
Hệ thống tùy biến của UC-win/Road: Hệ thống vẽ bản đồ di động (MMS)
Plugin mô hình đám mây điểm
(UC-win/Road Point Cloud Modeling)
Phát hành lần đầu: 21.09.2010
- USD 1,730
Thông tin sản phẩm & dịch vụ liên quan:
UC-win/Road / Dịch vụ quét laser và dựng mô hình 3D
Tổng quan về chương trình
Một ứng dụng phổ biến của dữ liệu số 3D trong trắc địa và xây dựng là tạo mô hình 3D sử dụng dữ liệu đám mây điểm (point cloud) được quét/ thu thập tại hiện trường bằng các thiết bị định vị GPS có độ chính xác cao.
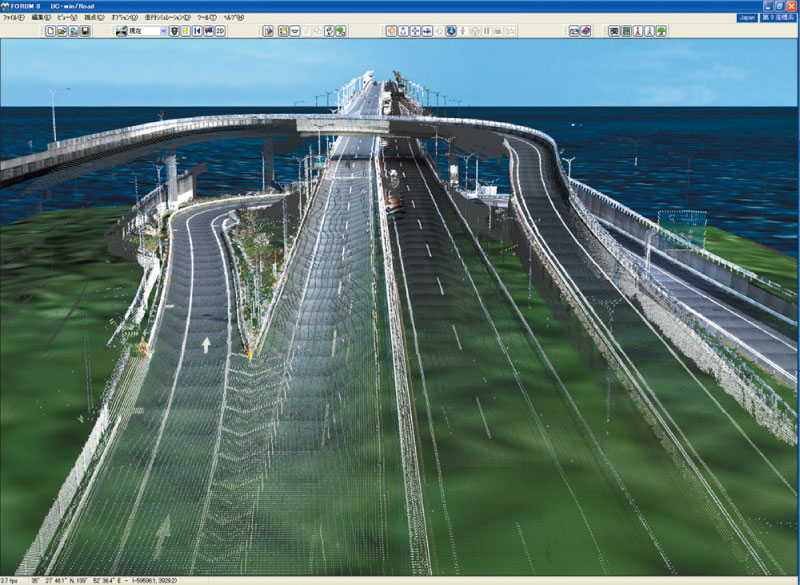
Trong một dự án mẫu, FORUM8 đã tiến hành quét dữ liệu point cloud của khu vực bãi đỗ xe Umi-hotaru (thuộc tuyến cao tốc Aqua Line băng qua vịnh Tokyo, Nhật Bản) với hệ thống MMS (lập bản đồ di động) của Mitsubishi.

