| New Products |
|
|
●最新版製品価格 |
●リリース 2013年2月
UC-winシリーズ
シミュレーション |
|
|
|
交通安全研究、インフラ協調、自動車研究開発などでは、様々な運転状況で調査・検証及び実験を行う必要があります。特に、システムの自動化、車載アシストシステム開発の中で運転状況を細かく再現させるニーズが増えています。こういったニーズに応えるために、UC-win/Road
Ver.9ではシナリオ機能、マイクロシミュレーションプレーヤー、及びクラスターシステムの拡張を行い、自動運転機能を追加しました。
また、シミュレーション機能の他に操作性の改善と新たなモデリング機能を追加しました。
- シナリオでは、交通制御機能、特に周辺車両の細かな制御ができるようにシナリオ機能を拡張しました。
- マイクロシミュレーションプレーヤーでは、予め記録した任意の動きを再生しますが、交通シミュレーションとの統合を改善しました。
- クラスターシステムでは、新たにアクティブクライアントを提供できるようになりました。アクティブクライアントで1人のユーザが運転や歩行操作を行う際、クラスターに接続している他のクライアントと環境を同期させることが可能になりました。
- 自動運転機能では、一般的な車間距離制御システム(Adaptive Cruise Control、ACC)を実現する他、自車を完全に自動走行させる機能にも対応します。
- 新たに追加されたモデルパネルでは、全てのモデル類の読み込み、配置などの管理、及び検索を1つの画面で可能になりました。
- 以前から路面マーキング、道路付属標識、樹木などをパラメータで生成できますが、階段やポスター、LED表示のサイン、エスカレータ、柵をパラメトリックモデルとして作成できるようになりました。
|
シナリオ拡張
UC-win/Road Ver.9のシナリオ機能で動的に制御可能なパラメータについて次の通り拡張を行いました。
まず、他車に対して走行速度、車線番号、車線キープオフセットを動的に変更可能になりました。これに伴い、交通車両の中で先行車両を認識し、任意な場所や時間で先行車両に制御コマンドを発行することが可能になりました。自車の場合はACC機能のパラメータ、自動運転では他車と同じパラメータが変更可能です。
またシナリオの流れ(遷移)を制御する条件について先行車両が選択可能になり、制御コマンドと同様に任意な場所や時間で自車の前にある車両を条件判定に使用できます。例えば、先行車両との車間距離、先行車両までの到達時間や衝突をシナリオの遷移制御に使用できるようになります。これらのコマンドで様々な走行状況を再現できます。自車と右車線にある車両との車間距離によって車線変更コマンドを発行することにより他車の割り込みのシーンを作成したり、車線キープオフセットの変更で先行車両のふら付きや片寄せの表現が可能になります。
その他、Ver.9では、歩行シミュレーションを管理する事ができます。歩行の開始・終了、歩行者のモデル選択等が可能になりました。
交通スナップショット機能
以前からリプレイプラグインまたはマイクロシミュレーションプレーヤーで記録したシミュレーションの再生はできましたが、Ver.9で交通状況のスナップショット機能を追加しました。再生ではなく、決まった交通状況からシミュレーションを開始したい場合は便利です。特に、車両数が多い場合は、本機能で一括に保存しておいた交通状況からシミュレーションを再開できます。自車両の運転状況も保存されているので、同時に運転再開が可能です。
 |
|
 |
| ■図1 車間距離による割り込みの再現イメージ |
|
■図2 交通スナップショット再開後:
車線変更中の車両、交差点内にある
車両の情報を保存して再開可能 |
ACC・自動運転機能
運転シミュレーションでの自車のACC機能及び自動運転機能を追加しました。これらの機能をITSや交通安全の研究や教育などに使用できると考えられます。
機能については、UC-win/Roadの交通流シミュレーションで行っている各車両の自動運転に基づいたACCに特化したアルゴリズムを開発しました。速度、及び目標のTTC(Time
to collision)を忠実に守り、マニュアル運転あるいは自動操縦を含めた完全自動運転機能との切り替えが可能です。また、インフラ協調のシミュレーションで信号と規制速度の認識も可能になります。
|
ドライブシミュレータ同期機能
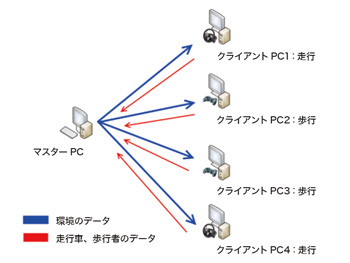
