|
 |
| ■그림1 차량 귀적 작도 시스템 - 차량 등록 설정 | ■그림2 차량 귀적 도면 확인 |
 |
 |
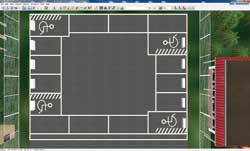
| ■그림3 주차장 작도 시스템 - 주차 매스 일괄 배치 | ■그림4 주차장・차량 귀적 CAD 연계 결과 |
| New Products | ||||||||
|
||||||||
| 자동차 지원 시스템이란 |
| 최근 승용차 기능이 향상되면서 자동 주차 시스템을 탑재한 차가 증가하고 있습니다. 이 시스템은 카메라 사진과 초음파 센서 정보를
바탕으로 주차할 때 스테어릴 조작을 차가 자동적으로 한다는 것입니다. 운전자는 주의 상황에 신경 쓸 필요가 있지만 기본적으로는
음성 안내에 따아서 액셀, 브레이크,실렉트바를 조작해서 차고에 차를 넣거나 종렬 주차를 쉽게 할 수 있습니다. 그리고 고정밀도한
초음파 센서를 사용해서 장애물의 자동 검지와 정지도 가능합니다. 현재 자동 주차 지원 시스템은 도요타 플라우스와 Lexus 브랜드 차, VW의 Parking Assist와 BMW의 Auto Parking System, Honda의 스마트 파킹 어시스트 등 많은 자동차 제조 회사들에서 사용되고 있습니다 |
| 자량 귀적・주차장 CAD와 연계 |
포럼에이트는 차량 귀도・주차장 설계・자동 주차 시스템 통합 솔류션을 제안합니다. 포럼에이트 UC-1시리즈의 차량 귀적 작도 시스템은 [세미트레일러 및 플트레일러 직각시회 귀적도 양식(JASO Z006-92),사단 법인 자동차 기술회] 등의 작도 이론을 근거해서 차량 주행 귀적을 계산・작도해 상정한 노선과 기존의 노선에 대한 주행 시뮬레이션, 차량 귀적의 작도를 효율적으로 하실 수 있습니다. (그림1,2) 작성한 도면은 UC-1 시리즈 주차장 작도 시스템과 연계해서 주차 매스를 나갔다 들어갔다 하는데에 문제가 없는지를 검토하면서 주차장 설계를 하실 수 있습니다 (그림3,4) 이
추자장 도면을 UC-win/Road에 가져와서 VR 공간에서 주차장을 생성하거나 도면을 프린트 아웃 해서 RoboCar(R)이
시뮬레이션 주행을 하는 곳으로서 이용합니다.
|
| RoboCar(R)로 인한 시뮬레이션 |
| 포럼에이트는 로봇 공학 분야 시뮬레이션으로서 RoboCar(R)을 사용하고 있습니다. RoboCar(R)는 차를 축소한 모델이며
탑재한 디바이스와 소프트웨어를 사용해서 자율 주행 등 복잡한 제어를 할 수 있습니다. RoboCar(R)는 Linux을 베이스로
한 메인 보드로 인해 관리되어 있어서 외부에서 무선 LAN을 사용해서 조작할 수 있습니다. UC-win/Road for RoboCar(R)는
3차원 리얼타임 VR과 RoboCar(R)을 연계하는 시스템입니다. 이 시스템을 사용함으로써 3DVR 환경에서 시뮬레이션을 하면서 현실 공간에서 동작을 확인할 수 있습니다. 또한 UC-win/Road 드라이브시뮬레이터를 사용해서 RoboCar(R)을 운전할 수도 있습니다. |
| AURELO(확장 현실 위치 결정 시스템) |
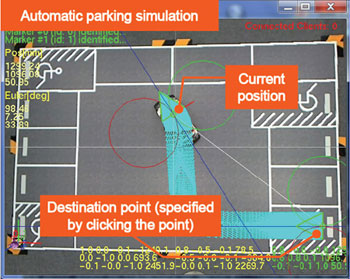