▲ Dữ liệu point cloud khu vực nút giao Shibuya (Tokyo, Nhật Bản)
Tính năng nổi bật
■Dựng mô hình VR sử dụng dữ liệu point cloud/ cung cấp bởi dịch vụ hỗ trợ UC-win/Road
■Phát triển tính năng tùy biến cho phép dựng mô hình VR từ dữ liệu point cloud
Các tính năng chính
-
- Dữ liệu point cloud có thể được sử dụng để đối chiếu và vạch tuyến trong UC-win/Road.
Người dùng có thể xem chúng là công cụ xử lý dữ liệu MMS hoặc công cụ dựng mô hình VR. - Dữ liệu point cloud đóng vai trò là công cụ phân tích ngược cho UC-win/Road & mô hình VR
Dữ liệu point cloud có thể được sử dụng để kiểm tra, kiểm chứng mô hình VR. Ví dụ, người dùng có thể sử dụng để kiểm tra tính chính xác của dữ liệu được tạo, hoặc để phục vụ quá trình nghiên cứu duy tu bảo trì, như phân tích sự biến đổi, xuống cấp của kết cấu, v.v. - File dữ liệu: File Excel chứa 17.000.000 thông tin tọa độ.
- Định dạng file: Tọa độ X, tọa độ Y, tọa độ Z (cao độ), R, G, B
- Nghiên cứu và thiết kế: Tìm hiểu về point cloud, chọn chương trình sử dụng
- Phân đoạn, định vị trí của tuyến đường: Tạo mặt cắt tuyến đường, đối chiếu VR Mesh Reverse và thu thập thông tin.
- Khi tạo mô hình tòa nhà, sử dụng point cloud để tạo và xác định vị trí mô hình, đo đạc kết cấu chính xác.
- Chỉnh dữ liệu VR trên UC-win/Road, tìm hiểu cách sử dụng dữ liệu point cloud và cách tạo dữ liệu tuyến đường.
- Đo đạc tuyến đường, vật thể chính xác trong không gian 3D hoàn toàn
- Giúp dữ liệu dự án dễ hiểu hơn
- Giúp kiểm tra, kiểm chứng dữ liệu chính xác
- Sử dụng kết hợp với CAD và công cụ đo đạc trong Google Earth
- Tốn nhiều thời gian thực hiện hơn
- Tốn thời gian đào tạo, tập huấn hơn
- Yêu cầu máy tính hiệu năng cao
- Dữ liệu từ định dạng file gốc
- Định dạng file: Tọa độ X, tọa độ Y, tọa độ Z (cao độ), R, G, B
- Mở file bằng Wordpad (Không thể dùng Notepad để mở file Excel do dung lượng lớn)
- Lưu file ở định dạng .txt.
- Sử dụng GSplit để chia file text thành 1.000.000 file nhỏ.
Link phần mềm GSplit (miễn phí): http://www.gdgsoft.com/gsplit/
Sử dụng dữ liệu point cloud thu được từ MMS
●Dự án mẫu
Tổng quan về dự án: Tạo dữ liệu mẫu của "Umi-hotaru"
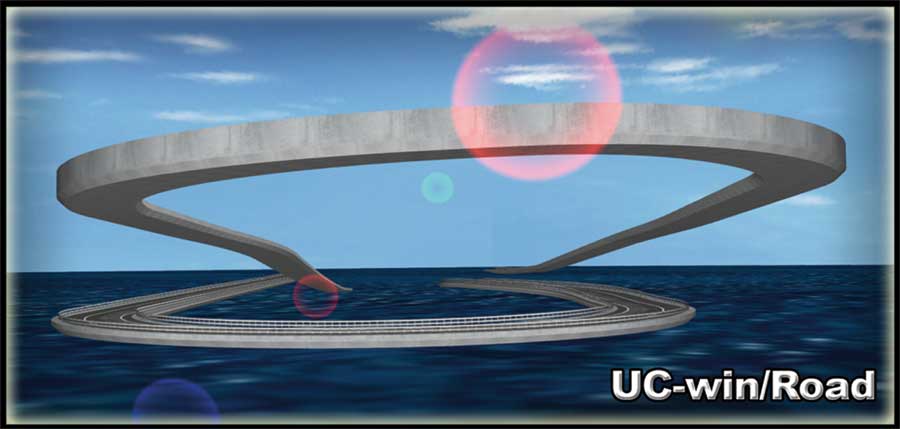
Bãi đỗ xe Umi-hotaru nằm trên đảo nhân tạo thuộc tuyến cao tốc Aqua Line bắc qua vịnh Tokyo, sở hữu nút giao với kết cấu phức tạp gồm cầu cạn, đường gom, hầm, bãi đỗ xe; do đó, đây là một ví dụ minh họa cho khó khăn và lợi ích của việc thu thập & sử dụng dữ liệu point cloud.
Sau khi chỉnh dữ liệu một phần với một công cụ dựng mô hình khác, chúng tôi đã nhanh chóng tạo mô hình VR sử dụng UC-win/Road.
●Quá trình thực hiện dự án
●Lợi ích & khó khăn khi sử dụng dữ liệu point cloud
Lợi ích
Khó khăn
●Định dạng dữ liệu
●Chuyển đổi định dạng file
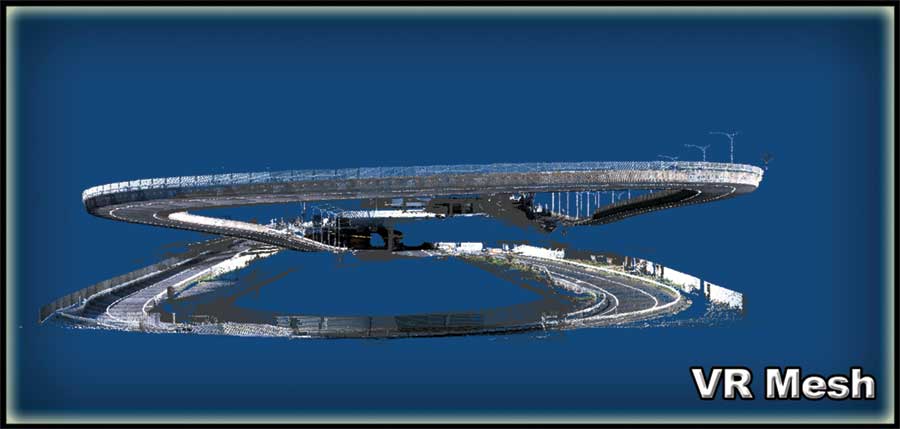
Về VR Mesh Reverse
Trong dự án Umi Hotaru, mỗi file text (sau khi chia nhỏ) chứa 1.000.000 dữ liệu tọa độ bao gồm giá trị R, G, B. Dữ liệu này có thể được sử dụng trong chương trình VR Mesh Reverse.
Ưu điểm nổi bật của VR Mesh Reverse là tính năng LOD đặc biệt cho phép người dùng xử lý, thao tác với hàng triệu dữ liệu tọa độ
VR Mesh Reverse hỗ trợ các thao tác đo lường cơ bản như thiết kế đường, xác định vị trí của vật thể với độ chính xác cao. Để xử lý 17.000.000 tọa độ, VR Mesh Reverse yêu cầu máy tính có hiệu năng rất cao. Người dùng qua việc theo dõi chương trình xử lý một lượng lớn dữ liệu point cloud cũng có thể hiểu được quá trình xử lý và tạo dữ liệu.
●Hạng mục công việc & thời gian thực hiện (dự án mẫu Umi-hotaru)
Hạng mục công việc Thời gian thực hiện Ghi chú 1. Nghiên cứu & thiết kế 5 ngày Gồm nghiên cứu chương trình phần mềm cần sử dụng.
FORUM8 thực hiện quá trình nghiên cứu2. Phân đoạn tuyến đường & định vị trí 3 ngày 3. Tạo mô hình 1 ngày 4. Chỉnh dữ liệu VR 2 ngày - Dữ liệu point cloud có thể được sử dụng để đối chiếu và vạch tuyến trong UC-win/Road.
Plugin dựng mô hình point cloud của UC-win/Road
-
Ngoài khả năng đọc dữ liệu point cloud, tùy chọn plugin point cloud còn cho phép import và diễn họa dữ liệu point cloud thu được từ các thiết bị trắc địa (như máy quét laser) vào môi trường VR 3D của UC-win/Road và hiển thị tại vị trí đã được thiết lập sẵn.
Để chuyển đổi sang dữ liệu địa hình, người dùng sử dụng dữ liệu TIN (mạng lưới tam giác không đều) được tạo ra từ dữ liệu point cloud thu được từ máy quét laser, sau đó áp dụng tính năng vá địa hình (terrain patch) để xây dựng địa hình hoàn chỉnh.
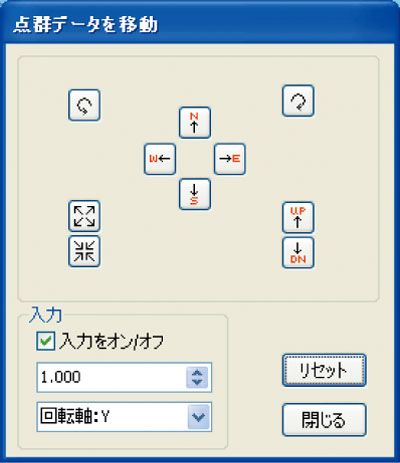
Người dùng cũng có thể chỉnh vị trí hiển thị của dữ liệu point cloud bằng cách tịnh tiến hoặc xoay các điểm.
Ngoài ra, tính năng export giúp xuất dữ liệu point cloud dưới định dạng LandXML, cho phép sử dụng dữ liệu địa hình vừa được tạo trên chương trình/ hệ thống của bên thứ 3.
▲Import dữ liệu point cloud