従来のUC-win/Roadのクラスターシステム(クラスタープラグインにより実現可能。有償オプション)では、運転シミュレーションの際、運転を行うのは一人(マスターPCのみ)の制限がありました。Ver.9では、複数の使用者が同時に同じVR環境で走行や歩行シミュレーションを行う事ができます。これをアクティブクライアントと呼んでいます。また、これらのシミュレーションは、一般的なゲームコントローラーと合わせて、表1に示すデバイスにより操作することが可能です。
| 走行 |
ハンドルとペダル |
| ゲームコントローラー |
| ドライブシミュレータとDSプラグイン連携(有償プラグイン) |
| キーボード |
| 歩行 |
ゲームコントローラー |
| キーボード |
■表1 クライアントPCでの操作方法
なお、本システムでは、クラスタープラグインで全てのPCを同期するので、接続された各コンピュータのVR環境は同様になります。
クラスターシステムを利用するのでユーザ同士の同期は低レイテンシーで行います。レイテンシーは、相手の動きが自分のモニターに表示されるまでの時間は1フレームに収めることができます。
またクラスターシステムなので交通状況、気象、可動モデル、旗や樹木の揺れなど、すべてのシミュレーション要素が完全に同期され、各ユーザが同じ状況かつ同じ時間でシミュレーションを行えます。また、マスターPCで管理者としてアクティブクライアントの視野の追跡が可能です。なお、これらの複数使用者のシミュレーションは、シナリオを用いて制御することもできます。
シミュレーションを行う時、特に実験の場合はシミュレーション情報の出力及び記録(ログ)が必要になります。本システムではマスターマシンでシミュレーション全体の記録また情報の出力が可能となっています。クライアントマシンでは、ユーザが操作している車両、歩行者、及びその周辺車両と歩行者の情報はログに出力されます。
将来に向けて、UC-win/Road Ver. 9ではクライアント側でユーザが操作している1台の車両あるいは1人の歩行者の計算を行いますが、シミュレーション全体の分散化を視野に入れています。
 |
 |
| ■図3 ドライブシミュレータ同期構成 |
■図4 ドライブシミュレータ同期の例 |
クライアント設定拡張
3D空間背景の非表示オプション
3D空間背景の非表示、UC-win/RoadのHUDとシナリオの画像、メッセージ、ビデオとスクリプトの画像、メッセージのみを表示を選択する事ができます。例えば、接続したロースペックPCにおける同期パフォーマンスを下げないために3D空間背景を非表示にし、マルチメディアコンテンツを表示する事が可能です。
ドーム用のプロジェクター追加設定
ドーム用のプロジェクターの新しい設定で、画面のアスペクト比無しに垂直FOVと水平FOVを同時に利用して描画する事ができます。また、プロジェクターのピッチ角度の対応も可能です。
|
モデルパネル
製品の使い勝手をより良くするために「モデルパネル」を開発しました(図5)。開発の目的は、一つの画面の中に様々な機能をまとめることです。実際、このパネル上であらゆるモデルの読み込み、削除、そして編集が同じインターフェースにより可能になります。また、一回のクリックで選択したモデルを地形上へ配置することも可能です。
「ユーザタグ」機能はプロジェクトに含まれたモデルの整理を補助します。また、実装した検索エンジンにより、タイプ(一般モデル、車輌、建物、…)、名前、拡張子(3ds、fbx、2d
tree)、タグなどにより素早く必要とするモデルを検索可能になりました。例えば、「一般モデルタイプに設定された、名称に“Street”が入っており、少なくとも“cheap”、“fashion”のユーザタグをもつ全てのモデル」の様な複雑な検索クエリーを実行することも可能です(図6)。
 |
|
 |
| ■図5 モデルパネルのインターフェース |
|
■図6 検索クエリー実行 |
モデルライブラリ
UC-win/Road Ver.9では「モデルライブラリ」の機能を実装します。その処理過程は単純で高速になる様に設計しました。使用しているコンピュータのデータフォルダのスキャンにより見つかったモデル(rm,
3ds、fbx)をメモリへの読み込み無しに自動的に作成し、モデルファイルのフォルダ名に応じてタグ付けします。モデルは配置や編集での使用する時に初めて全体的に読み込まれます。この新機能により個々のモデルを手動で読み込む必要が無くなるので、多くの時間を節約可能です。
パラメトリックモデルプラグイン
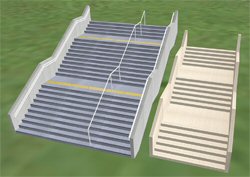
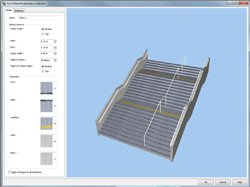
パラメトリックプラグインにより、パラメトリック入力の標識、階段、エスカレータ、または柵(フェンス)の作成が可能になりました(図7)。それぞれのモデルは編集画面により、例えば、階段の奥行きや高さ、バーの数、使用するテクスチャの設定など、希望どおりにカスタマイズ可能です(図8)。
