| SfM Plug-in has the functions below. Create point cloud from a video
Create point clouds based on the images extracted from photos and videos
taken by a digital camera
Display arrangement of the point crowd
Analyzed and output point clouds can be adjusted to be displayed properly
on UC-win/Road. It is available to rotate and adjust to the actual scale
and positioning. This makes it possible to combine and show plural point
cloud data and lap over VR models and point cloud data.
Caribration file of the camera
By taking the photo of the chess board and entering it, a file is created
to correct the distortion in the image through analyzing the distance
and features.
Create a Visual Words file
Visual Words file is created and output which are used at the time of the
point cloud creation.
|
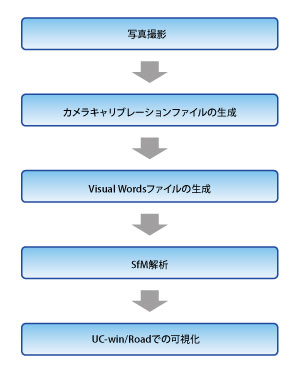
 Fig. 1 Flow of the analysis Fig. 1 Flow of the analysis |
Taking photos
Take photos of the space where you want to create 3D point clouds by digital
camera. Plural photos must be taken from slightly different positions.
In addition, the camera property is necessary as a parameter for SfM analysis.
If the pictures don't have the EXIF information, you need take a photo
of a chess board pattern and create a calibration file.
-Exif (Exchangeable image file format): An image file format that can be
add the information about the shooting conditions to the digital camera
photo data. Metadata such as shooting date, model name, resolution, exposure
time, diaphragm value, focal length, ISO speed, and color space are saved
with the image.
Create a camera calibration file
Create a calibration file which calculates characteristics of the digital
camera by using the photo of the chess board pattern.
Create a Visual Words file
Create a Visual Words file which is needed for the quick judgement of the
similarity ratio during SfM analysis. Photos of the analysis object are
used for the creation. Because it takes an enormous amount of time to create
a Visual Words file, it is recommended that you use sample files originally
attached to the plug-in.
SfM Analysis
Import the photos, the camera calibration file, and the Visual Words file,
assign analysis conditions, and then perform the analysis.
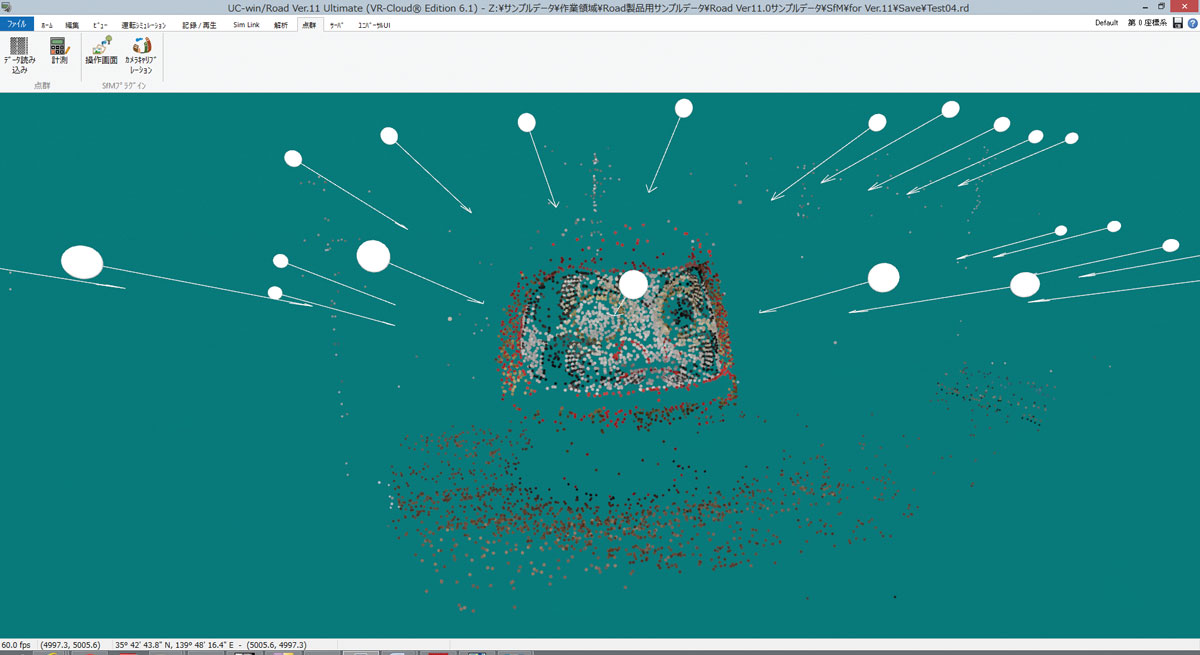
Visualization in UC-win/Road
When the SfM analysis is run, view point positions, direction arrows, and
point clouds are displayed.

Fig. 2 Photo of the showroom |

Fig. 3 Analysis result of the showroom |
|