▲Import và diễn họa dữ liệu point cloud
▲Tùy chọn diễn họa point cloud
▲Tạo dữ liệu địa hình dạng TIN

▲Chỉnh vị trí dữ liệu
point cloud

Về tính năng lưới VR (mesh)
-
Đây là công cụ cần thiết để xử lý lượng lớn dữ liệu point cloud (vài triệu điểm).
VR Mesh Reverse: Giá niêm yết (Virtual Grid) US$ 695.00 (http://www.vrmesh.com/products/reverse.asp)
▲Tính năng LOD sử dụng set dữ liệu 17.000.000 point cloud
▲Hiển thị một phần dữ liệu bằng Window Clip
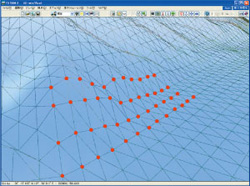
▲Đo đạc dữ liệu point cloud sử dụng tính năng tạo dữ liệu của UC-win/Road
Chọn "Analyze" để bắt đầu quá trình đo đạc.
Sau đó, chọn "Measure Distance" và chọn 2 điểm trong dữ liệu point cloud để đo khoảng cách giữa 2 điểm đó..
Người dùng lưu lại số liệu đo đạc trước đó để có được khoảng cách giữa các điểm.
Tuy nhiên, tùy thuộc vào cách chương trình đọc hiểu các mặt phẳng tọa độ khác nhau mà thời gian để người dùng làm quen với thao tác có thể kéo dài hơn.

