| Support Topics | |||
| 支援主题・ UC-win/Road | |||
|
|||

|
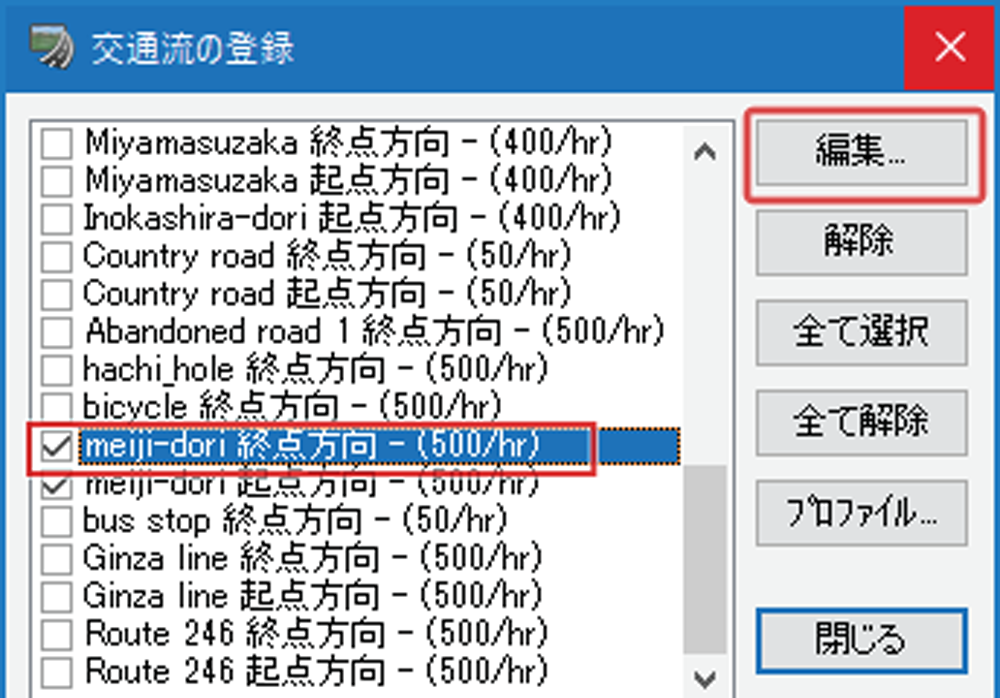
UC-win/Road具有丰富的交通模拟功能。以下我们将介绍与交通流相关的一些高级设置和控制方法。 每个车道的交通量和速度的变化 UC-win/Road中的交通量由道路每小时产生的车辆数量而变化,不仅是每条道路,可以为每条车道设置交通量、速度和交通配置文件(车型构成)。通过设置,我们可以根据不同的道路情况真实再现交通状况,例如每条车道的拥挤差异,公交车道的表现或者卡车多的高速公路的行驶车道以及与超车道的速度差。 可以通过点击菜单“编辑”选项卡-“交通”选项卡-“生成”,打开“交通流注册”界面进行设置。
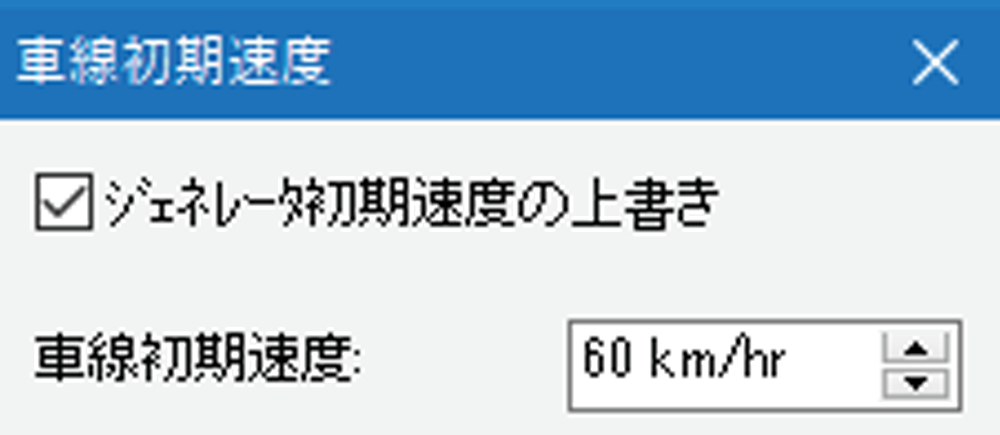
