| Support Topics | |||
| 支援主題・ UC-win/Road | |||
|
|||

|
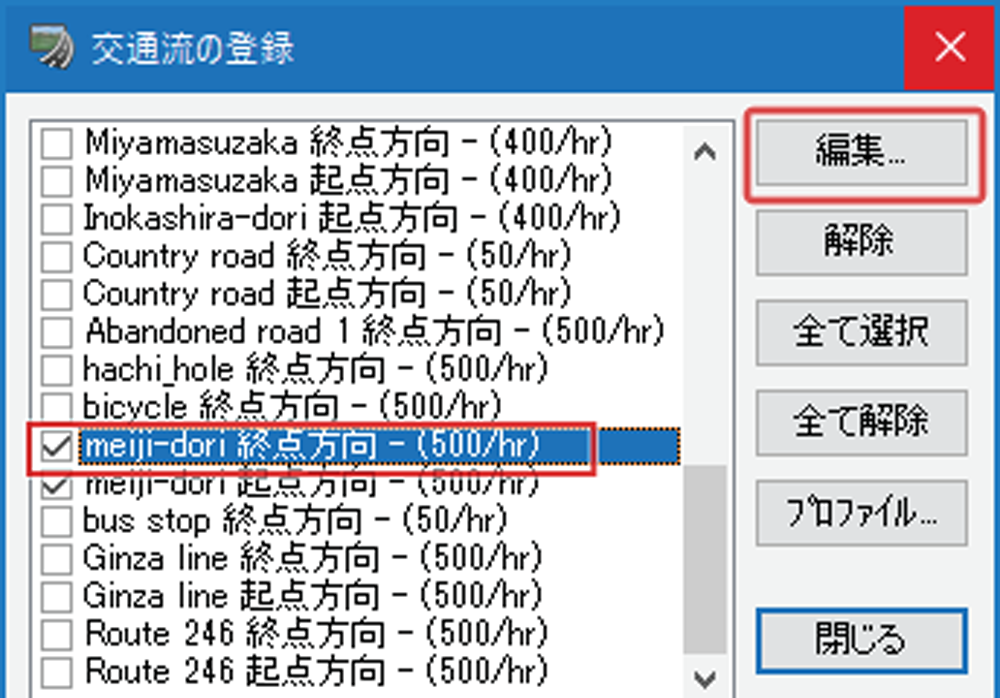
UC-win/Road具有豐富的交通模擬功能。以下我們將介紹與交通流相關的一些進階設置和控制方法。 每個車道的交通量和速度的變化 UC-win/Road中的交通量由道路每小時產生的車輛數量而變化,不僅是每條道路,還可為每條車道設置交通量、速度和交通資訊(車型構成)。透過設置,我們可以根據不同道路的真實情況再現交通狀況,例如每條車道的擁擠差異,公車道的表現或者高速公路中卡車多的車道以及與超車道的速度差。 可以透過點擊功能表“編輯”選項-“交通”選項-“生成”,打開“交通流註冊”介面進行設置。
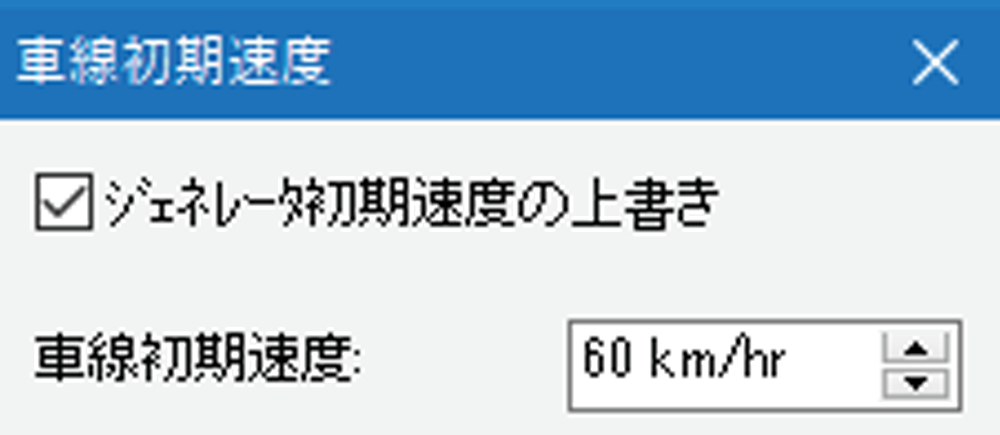