| RoboCar(R) 시뮬레이션을 적절하게 하기 위해서 UC-win/Road는 정확한 위치 정보를 파악할 필요가 있습니다. RoboCar(R)는 주행 거리 계측법을 사용해서 현재 위치를 추정합니다. 주행 거리 계측법은 차륜 모터 회전수를 엔코더에서 계측해서 회전수의 차이에서 위치를 산출합니다. 하지만 이 수법에서는 차륜 스립과 차륜폭 변동 등 엘러가 많아 주행 거리에 따라 차이가 발생합니다. 이 문제를 해결하기 위해서는 GPS처럼 정기적으로 실제 위치 정보를 얻을 필요가 있습니다. AURELO(확장 현실 위치 결정 시스템 : AUgmented REality LOcalization system)은 RoboCar(R)의 절대 위치・방위 정보를 추적하기 위한 시스템입니다. 라이브 비디오에서 AR Marker라고 하는 마커 3차원 좌표(x,y,z) 및 방위 (α,β,γ)을 취득합니다. 바탕이 다른 마커 2개를 동시에 사용함으로써 RoboCar(R)의 위치・방위를 리얼타임으로 측정할 수 있습니다. 측정 오차는 카메라와 마커 거리가 1.5m보다 짧을 경우 위치 7mm 미만, 방위 2도 미만입니다. 카메라가 멀어져 가면 측정 정밀도는 떨어지지만 광범위에서 좌표를 취득할 수 있습니다. (그림5)
|
|||||
| RoboCar(R)로 인한 자동 주차 시스템 |
현재 포럼에이트는 RoboCar(R) 기능 중 임의의 지점에서 지정한 주차 매스에 주차・종렬 주차를 자동으로 할 수 있는 자동 주차 시스템을 개발 중입니다. (그림5) RoboCar(R) 는 UC-win/Road 의 모델과 동기할 수 있어서 자동 주차 모습을 VR로 확인하실 수 있습니다. (그림6) UC-win/Road는 VR을 사용해서 현실같은 주차장을 쉽게 재현해 마음대로 시점을 바꿀 수 있기 때문에 다양한 방향에서 자동 주차 모습을 확인할 수 있습니다. (그림7)RoboCar(R) 자동 주차 시스템은 AI(인공 지능 : Artificial Intelligence)을 사용하고 있습니다. AI란 컴퓨터에 인간과 같은 지능 처리를 실현하게 하는 기술을 말합니다.여기서는 경로 탐색, 결정을 합니다. (그림8)
)RoboCar(R) 의 현위 위치는 AURELO의 의치・방위 정보를 사용합니다. 그리고 주차 목표 지접은 자동 주차 시스템을 갖춘 주차장 지도를 토대로 합니다. 항상 RoboCar(R) 의정확한 위치 정보를 취득함으로써 경로와 오차가 발생한 경우엔 AI가 곧바로 루트 수정을 해줍니다. AI는 여러 루트에서 효율적인 루트를 선택할 뿐만 아니라 루트에 있는 장애물을 피하고 새로운 루트를 탐색하는 등 사람이 운전할 경우와 동일하게 생각하고 동작합니다. UC-win/Road는 스테어링 콘트롤러를 사용한 드라이브 시뮬레이션을 서포트합니다. 이번에 새로운 기능으로서 포스 피드백 기능을 개발했습니다. 포스 피드백이란 스테어링에 저항감을 주는 기능이며 회전량에 따라 저항감이 달라집니다. 자동 주차 시스템은 실제 자동 주차 지원 시스템처럼 자동적으로 스테어링이회전되는 모습을 재현합니다 .그리고 스테어링에 있는 버튼을 누루면 자동 주차를 시작하거나 정지할 수가 있습니다. 액셀・브레이크 조작도 가능합니다. 이번 자동 주차 시스템은 RoboCar(R) 을 외부에서 제어하지만 다음 단계에서는 RoboCar(R) 내부에 탑재할 예정입니다. RoboCar(R)이 스스로 AURELO에서 정보를 취즏, 경로 탐색・결정을 하고 스테레어 카메라 등 센서 정보를 토대로 해서 스스로 주차 가능한 공간을 탐색하는 등 보다 현실에 가까운 자동 주차를 할 수 있도록개발을 진행하고 있습니다. |
|||||||
| (Up&Coming '11 한여름호 게재) | ||
 |