パラメトリック階段の操作例
UC-win/Roadは自動的に階段フォルダに存在する画像に応じて自動的に作成します。モデルパネルで任意の階段を選択すると、カスタマイズ可能なパラメータ(高さ、幅、厚さ、色)を含むフレームにアクセス可能になります(図9)。これらのパラメータは何時でも編集可能で、編集後地形上をクリックすることで階段モデルのインスタンスを作成します。
 |
|
 |
| ■図7 パラメトリックモデル(階段)の例 |
|
 |
|
| ■図8 階段編集画面 |
|
■図9 モデルパネル上
での階段の編集 |
|
マイクロシミュレーションプレーヤーは、UC-win/Roadのシミュレーションの記録、再生を行ったり、他のアプリケーションのシミュレーション結果を再生したりするプラグインです。交通信号のサイクルや車両、キャラクタの移動が記録可能ですので、UC-win/Roadの交通を或るシミュレーションとして記録、再生させることが可能です。また、交通のマイクロシミュレーションや建築管理シミュレーション、歩行者の群集移動等の結果をリンクさせ、UC-win/Roadの3次元モデルを使用して再生できます。その他、道路外や飛行ルート外で移動オブジェクトを表示させることが可能です。
今回のVer.9では、オフロードの開発の経験を生かして、マイクロシミュレーションの最適化を行いました。地形と道路の標高取得のアルゴリズムを改善し、道路の在るプロジェクトでの標高計算パフォーマンスを改善しました。また、運転車両周辺のモデルをUC-win/Roadに引き継がせる処理の最適化や運転時先行車両の探知機能の開発を行いました。この探知機能により、先行車両の速度や位置等の情報が取得可能になります(図10)。
 |
| ■図10 先行車両の情報出力機能 |
|
Ver.9では、FBXモデルについて、透明度情報を持ったテクスチャへの対応を行いました。アルファチャンネルを持つテクスチャ、透過色設定を持つテクスチャファイルに対応し、設定された透明度情報によって、ポリゴンを透過にしたり、半透明にしたりすることが可能です(図11)。また、透明度情報を持たないテクスチャにおいても、黒色を透過色として設定することができます。
その他、Ver.9ではFBXモデルの高度な照明への対応を行い、ヘッドライト、ストリートライトを用いた場合にFBXモデルにおいてもライトの効果を反映するようになります(図12)。
 |
|
 |
■図11 アルファチャンネル
による透過表示 |
|
■図12 FBXモデルのライティング効果対応 |
|
新しくトレーラーの運転に対応しました。トレーラーは、通常の車両と異なり、牽引車(キャブモデル)と非牽引車(トレーラーモデル)をそれぞれ設定し、異なるモデルが連結されたものとして制御します。
図13は運転開始時の選択画面で、キャブモデル/トレーラーモデルをそれぞれ選択するように拡張されています。また、シナリオでも設定が可能ですので、トレーラーを運転するような体験シナリオを作ることもできるようになりました。
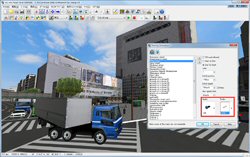 |
| ■図13 トレーラーの運転開始画面 |
|
| UC-win/Road Ver.9では、上記に紹介した様々な機能拡張を行いましたが、今後においても、車両運動モデルの改良(オーバーステアの実現)やDWGデータのインポート/エクスポート対応などの拡張、改善に取り組んでまいります。どうぞご期待ください。 |
●アプリケーションソフト本体 ※Trial VersionはHPからダウンロード申込みできます。
| 製品名 |
新規価格 |
改訂価格 |
詳細 |
| UC-win/Road Ver.9 Advanced |
\900,000 |
\80,000 |
点群モデリング、Civil 3D、InRoads、OSCADY PRO、xpswmm、12D Modelなどを含む |
| UC-win/Road Ver.9 Driving Sim |
\1,200,000 |
\180,000 |
ECO ドライブ、ドライブシミュレータ、マイクロ・シミュレーション・プレーヤー、ログ出力プラグインなどを含む |
| UC-win/Road Ver.9 Ultimate |
\1,700,000 |
\450,000 |
Driving SimおよびAdvancedの全てのプラグインオプションと、IFC/駐車場モデル読み込み/12d Model プラグインなどを含む※1 |
| UC-win/Road Ver.9 Standard |
\580,000 |
\80,000 |
プラグイン・オプションを含まない標準製品 |
| UC-win/Road Ver.9 Presentation Version |