選擇目標交通流,點擊“編輯”,打開“交通流編輯”介面。然後點擊[+],打開車道,可以為每條車道設置交通量、初始速度和詳細資訊。
指定特定車輛的行進方向 通常情況下,在UC-win/Road道路中行駛的車輛,在十字路口或車道分歧點會隨機決定要往哪個方向前進,即使反復模擬,同一輛車也不會一直往同一個方向前進。如果你想讓自動駕駛車輛在特定的路線上行駛,或者想讓場景中出現的車輛在指定的路線上行駛,你可以透過添加行駛車組來固定路線。 例如在場景中,從後面駛來的緊急車輛在超越汽車後,在下一個十字路口左轉,你可以設定這個事件,讓車輛必須朝這個方向前進。
首先,創建特定車輛專用的行駛車組和操作設定檔。在功能表“編輯”選項-“交通”中按一下“車輛組”以打開“編輯車輛組”介面。透過在“行駛車輛組”專案中點擊“新建”按鈕來創建新的行駛車輛組(圖像中為緊急車輛),並透過在“運行設定檔”中創建新的或複製其他車輛模型來添加專用的設定檔。在該圖中,我們添加了一個名為“救護車”的操作設定檔。 然而,當選擇了行駛車輛組的“緊急車輛”的情況下,在“運行設定檔”中只勾選“救護車”的選項時,其他行駛車輛組的“救護車”的“運行設定檔”將不會被勾選。 另外,可以選擇適當的“救護車”音檔。
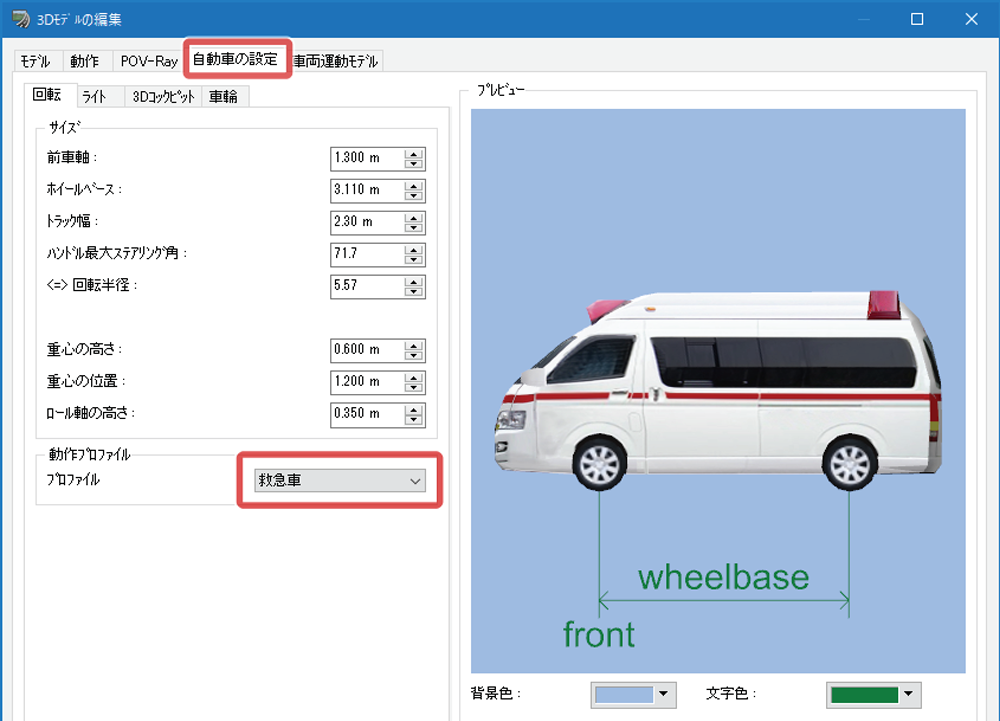
接下來,將新創建的操作設定檔分配給汽車模型。打開想控制的汽車模型的編輯介面,然後在“汽車設置”選項裡,將操作設定檔設置更改為新創建的設置(這裡是救護車)。如果想要運行多個相同的模型並僅控制其中之一的話,可以複製汽車模型並在隨機運行的模型和受控模型之間進行區分。
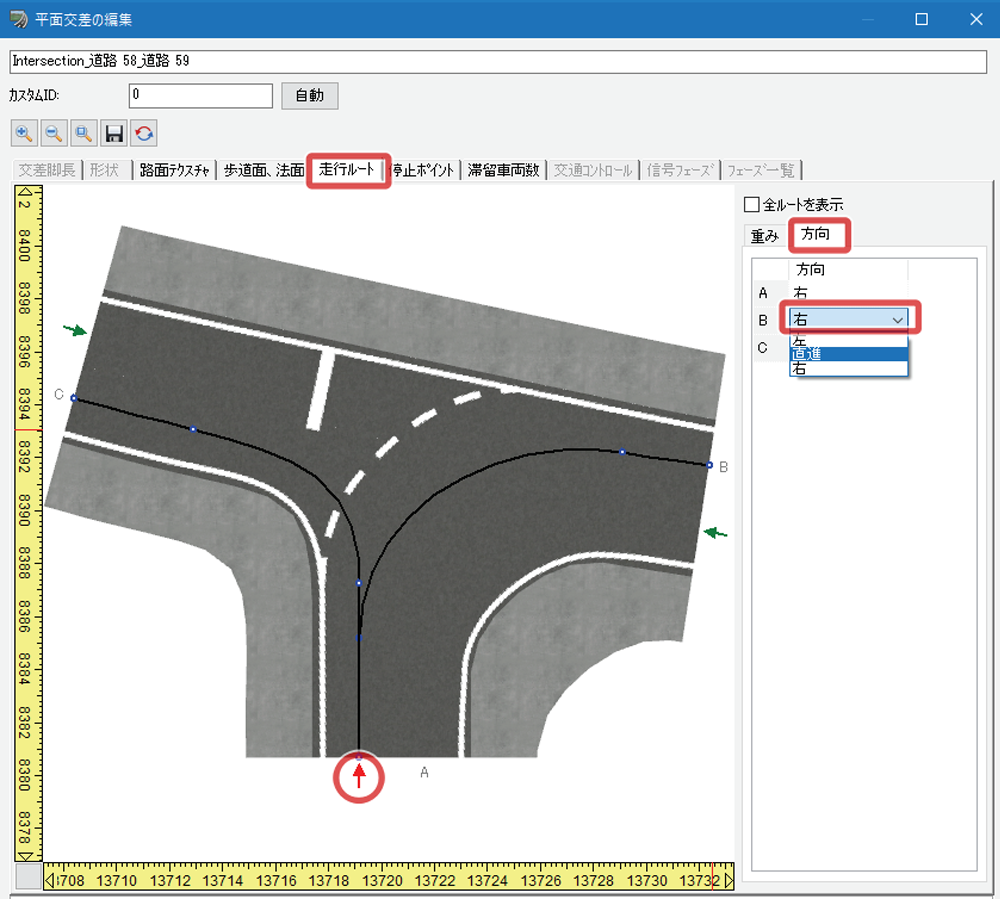
如果完成車輛組的設置後,下一步是指定行駛路線。左鍵按一下路線上的交叉路口,然後按右鍵以打開“編輯平面交叉”介面。在“行駛路線”選項中可以指定每個行駛車輛組的行進方向。