾驶模拟器〉 | ||
 |
||
 |
||
| ▲UC-win/Road驾驶模拟器研究发表资料 | ||
 |
||
| ▲UC-win/Road教师模拟器研究发表资料 | ||
 |
||
| ▲利用自动驾驶功能表现了保持一定车距的行驶状态 |
| ■利用DS的研究扩展 |
该研究室很早就将DS利用到了实验中。一种是只用于高速公路的定置型系统,另一个是除了高速公路也可用于城市街区的配有动力平台的系统。不管哪一种设置后可立刻使用,这是其优点之一。但是也存在难点,即无法对应日益增强的设定各种位置进行实验的需求。
在这种背景下,伊藤诚准教授关注了我公司的<UC-win/Road驾驶模拟器>,2007年引进了系统。
本人为代表的文部省科学研究费辅助金〈(独立法人)日本学术振兴会〉的研究项目〈基于非拘束建模的冲突防止支援与过信控制接口〉(2006-2008年度)中将前述的压力分布感应搭载到了DS中。接着又在刚刚启动的研究项目〈自然的驾驶状况中的人类-机械双中心多层的冲突回避管理〉(2009-2011年度)中也计划利用该DS。
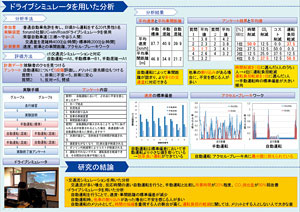
今年上半年,风险工学专业的课程中将〈高速公路中通过引进完全自动驾驶的风险减少效果分析〉研究项目中的三乡收费处~守谷SA间的11.3Km区间由一名学生包括学习约花了一个月时间进行了模型化。基于该数据利用DS进行了分析。
〈就因为利用了该DS系统才能在短时间内制作了路线并正确的再现了地形〉伊藤诚准教授通过一系列利用DS的研究的基础上今年将启动多数研究项目并计划积极应用DS的功能。
非常感谢伊藤教授在百忙之中接受了采访。再次表示感谢。