\50,000 |
無償 |
Visual Option Toolsなどプレゼンテーション機能が使用できる製品 |
| UC-win/Road Cluster Client Version |
\50,000 |
無償 |
クラスターオプション(複数PCによる負荷分散マルチモニタ表示)のクライアントPC用製品 |
| UC-win/Road Multi User Client Version |
\100,000 |
無償 |
通常のクラスタークライアントに加え、運転と歩行シミュレーション機能を搭載。クラスターの中で他のマルチユーザクライアントとシミュレー ション同期が可能 |
| UC-win/Road Free Viewer |
無償 |
無償 |
3D空間での自由な移動、スクリプト再生が可能な無料ビューア製品 |
※1 オプション別売製品(Road for SaaS、SDK、クラスタ、モーション、RoboCar®など)は、含まれません。
●各種プラグイン/プラグイン対応表
| 製品名 |
Advanced |
Driving Sim |
Ultimate |
Trial |
新規価格 |
| 点群モデリング プラグイン |
○ |
- |
○ |
○ |
\150,000 |
| 騒音シミュレーション・オプション |
○ |
- |
○ |
○ |
\300,000 |
騒音シミュレーション・オプション
スパコンオプション |
- |
- |
- |
- |
\18,000/月 |
| Civil 3D プラグイン |
○ |
- |
○ |
- |
\75,000 |
| EXODUS プラグイン |
○ |
- |
○ |
- |
\300,000 |
| GISプラグイン |
○ |
- |
○ |
- |
\250,000 |
| InRoads プラグイン |
○ |
- |
○ |
- |
\75,000 |
| OSCADY PRO プラグイン |
○ |
- |
○ |
- |
\100,000 |
| Sidra プラグイン |
○ |
- |
○ |
- |
\75,000 |
| S-PARAMICS連携 プラグイン |
○ |
- |
○ |
- |
\80,000 |
| TRACKS プラグイン |
○ |
- |
○ |
- |
\150,000 |
| xpswmm プラグイン Ver.2(for Tsunami) |
○ |
- |
○ |
- |
\300,000 |
| 3Dモデル出力プラグイン |
○ |
- |
○ |
- |
\80,000 |
| シナリオ プラグイン |
○ |
○ |
○ |
○ |
\150,000 |
| マイクロ・シミュレーション・プレーヤー プラグイン |
○ |
○ |
○ |
○ |
\300,000 |
| コミュニケーション プラグイン |
○ |
○ |
○ |
- |
\300,000 |
| ドライブシミュレータ プラグイン |
- |
○ |
○ |
- |
\300,000 |
| ECOドライブ プラグイン |
- |
○ |
○ |
- |
\300,000 |
| リプレイ・オプション |
- |
○ |
○ |
○ |
\150,000 |
| ログ出力プラグイン |
- |
○ |
○ |
- |
\300,000 |
| 駐車場モデル読み込みプラグイン |
- |
- |
○ |
- |
\80,000 |
| IFCプラグイン |
- |
- |
○ |
- |
\80,000 |
| 12d Model プラグイン |
- |
- |
○ |
- |
\75,000 |
| Legion連携プラグイン |
- |
- |
- |
○ |
\80,000 |
| マンセルカラースペース出力プラグイン |
- |
- |
○ |
○ |
\200,000 |
リモートアクセスプラグイン
(VR-Cloud® Flash Version) |
- |
- |
- |
○ |
\300,000 |
| 無料ビューア出力プラグイン |
- |
- |
○ |
- |
\75,000 |
| モーションプラットフォーム プラグイン※1 |
別売りオプション |
\800,000 |
| スパコンクラウド® 流体解析連携プラグイン |
\300,000 |
| VR-Studio®プラグイン |
\75,000 |
| クラスターオプション※2 |
\800,000 |
| 津波プラグイン |
\300,000 |
※1:システムオプション:システム開発用のみ提供 ※2:基本構成 : スレーブPC 3台、サーバPC 1台
|
|






>> 製品総合カタログ

>> プレミアム会員サービス
>> ファイナンシャルサポート
|