當“緊急汽車”必須左轉時,點擊圖像中指示的進入路線的箭頭,在右邊的表格中勾選“緊急汽車”組,然後僅輸入左轉方向上的重量值,將其他的設置為0。像這樣,透過僅在一列中輸入重量值,勾選的設定檔的車輛就只能向特定的方向前進。
方向燈的控制 在交叉路口向左或向右轉彎時,方向燈閃爍是用軟體自動控制的。但是根據道路構造的不同,也有需要改變方向燈閃爍的情況。例如圖中十字路口的情況,在預設設定下從下面進入並向右行駛的汽車被識別為右轉彎並自動打右轉彎燈,但是在這種結構的情況下,因為這是從下往右直行的方法,所以是不需要打方向燈。 如果想要從初始設定開始改變閃燈運行的話,可以在十字路口的編輯畫面中進行設定。在編輯介面的“行駛路線”選項中,點擊改變行駛路線底部的進入點(綠色箭頭),在右側的“方向”標籤中改變進出點的方向。這種情況下,向右前進的路線在默認設定中是“右”,所以要變更為“直行”。這樣,從下面往右行駛的車輛就不需要打轉向燈。
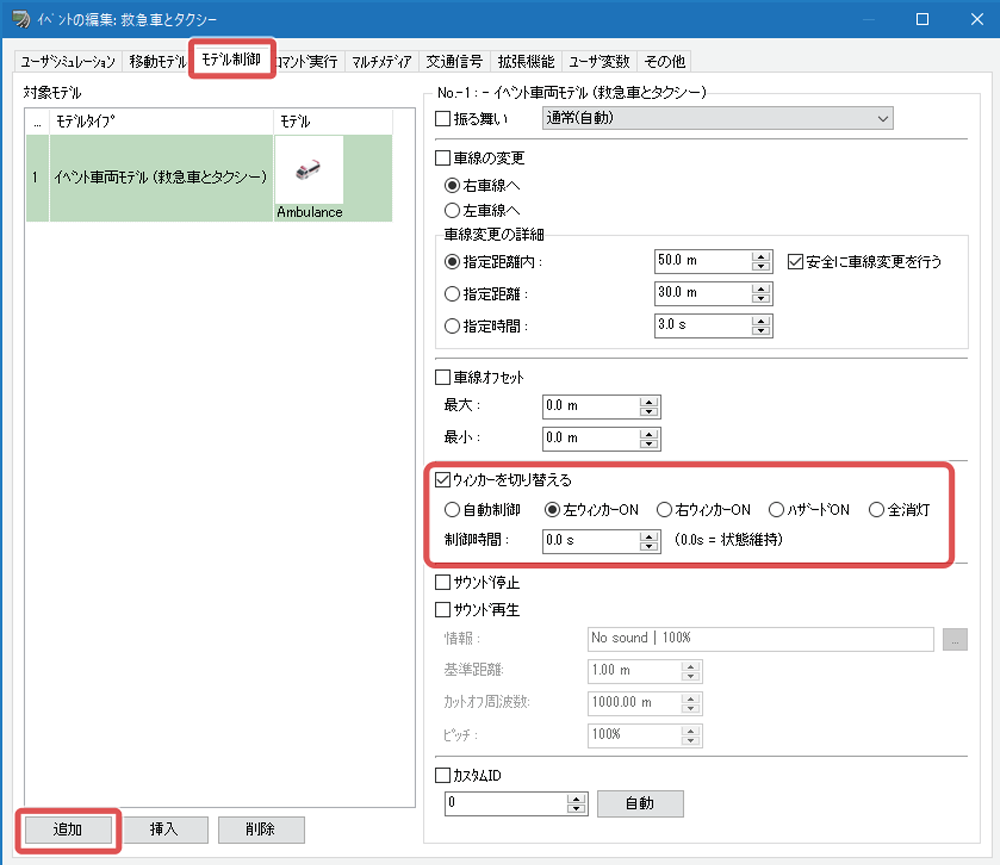
另外,可以透過腳本控制特定車輛的閃燈,也可以在“事件編輯”的“模型控制”選項中進行設置。選擇目標模型,在右側的“切換燈光”選項中指定閃爍模式和控制時間。
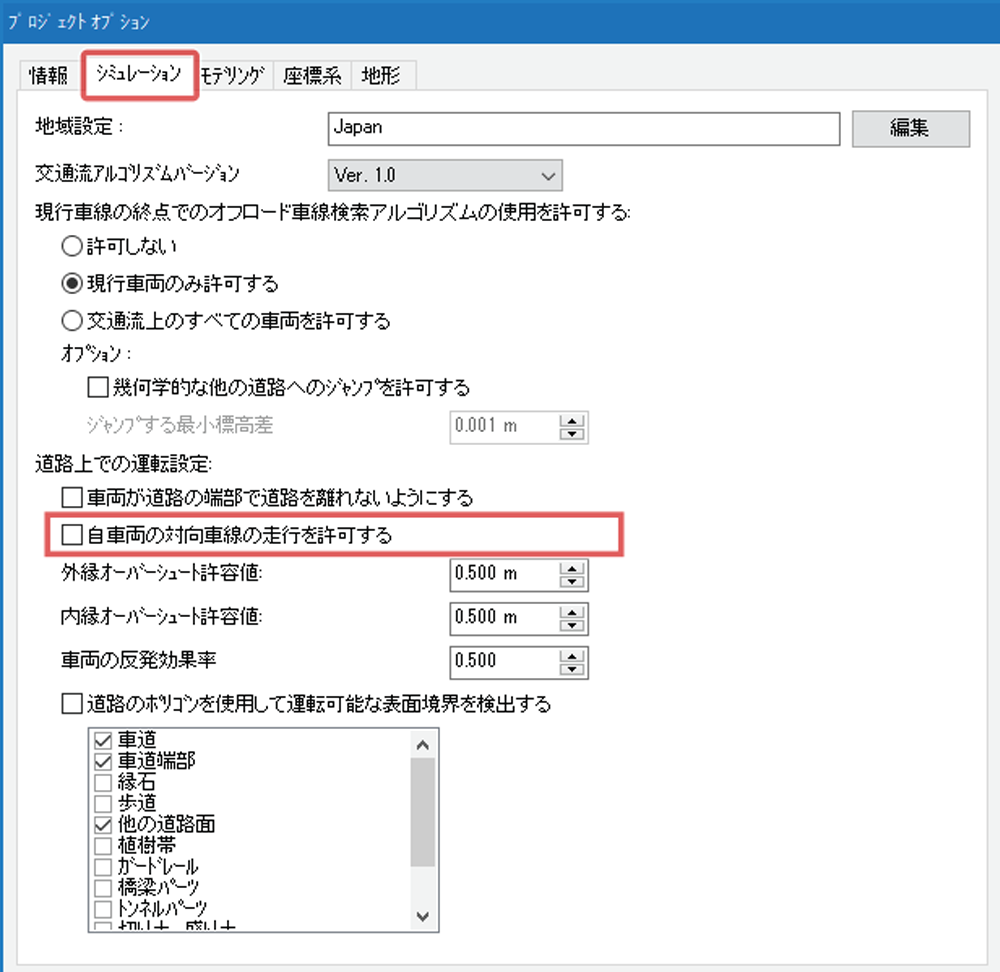
在Ver.14.2中可設定駕駛範圍 從版本14.2開始,可以允許車輛在反向車道進行超車。以往在反向車道上行駛時,需要創造一個特殊的道路剖面。但是在Ver.14.2中,不需要特殊的構造就可以在反向車道上行駛。 透過在功能表“檔案”-“專案選項”-“模擬”選項中選擇“允許車輛在反向車道上行駛”,就可以允許車輛在反向車道上行駛。
UC-win/Road的交通流今後也會繼續改善,敬請期待。 |








|
|||
| (Up&Coming '21 新年刊) | |||
 |