选择目标交通流,点击“编辑”,打开“交通流编辑”界面。然后点击[+],打开车道,可以为每条车道设置交通量、初始速度和配置文件。
指定特定车辆的行进方向 通常情况下,在UC-win/Road道路中行驶的车辆,在十字路口或车道分歧点会随机决定要往哪个方向行驶,即使反复模拟,同一辆车也不会一直往同一个方向行驶。如果你想让自动驾驶车辆在特定的路线上行驶,或者想让场景中出现的车辆在指定的路线上行驶,你可以通过添加行驶车组来固定路线。 例如在场景中,从后面驶来的紧急车辆在超越汽车后,在下一个十字路口左转,你可以设定这个事件,让车辆必须朝这个方向前进。
首先,创建特定车辆专用的行驶车组和操作配置文件。在菜单“编辑”选项卡-“交通”中单击“车辆组”以打开“编辑车辆组”界面。通过在“行驶车辆组”项目中点击“新建”按钮来创建新的行驶车辆组(图像中为紧急车辆),并通过在“运行配置文件”中创建新的或复制其他车辆模型来添加专用的配置文件。在该图中,我们添加了一个名为“救护车”的操作配置文件。 另外,当选择了行驶车辆组的“紧急车辆”,“运行配置文件”只进入“救护车”的检查,其他行驶车辆组的“救护车”的“运行配置文件”不进入检查的状态。 另外,选择适当的“救护车”声音配置文件。
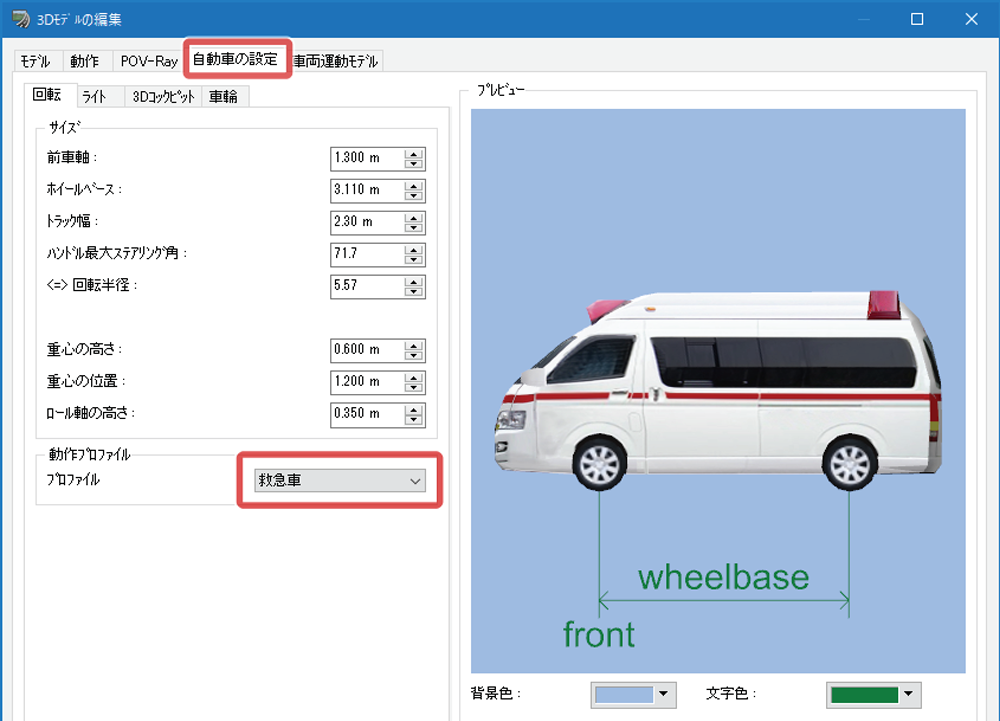
接下来,将新创建的操作配置文件分配给汽车模型。打开要控制的汽车模型的编辑界面,然后在“汽车设置”选项卡上,将操作配置文件设置更改为新创建的设置(这里是救护车)。如果想要运行多个相同的模型并仅控制其中之一的话,可以复制汽车模型并在随机运行的模型和受控模型之间进行区分。
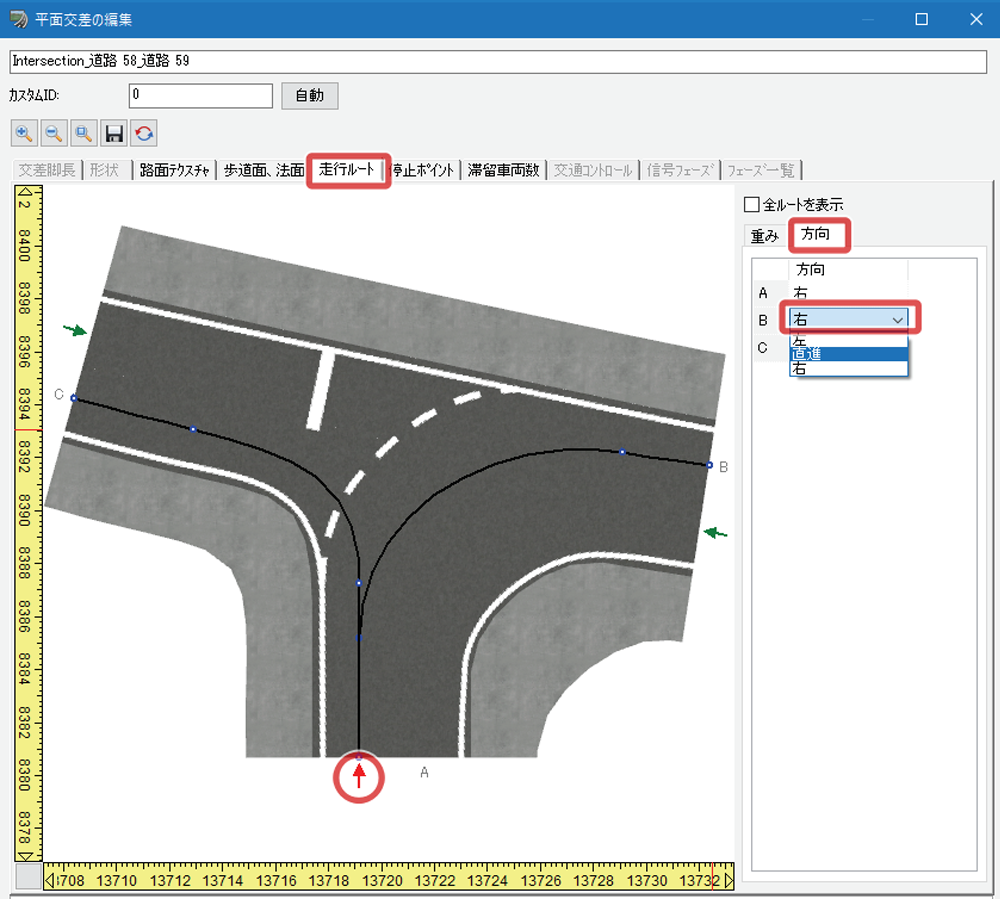
设置车辆组后,下一步指定行驶路线。左键单击路线上的交叉路口,然后右键单击以打开“编辑平面交叉”界面。在“行驶路线”选项卡中可以指定每个行驶车辆组的行进方向。