概要
 |
|
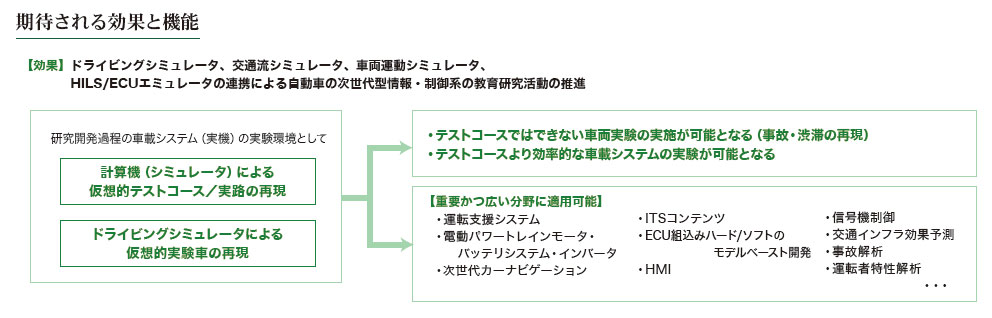
フォーラムエイトは、高度研究用ドライビングシミュレータ「情報利用型人間-自動車-交通流相互作用系シミュレーションシステム」を、2012年3月22日、九州大学大学院統合新領域学府へ納入いたしました。自動車の次世代型情報・制御系の教育研究活動の推進が期待されます。
本シミュレータは、ドライビングシミュレータ、交通流シミュレータ、車両運動シミュレータ、HILS/ECUエミュレータ、視線計測装置等を、バーチャルリアリティUC-win/Roadによるインテグレーションで連携させた運転シミュレーションシステムです。
研究開発過程の車載システム(実機)の実験環境として、テストコースでは不可能な車両実験(事故・渋滞など)を実現し、運転支援システム、次世代カーナビゲーション、ITSコンテンツ、交通インフラ効果予測、事故解析、運転者特性解析など、幅広い分野での高度な活用が可能です。
ハードウェアは6自由度0.7G対応モーションプラットフォームを採用しています。
|
|
■ Webニュース紹介記事
■ プレスリリース
■ 関連製品
■ リンク
|
|
|
機能と特長
|
|
| 九州大学「情報利用型人間-自動車-交通流相互作用系シミュレーションシステム」 |
6軸モーション対応、5チャンネル 実車部品タイプドライブ・シミュレータ
2012年 3月 納入
 |
 |
 |
 |
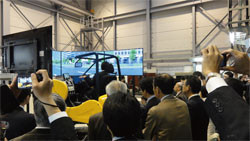
▲情報利用型人間−自動車−交通流相互作用系シミュレーションシステム見学会
(2012年3月23日/於:九州大学) |
●ドライビングシミュレータ概要
| タイプ |
6軸 5チャンネル ドライビングシミュレータ |
| モデル名 |
PR-R-5-55-AW-AT-200-6X |
| 電源 |
3相 220VAC 15kw 50/60Hz |
| 質量 |
運転席キャビン: 230kg
モニターアセンブリ: 21.6kg×5
モーションプラットフォーム: 600kg |
|
■運動性能仕様
モーションプラットフォームの運動性能仕様は次の表に示します。
| 項目 |
数値 |
単位 |
| 可動範囲 |
サージ(前後) |
±220 |
mm |
| スウェイ(左右) |
±190 |
mm |
| ヒーブ(上下) |
±197 |
mm |
| ロール |
±20 |
deg |
| ピッチ |
±25 |
deg |
| ヨー |
±18 |
deg |
| 最大速度 |
サージ(前後) |
±400 |
mm/sec |
| スウェイ(左右) |
±400 |
mm/sec |
| ヒーブ(上下) |
±400 |
mm/sec |
| 最大加速度 |
サージ(前後) |
±0.7 |
G |
| スウェイ(左右) |
±0.7 |
G |
| ヒーブ(上下) |
±0.7 |
G |
| 質量 |
600 |
kg |
| 電源設備容量 |
3 相 AC200V 15kVA |
|
■期待される効果と機能
■ システムの特長
- 全10画面のクラスタ構成
- 6自由度0.7G対応モーションプラットフォーム
- HILS連携
- 交通シミュレータ連携
- 視線計測装置連携
|
|
|
Page Top  |
 |
|







>> 製品総合カタログ

>> プレミアム会員サービス
>> ファイナンシャルサポート
|