|
|||||||||||||||||||||
|
|
||||||||||||||||||||




|
Université de Hokkaido se vantant de son histoire de plus de 140 ans, positionnement de laboratoire Bien que les chutes de neige semblent moins importantes que la moyenne annuelle, il reste un long mur de neige non fondue des deux côtés de la rue principale autour de la gare JR Sapporo au début du mois de mars. Près de la gare se trouve le "Laboratoire d'ingénierie de la mobilité et des transports avancés (Hagiwara)" sur le campus de l'Université d'Hokkaido à Sapporo, où nous nous sommes rendus. L'origine de l'université d'Hokkaido remonte au collège agricole de Sapporo fondé en 1876. Après plus de 140 ans, l'Univ. est maintenant organisé par 12 écoles de premier cycle (faculté des lettres, faculté de droit, faculté des sciences, faculté de médecine dentaire, faculté de génie / faculté de génie, école de médecine vétérinaire, faculté de médecine vétérinaire, faculté de médecine Commerce, école de médecine, école de sciences pharmaceutiques et de pharmacie, école d'agriculture, école de science de la pêche) et 24 écoles supérieures. Plus de 18 000 étudiants d'écoles de premier cycle et de cycles supérieurs apprennent au total (en avril 2018) dans les deux campus de Sapporo et de Hakodate qui constituent la base de l'éducation et de la recherche. Parmi eux, la Graduate School of Engineering à laquelle appartient Hagiwara Lab couvre 13 divisions et 37 groupes de recherche. Ces divisions sont les suivantes: Physique appliquée, Chimie appliquée, Science et génie des matériaux, Ingénierie mécanique et spatiale, Systèmes et conception en mécanique humaine, Systèmes énergétiques et environnementaux, Science et génie quantiques, Ingénierie de terrain pour l'environnement, Ingénierie et politique de l'environnement durable conception structurelle, systèmes environnementaux humains, génie de l'environnement et génie des ressources durables. Les divisions d’ingénierie et de politique pour l’environnement durable sont divisées en groupe de recherche sur l’ingénierie des systèmes d’infrastructure durable et groupe de recherche sur les politiques en matière d’ingénierie et d’environnement. Hagiwara Lab. est inclus dans ce dernier. Étendre la focalisation sur le comportement du conducteur à la conduite automatisée la plus récente Basé sur des recherches liées au comportement du conducteur et à la visibilité en particulier, Hagiwara Lab. travaille à la recherche et au développement contribuant à la société dans les domaines allant de la planification des transports à l’ingénierie du trafic, à la science des systèmes sociaux / de sécurité et au génie civil. Une idée de prévenir les accidents de la route sous des angles différents est commune à toutes les recherches du laboratoire. Le professeur Hagiwara s'est depuis 30 ans concentré sur le comportement du conducteur. Plus tard, il est venu étudier "ce que le conducteur voit et pense, les actions qu'il entreprend et les résultats qui en résultent", en mettant l'accent sur "les accidents de la route causés par une erreur du conducteur", ce qui pose un problème particulier. Il s'est efforcé de rechercher et de développer des contre-mesures et des technologies permettant aux conducteurs de ne pas commettre d'erreur. Ces dernières années, selon lui, alors que les efforts en matière de conduite automatisée progressaient, les performances du véhicule lui-même s'amélioraient certes, mais l'essentiel du contrôle d'un véhicule passait progressivement du conducteur à la machine. "C'est maintenant ce qui va le plus changer. Les dernières recherches ont tendance à être comme ça (comme mentionné à l'ouverture)." Il y a environ 5 ans, il a ajouté la conduite automatisée à ses sujets de recherche. Depuis lors, pour que la conduite automatisée devienne plus que jamais le courant principal, il s’intéresse à "ce qui devrait être fait" du point de vue de la production d’infrastructures routières, plutôt que du côté système de la conduite automatisée, au comportement du conducteur.Le Professeur Hagiwara a mentionné deux recherches ayant reçu des subventions du programme "Recherche et développement technologiques 2017 contribuant à l'amélioration de la qualité des politiques routières" par Road Bureau, MLIT. L'un d'entre eux est "Recherche et développement concernant l'éclairage des routes en faisceau dans l'agglomération" avec pour cadre politique une contre-mesure des accidents de la route (représentant de recherche: Prof. Hagiwara, période de recherche: 3 ans de 2016 à 2018). Il s’agissait d’une contre-mesure permettant au conducteur de découvrir plus tôt un passage pour piétons afin de prévenir les accidents de passage entre piétons dans les rues la nuit. Dans le cadre de cette recherche, "l'éclairage routier pro-beam" a été développé pour les rues, qui devaient découvrir plus tôt les piétons qui passaient en croisant la lumière en direction du véhicule pour coopérer avec l'éclairage des phares. Une autre est "Recherche et développement concernant de nouvelles politiques de circulation routière pour soutenir les espaces de production utilisant la conduite automatisée et Michinoeki (stations en bordure de route)" qui correspond à un problème spécifique ("Infrastructure routière nécessaire pour réaliser une société de conduite automatisée") (représentant de recherche: Mikiharu Arimura , Professeur agrégé, Muroran Institute of Technology, période de recherche: 3 ans de 2017 à 2019). Il s’est concentré sur "un espace de production" pour prendre en charge l’agriculture, la foresterie, la pêche et le tourisme à Hokkaido, où la dépopulation rend difficile le maintien des transports en commun et de la distribution des produits de base. En ce qui concerne l'environnement de circulation avec lequel les personnes peuvent continuer à vivre dans l'espace productif, la recherche et le développement continuent sur la manière dont les politiques en matière de circulation routière devraient inclure la mise en œuvre de l'utilisation de la conduite automatisée et de Michinoeki. En participant à la recherche, le professeur Hagiwara a adopté UC-win / Road DS.En outre, il coopère également avec des groupes extérieurs à l'université, notamment le bureau de développement régional de Hokkaido (MLIT), East Nippon Expressway Co., Ltd (NEXCO Est), Central Nippon Expressway Co., Ltd (NEXCO Central), West Nippon Expressway Co. ., Ltd. (NEXCO West), l’Institut de recherche Nippon Expressway Research Co., Ltd. (NEXCO RI), le pont Honshu-Shikoku Expressway Co., Ltd. (HSBE). Ils ont effectué des recherches conjointes, par exemple, sur le type d'éclairage de la route et des tunnels facile à voir la nuit, etc. compte tenu de la visibilité des conducteurs.