Về mô hình UC-win/Road tạo bởi dữ liệu point cloud
-
- Sử dụng dữ liệu point cloud làm chuẩn để thiết kế hướng tuyến trên UC-win/Road
Người dùng có thể xem chúng là công cụ xử lý dữ liệu MMS hoặc công cụ dựng mô hình VR. - Sử dụng dữ liệu point cloud như là công cụ phân tích ngược cho UC-win/Road & mô hình VR
Dữ liệu point cloud có thể được sử dụng để kiểm tra, kiểm chứng mô hình VR. Ví dụ, người dùng có thể sử dụng dữ liệu point cloud để kiểm tra tính chính xác của dữ liệu được tạo, hoặc để phục vụ quá trình nghiên cứu duy tu bảo trì, như phân tích sự biến đổi, xuống cấp của kết cấu, v.v.
Người dùng dựa trên dữ liệu point cloud để vạch tuyến và thiết kế mặt cắt của đường. Dữ liệu mô hình VR có được sẽ là kết cấu có độ chính xác cao. Người dùng có thể khởi tạo mô phỏng dòng giao thông trên các tuyến đường, cũng như sử dụng dữ liệu VR để thuyết minh, thảo luận, v.v.
▲Vạch hướng tuyến đường
▲Thiết kế trắc dọc
▲Thiết kế trắc ngang

▲Hệ thống đường (mô hình ban đầu) được tạo ra nhanh chóng;
Có thể khởi tạo, mô phỏng dòng giao thông trên đường.
▲Thêm các tòa nhà, công trình phụ trợ xung quanh


FORUM8 đề xuất:
- Sử dụng dữ liệu point cloud làm chuẩn để thiết kế hướng tuyến trên UC-win/Road





MMS (hệ thống vẽ bản đồ di động) của Mitsubishi
-
- Hệ thống tích hợp gồm 3 ăng-ten GPS, bộ cảm biến đo lường quán tính (IMU), camera và máy quét laser gắn trên nóc thiết bị. Các thiết bị đều được lắp đặt trong nhà máy, do đó không cần bổ sung thêm trang thiết bị phức tạp cho phương tiện. 3 cảm biến sai khác vị trí (DPS) được lắp đặt theo hình tam giác có thể thu được vị trí, tình trạng của phương tiện với độ chính xác cao.
- Hộp cảm biến sử dụng công nghệ mới gắn thời gian với dữ liệu thu được theo chu kỳ 100 μsec. Độ chính xác của dữ liệu thu thập được không giảm ngay cả khi phương tiện chạy ở tốc độ cao. Có thể kết nối tối đa 5 camera và 5 máy quét laser.
- Vẽ bản đồ hiện trạng đường
- Dựng point cloud thành CAD/ 3D để quản lý trước/ sau thi công
- Tạo dữ liệu cơ bản để xây dựng bản đồ 3D
- Kiểm tra tình trạng đường xung quanh
- Sử dụng kết hợp ảnh chụp để xác định, định vị vạch kẻ đường, cũng như các vật thể 3D như biển báo, cột điện, đèn giao thông và lề đường.
Mitsubishi Mobile Mapping System: Hệ thống đo lường, định vị GPS di động có độ chính xác cao
Hệ thống vẽ bản đồ di động của Mitsubishi Electric: Hệ thống đo lường, định vị GPS di động có độ chính xác cao
http://www.mitsubishielectric.co.jp/pas/mms/
Ứng dụng trong khảo sát, trắc địa

Ứng dụng trong vẽ bản đồ

Ứng dụng trong duy tu bảo trì công trình đường
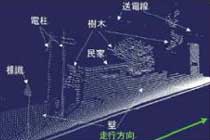
▼Định vị đối tượng bằng camera và máy quét laser, dễ dàng tạo bản đồ 3D có độ chính xác cao trong khu vực đô thị.