当“紧急汽车”必须左转时,点击图像中指示的进入路线的箭头,在右边的表格中勾选“紧急汽车”组,然后仅输入左转方向上的重量值,将其他的设置为0。像这样,通过仅在一列中输入重量值,勾选的配置文件的车辆就只能向特定的方向前进。
方向指示灯的控制 在交叉路口向左或向右转弯时,转向灯闪烁是用软件自动控制的。但是根据道路构造的不同,也有需要改变转向灯闪烁的情况。例如图中十字路口的情况,在默认设定下从下面进入并向右行驶的汽车被识别为右转弯并自动打右转弯灯,但是在这种结构的情况下,因为这是从下往右直行的方法,所以不打转向灯是正确的。 如果想要从初始设定开始改变闪灯运行的话,可以在十字路口的编辑画面中进行设定。在编辑界面的“行驶路线”选项卡中,点击改变行驶路线底部的进站点(绿色箭头),在右侧的“方向”标签中改变进站点的方向。这种情况下,向右前进的路线在默认设定中是“右”,所以要变更为“直行”。这样,从下面往右行驶的车辆就不需要打转向灯。
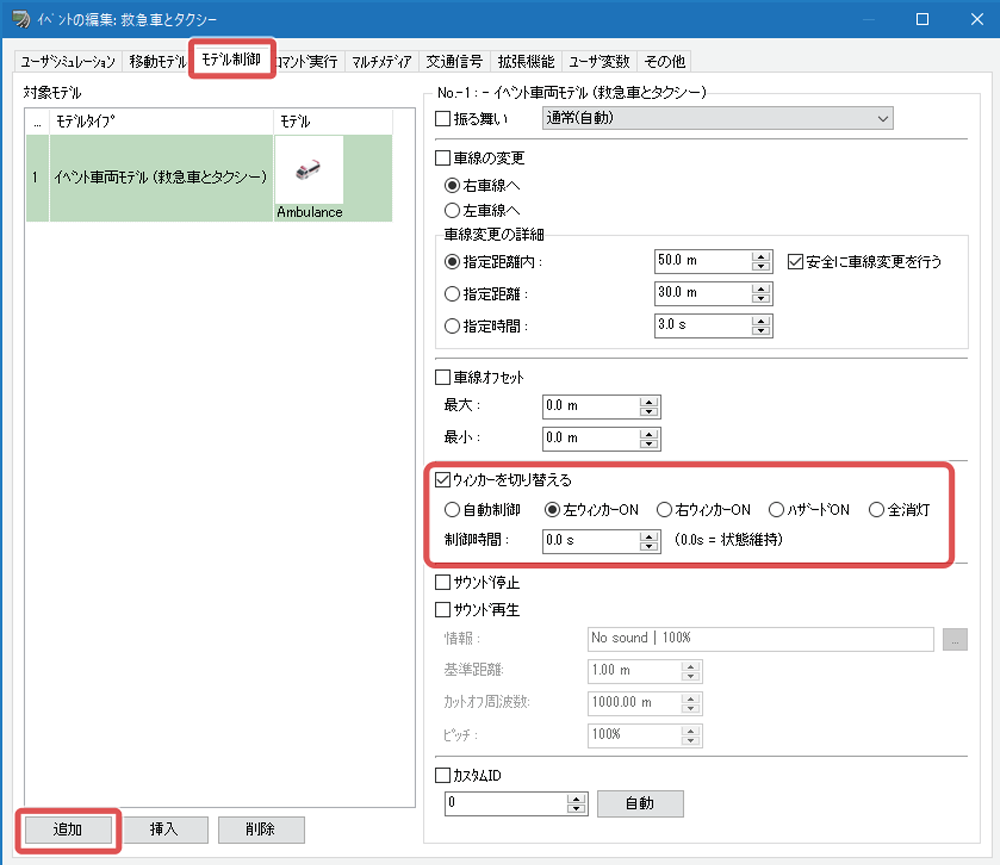
另外,可以通过脚本控制特定车辆的闪灯,也可以在“事件编辑”的“模型控制”选项卡中进行设置。选择目标模型,在右侧的“切换灯光”选项卡中指定闪烁模式和控制时间。
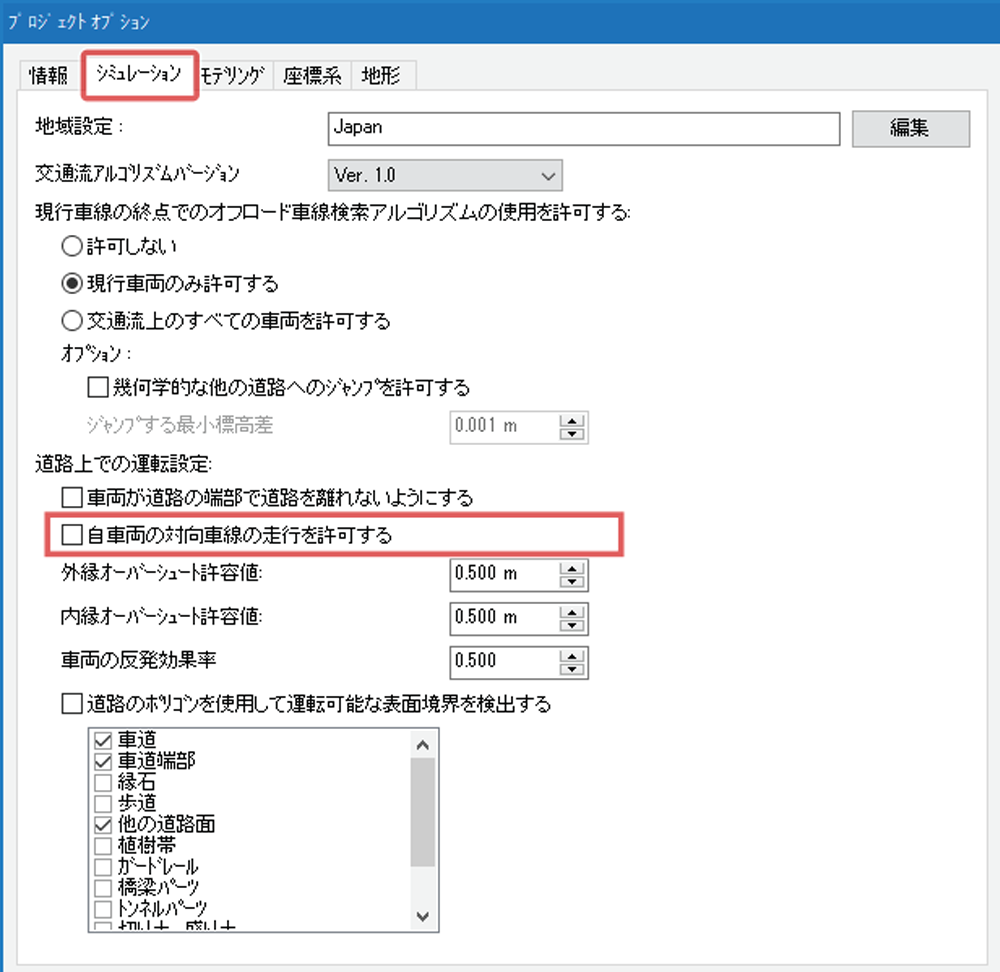
在Ver.14.2中的可驾驶范围设定 从版本14.2开始,可以允许车辆在车道外行驶。以往在反向车道上行驶时,需要创造一个特殊的道路剖面。但是在Ver.14.2中,不需要特殊的构造就可以在反向车道上行驶。 通过在菜单“文件”-“项目选项”-“模拟”选项卡中选择“允许车辆在反向车道上行驶”,就可以允许车辆在反向车道上行驶。
UC-win/Road的交通流今后也会继续改善,敬请期待。 |








|
|||
| (Up&Coming '21 新年刊) | |||
 |