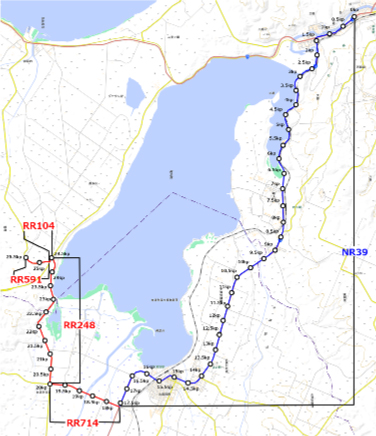
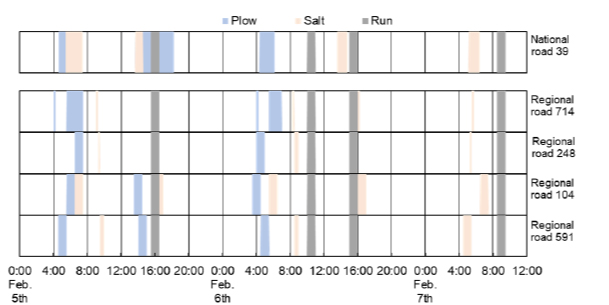
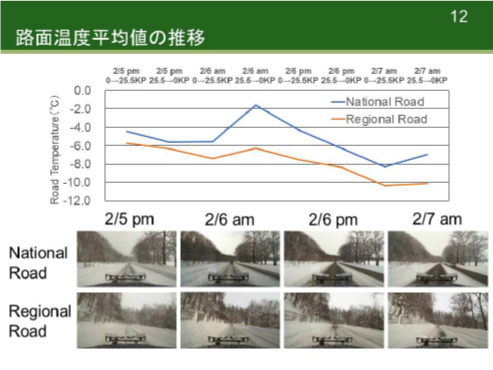
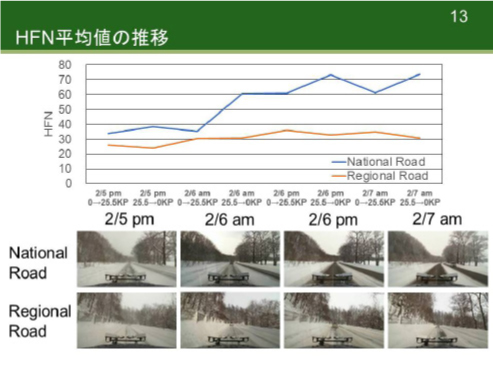
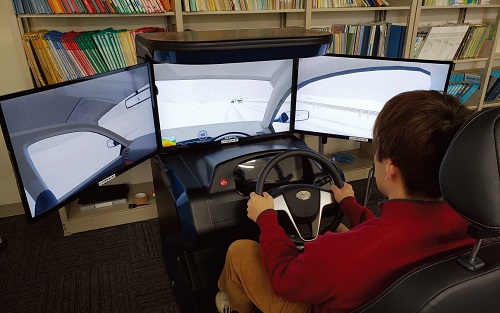
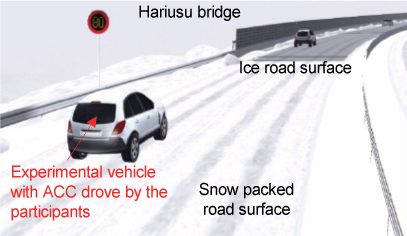
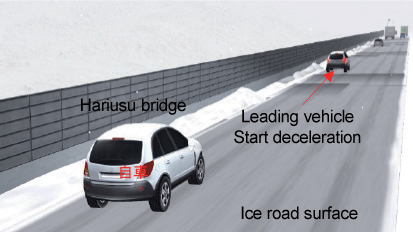
UC-win / Road DS adopté pour examiner le comportement des conducteurs lors de l'utilisation de l'ACC en hiver IDans les recherches sur la conduite automatisée entreprises par le professeur Hagiwara il y a environ 5 ans, la même approche a été adoptée: elle consistait à mesurer le comportement des conducteurs sur le terrain. Au contraire, en participant à la recherche et au développement technologique accordés par Road Bureau, MLIT, "Recherche et développement concernant les nouvelles politiques de circulation routière destinées à soutenir les espaces de production utilisant la conduite automatisée et les Michinoeki (stations en bordure de route)" lancés au cours de l'exercice 2017, il a été supposé utiliser la technologie VR. Dans ce but, il mentionne 2 points: 1) Lorsque le véhicule réel se déplace dans les champs, il est impossible de définir les mêmes conditions expérimentales à chaque fois. Au contraire, la reproductibilité des conditions expérimentales et de la conduite automatisée étant élevée avec la réalité virtuelle, il est possible de faire des comparaisons dans les mêmes conditions; 2) Même s'il existe une situation dans laquelle une collision se produit en réalité virtuelle, aucun danger réaliste ne l'accompagne. "(Dans cette recherche), nous avons essayé de faire face à l’hiver (c’est-à-dire effectuer des expériences dans l’environnement routier de la saison hivernale, quand il n’ya pas quelques facteurs qui rendent la conduite difficile, par exemple la chaussée gelée et la mauvaise visibilité). nous avons décidé d'utiliser la réalité virtuelle car il était difficile de créer la même condition à chaque fois, par exemple, "glisser sur la surface de la route" (sur le terrain).
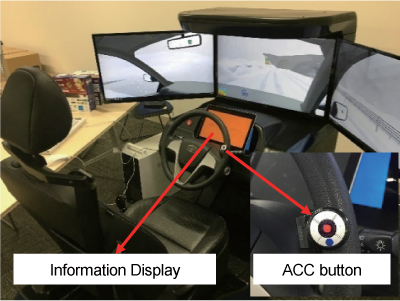
Premièrement, en ce qui concerne le fonctionnement du système de conduite automatique dans l'environnement routier en hiver, le professeur Hagiwara a défini le rôle du côté de la route comme "communication d'événements à risque non détectables par le système de détection du système de conduite automatique tel que la surface ou la visibilité de la route. conditions à venir pour le système de conduite automatisée ". Cette recherche examine "la fourniture d'informations aux conducteurs qui utilisent le régulateur de vitesse adaptatif (ACC) sur les autoroutes en hiver, afin d'éviter à l'avance les risques liés à la