 |
Kinect(TM) センサー |
HARDWARE INFORMATION
2011-No.2 |
|
|
|
|
|
|
Kinect(TM)センサー(以下、キネクト)は、Microsoft社販売の家庭用ゲーム機「Xbox360(R)」の周辺機器としても用いられ、コントローラーを用いることなく身体の動き、ジェスチャー、音声などによる操作を可能とするデバイスです。カメラやセンサーが搭載されており、キネクトの前にプレイヤーが立つと自動的にプレイヤーが認識されるようになっています。
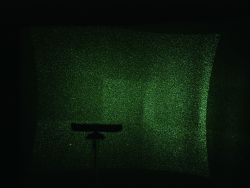
この技術は研究開発会社、プライムセンス社が開発した距離カメラテクノロジーをベースとしており、センサーにはVGAカメラ、3Dスキャナー、4つのマイク、傾斜モーターなどの基部が含まれています。3Dスキャナは点パターンを連続的に与える赤外線レーザー(周波数は赤信号より少し低い)で構成されています。レーザーは人間の目には見えませんが(波長は約780nm)、暗視カメラで検知できます(図1a・1b)。
 |
|
 |
| ▲図1a キネクトセンサーの暗視モード画像 |
|
▲図1b 壁に投影した点パターンの拡大ビュー |
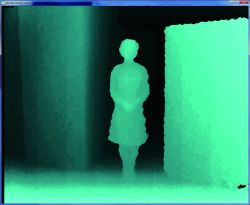
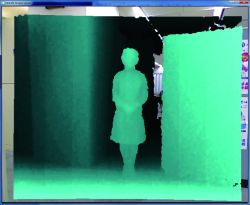
赤外線カメラによってセンサーと点との距離を予測し、周辺環境の深度図を作成します。図2はそれぞれカメラ出力(図2a)、深度図(図2b)、合成図(図2c)を示しています。
| ▼図2 カメラフィードに与えられた周辺環境の深度図 |
 |
|
 |
|
 |
| ▲図2a VGA カメラ出力 |
|
▲図2b 周辺環境の深度図 |
|
▲図2c カメラ出力と深度図 |
キネクトには以下のような機能があります。
- モーションキャプチャ(最大6人まで)とジェスチャー認識機能。ジェスチャーでインタフェースを制御可能
- 表情認識機能。ユーザを選択し過去に保存した設定を自動選択
- 声認識機能。ボイスコマンドの実行
- 回転ベース。最適トラッキングに合わせてセンサー傾斜角を調節
| ■ UC-win/Road とキネクトの連携によるドライブシミュレーション |
Open NI API (Open Natural Interaction, http://www.openni.org/)のサイトから入手できるキネクトのオープンソースドライバを利用して、センサーとUC-win/Roadを連携させることで、手を動かすだけでドライブシミュレーションの体験が可能になります。座位置または立ち位置から「仮想ハンドル」を握るイメージで手を握ります(図3)。この姿勢は実際の運転状態と非常に近いので、自然な運転状態を保つことができます。
 |
| ▲図3 キネクトによる走行 |
キャリブレーション実行後、ユーザは車両を制御できるようになります。仮想ハンドルを回転させて、左折・右折の操作を行うことができます(図4a)。
 |
 |
| ▲図4a 仮想ハンドルを左に回すことで左折 |
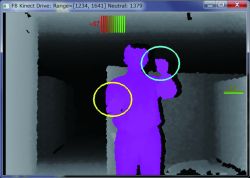
速度制御は、仮想ハンドルを握った両手を前後に動かすことで簡単に行えます(図4b)。これはキネクトから両手までの距離を検出することで行っており、腕を前に出すとアクセル、後ろに引くとブレーキとなります。
 |
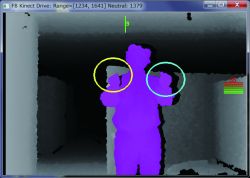 |
| ▲図4b 仮想ハンドルを握った腕を前に引っ張ることで減速 |
現在マニュアルでキャリブレーションを実行していますが、自動適応させインタフェースがさらに使いやすくなるよう開発中です。
|
|
| ※社名、製品名は一般に各社の登録商標または商標です。 |
|
| (Up&Coming '11 新春号掲載) |
 |
|







>> 製品総合カタログ

>> プレミアム会員サービス
>> ファイナンシャルサポート
|