Giá niêm yết
Giá bán sản phẩm
-
Xem giá bán của phần mềm UC-win/Road
■Giá sản phẩm
Sản phẩm/Phiên bản
Bao gồm
Giá bán
UC-win/Road Ultimate UC-win/Road
+
đi kèm tất cả các pluginUSD 17,200 UC-win/Road Advanced UC-win/Road
+
Point Cloud Modeling plugin & các plugin khácUSD 8,800 UC-win/Road Point Cloud Modeling Plugin Plugin riêng lẻ USD 1,730 ■Giá giấy phép dạng di động (floating)
Quý người dùng có thể lựa chọn thêm giấy phép dạng di động, với mức phí cộng thêm là 40% giá sản phẩm gốc. Giấy phép dạng di động cho phép bất kỳ người dùng nào sử dụng sản phẩm từ bất kỳ máy tính nào trên thế giới.
Sản phẩm/Phiên bản
Giá bán
UC-win/Road Ultimate USD 6,880 UC-win/Road Advanced USD 3,520 UC-win/Road Point Cloud Modeling Plugin USD 692
Phí gia hạn hợp đồng dịch vụ thuê bao (subscription service)
Phí gia hạn hợp đồng dịch vụ thuê bao
-
■Nội dung hỗ trợ
- Cập nhật phiên bản miễn phí - Hỗ trợ kỹ thuật (email, điện thoại)
- Dịch vụ download - Dịch vụ thông báo bảo trì qua email
* Từ ngày 01/04/2016 FORUM8 áp dụng chính sách trả phí thuê bao (subscription service) nhằm tăng cường hỗ trợ cho đa dạng nhu cầu sử dụng sản phẩm và giảm chi phí quản lý giấy phép.
Sản phẩm Phí gia hạn năm đầu tiên Phí gia hạn từ năm thứ 2 (phí thường niên) Phí thuê bao (UC-win/Road Point Cloud Modeling Plugin) Miễn phí USD 692 Phí thuê bao (UC-win/Road Point Cloud Modeling Plugin
Giấy phép dạng di động)USD 968
Giá giấy phép cho thuê (rental) / giấy phép cho thuê dạng di động (floating)
■Giấy phép cho thuê (Rental license): giấy phép cho thuê phần mềm ngắn hạn, chi phí thấp phù hợp với nhu cầu sử dụng phần mềm trong thời gian ngắn
■Giấy phép cho thuê dạng di động (Floating rental license): Chỉ cần xác thực giấy phép qua hệ thống web, bất cứ người dùng nào cũng có thể sử dụng phần mềm từ bất cứ máy tính nào trên thế giới.
■Giấy phép cho thuê dạng rental access: Người dùng có thể lựa chọn thêm số lượng giấy phép sử dụng sản phẩm đang sở hữu, khi đó giấy phép sẽ được cấp trong khoảng thời gian nhất định (1 đến 3 tháng). Chúng tôi sau đó sẽ gửi hóa đơn đến quý người dùng dựa trên dữ liệu ghi lại quá trình sử dụng. Giá đăng ký trước sẽ rẻ hơn 15% so với giá giấy phép cho thuê. Người dùng vui lòng đăng ký tại trang thông tin người dùng.
*Giấy phép cho thuê / cho thuê dạng di động được FORUM8 áp dụng từ ngày 03/09/2007 nhằm nâng cao trải nghiệm người dùng khi sử dụng sản phẩm của FORUM8.
*Thời hạn giấy phép cho thuê/ giấy phép di động không thể thay đổi sau khi giấy phép cho thuê/ cho thuê dạng di động bắt đầu có hiệu lực. Nếu cần thiết gia hạn thời hạn của 2 loại giấy phép này, người dùng vui lòng đăng ký lại.
Giấy phép cho thuê/ Giấy phép cho thuê dạng di động
-
■Giá giấy phép cho thuê (rental)
Sản phẩm 2 tháng 3 tháng 6 tháng UC-win/Road Point Cloud Modeling Plugin USD 778 USD 916 USD 1,124 ■Giá giấy phép cho thuê dạng di động (floating)
Sản phẩm 2 tháng 3 tháng 6 tháng UC-win/Road Point Cloud Modeling Plugin USD 1,297 USD 1,539 USD 1,903 Đặt hàng / Liên hệ
Đặt hàng / Liên hệ với chúng tôi
-
Yêu cầu liên quan đến UC-win/Road vui lòng gửi email về road@forum8.co.jp
Đặt hàng
Liên hệ với FORUM8 tại đây hoặc gửi email về info-hanoi@forum8.com (tiếng Việt) hoặc ist@forum8.co.jp (tiếng Anh/Nhật).


LOADING