chaussée glissante (route à faible μ)". Ensuite, il a mesuré la différence entre 1) la conduite après avoir fourni au conducteur des informations sur la route à faible µ devant, et 2) la conduite après que le conducteur ait non seulement des informations sur la route à faible µ, mais également les mesures à prendre. Des expériences utilisant le DS ont été intégrées car il était impossible de reproduire de telles situations sur des routes réelles. Au cours du premier exercice des 3 années de la période de recherche (exercice 2017), 48 étudiants de l’Univ. pris part à la recherche et mené les expériences ci-dessus. D'autre part, les résultats des expériences sur le terrain d'un autre projet sur lequel ils ont travaillé séparément ont montré que l'influence du glissement sur le revêtement de la chaussée mais également de son tracé était considérable. Par conséquent, au cours de la deuxième année (exercice 2018), les situations ont été quelque peu modifiées par rapport à l'exercice précédent et des éléments de tracé de la route ont été ajoutés à la conception. 32 étudiants y ont participé et ont mené des expériences similaires.
Dernière année de recherche et d'utilisation de la réalité virtuelle à l'avenir "Il était facile de reproduire une route avec VR en utilisant UC-win / Road. Il n'a fallu que peu de temps pour créer une route proche de la route réelle." Pour préparer la réalité virtuelle utilisée dans les expériences, le laboratoire a créé les données de terrain dans un environnement expérimental, en utilisant UC-win / Road. Le personnel de FORUM8 a apporté son aide à tout moment en modifiant légèrement le scénario ou en personnalisant la fonction manquante dans UC-win / Road. Puis l'Univ. ajustement final du scénario expérimental. Grâce à ce processus, il a réalisé non seulement l’avantage de UC-win / Road, dont "très utile en grande partie", mais aussi ses problèmes. Sur la base de ces informations, le professeur Hagiwara envisage de répéter les expériences du dernier exercice (exercice 2019) en utilisant la réalité virtuelle de la même manière que l'exercice précédent, modifiant légèrement le système de conduite automatisée. "(Dans cette recherche), nous utilisons la réalité virtuelle pour comprendre l’interaction entre la conduite automatisée et le conducteur. C’est sur cette base que nous aimerions diriger vers l’avenir, par exemple, développer une meilleure interface pour la conduite automatisée ou améliorer la route. afin que les conducteurs ne commettent pas d'erreurs. " |
|||||||||||||||||||||||||||||||||
| (Écrit par Takashi Ikeno) (Up&Coming '19 Edition du printemps) |
|||||||||||||||||||||||||||||||||

|
||||

